
Fターム[2F065SS03]の内容
光学的手段による測長装置 (194,290) | 指示;記録 (4,025) | 指示、記録内容 (1,715) | キャラクター(文字、数字) (406)
Fターム[2F065SS03]に分類される特許
141 - 160 / 406
画像計測装置及びコンピュータプログラム
【課題】計測対象物を撮像した画像に固有の特徴量情報に基づいて計測条件を特定することができる画像計測装置及びコンピュータプログラムを提供する。
【解決手段】計測対象物が載置されるステージ上に照射した光の透過光又は反射光を撮像素子に結像させて得られる画像に基づいて、計測対象物の形状を計測する。計測対象物の計測条件に関する情報に対応付けて、該計測対象物の形状に固有の特徴量情報を記憶しておく。撮像素子にて結像して得られた計測対象物の画像を視野の範囲内で表示し、計測対象物の画像に基づいて特徴量情報を抽出する。抽出された特徴量情報と略一致する特徴量情報が記憶されているか否かを判断し、略一致する特徴量情報が記憶されていると判断した場合、該特徴量情報に対応付けて記憶されている計測条件に関する情報に基づいて計測対象物の形状を計測する。
(もっと読む)
発光装置及び対象物の追尾方法

【課題】発光装置(対象物)の位置を追跡しつつ、データの読み取りも円滑に行うことが可能な技術、発光装置を提供する。
【解決手段】「色彩の変化の変化(変化の切り替え)」でデータを表す発光装置を提供する。最初の1次変化で、その物体の特定、位置の特定を行い、その後、いわば2次変化(1次変化の切り替え)でデータを表している。したがって、物体の位置の特定を行いつつ、自由にデータを表すことが可能となったものである。
(もっと読む)
デジタルカメラ
【課題】 従来のカメラでは、被写体の大きさを正確に測定できず、また、被写体の表示画面にスケールを表示させようとすると、撮影時のカメラ操作が煩わしくなってしまう。
【解決手段】 CPU4は、撮影画像の再生表示が開始されると(S11)、記録媒体17から読み出した撮影情報に含まれる被写体21の半画角θおよび撮影距離f’に基づいて、撮像素子2における撮影画像の単位記録画素当たりの被写体21のサイズを算出する(S12,S13)。続いて、算出した撮影画像の単位記録画素当たりの被写体21のサイズを、液晶モニタ7における再生時の撮影画像の単位表示画素当たりのサイズに変換する処理を行う(S14)。続いて、十字キーに対する操作によって、液晶モニタ7に再生表示される撮影画像の任意の2点の位置が指定されると、指定された2点間の撮影時の被写体21のサイズLABを算出する(S15,S16)。
(もっと読む)
車両の床下地上高測定装置
【課題】作業性良好、かつ短時間で車両床下の地上高を測定できる測定装置を提供すること。
【解決手段】長尺の台座2の一端に台座2に平行に光を照射する光距離計3を設置するとともに、台座2の他端に光距離計3から所定の距離Lをおいて光距離計3からの照射光を垂直上方に反射する傾斜角θの反射鏡4を設置した構成で、反射鏡4を車両床下の測定対象個所5の垂直下方に位置せしめて台座2を測定基面G上に載置し、光距離計3から反射鏡4を介して測定対象個所5に至る距離の実測値から上記所定の距離(L)を減算するとともに、減算した値に反射鏡4の反射点Pの測定基面Gからの高さ距離(H3)を加算した距離を測定対象個所5の地上高(H)として読み取る。
(もっと読む)
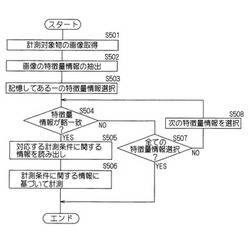
画像計測装置及びコンピュータプログラム
【課題】パターンマッチングによる計測が正しく行われない場合の原因が人為的ミスである場合にはその旨を検知することができ、不要な手戻りが生じることが無い画像計測装置及びコンピュータプログラムを提供する。
【解決手段】撮像素子にて結像して得られた計測対象物の画像を視野の範囲内で表示する。計測対象物の計測条件に関する情報に対応付けた該計測対象物の形状パターン画像データを記憶しておき、計測条件に関する情報に対応付けて記憶されている形状パターン画像データと、計測対象物の画像に対応する画像データとの一致度を算出する。算出した一致度が所定値より小さい場合、形状パターン画像データを表裏反転させた表裏反転パターン画像データと計測対象物の画像に対応する画像データとの一致度を再算出する。再算出した一致度が所定値以上である場合、計測対象物を表裏反転させて載置する旨のメッセージを表示出力する。
(もっと読む)
深さ測定装置及び深さ測定方法
【課題】外部から視認することができないような穴の深さも測定可能な深さ測定装置及び深さ測定方法を提供することを目的とする。
【解決手段】深さ測定装置は、被検査物に形成された穴の一方の入口を照明する第1の光源(4)と、穴の一方の入口のテーパ状部を撮影した第1の画像を取得する第1の内視鏡(2)と、被検査物に形成された穴のテーパ状部を撮影した画像のテーパ状部に対応する領域における、その穴の半径方向の輝度勾配とテーパ状部の深さの関係を示す参照テーブルを記憶した記憶部(63)と、第1の画像から一方の入口のテーパ状部における穴の半径方向の輝度勾配である第1の輝度勾配を求め、第1の輝度勾配と参照テーブルを参照して一方の入口のテーパ状部の深さを求める深さ測定部(61)と、を有する。
(もっと読む)
表面形状測定方法及び表面形状測定装置
【課題】検査対象物表面からの反射光のノイズ成分を除去して反射光のピーク輝度の検出を容易にし、測定精度の向上を図る。
【解決手段】対物レンズを介して検査対象物上に複数の光ビームを照射して複数の測定点を指定し、前記対物レンズと検査対象物との間隔を変化させながら、撮像手段で前記複数の測定点からの反射光を受光して前記各測定点に対応する複数の輝度を取得し、該複数の輝度から前記各測定点のピーク輝度を検出して前記検査対象物表面の凹凸形状を測定する表面形状測定方法であって、前記各測定点に対して光ビームの照射及び照射停止の明暗二つの状態を交互に与えて各状態における輝度を取得し、前記測定点毎に前記明暗二つの状態の輝度を減算処理して相対輝度を算出し、前記対物レンズと検査対象物との間隔を変化させながら前記測定点毎に得られた複数の前記相対輝度から各測定点のピーク輝度を検出するものである。
(もっと読む)
内視鏡装置およびプログラム
【課題】操作の煩わしさを低減し操作性を向上することができる内視鏡装置およびプログラムを提供する。
【解決手段】基準点指定部18bは、映像信号に基づく画像上の3つの基準点を指定する。バーニング構成点算出部18dは、3つの基準点で決定される基準楕円上に設定した複数点の各々に基づく画像領域内で映像信号を処理し、バーニングを構成するバーニング構成点を算出する。バーニング構成点修正部18gは、ユーザからの指示に基づいて構成点を修正する。バーニングサイズ算出部18eは、バーニング構成点に基づいてバーニングのサイズを算出する。
(もっと読む)
対象物の物理的特徴を読み取るための方法及び装置
対象物上の物理的特徴を読み取る方法は、対象物の少なくとも一部の第1の画像を第1の解像度でキャプチャするステップ(240、315、405)と、第1の画像に従って処理されることになる対象物の領域の位置を決定するステップ(245、320、415、420)と、処理されることになる対象物の領域の第2の画像を第1の解像度よりも高い第2の解像度でキャプチャするステップ(255、330、430)と、第2の画像に基づいて物理的特徴を決定するステップ(260、335、440)と、を含む。幾つかの実施形態において、追加として、物理的特徴の少なくとも一部を表す情報を保持するマークで対象物をマーキングするステップがある。  (もっと読む)
(もっと読む)
可変端度器
【課題】 長さ測定機器全般の精度校正用として、校正寸法を連続的に変化させることを可能にする寸法可変式の端度器を提案すること。
【解決手段】 二つの互いに平行な対向又は背向するゲージ基準面16,17と、それら二つのゲージ基準面16,17の距離間隔をその平行な状態を維持しながら任意に変更し得る、少なくとも一方のゲージ基準面の可動手段15と、その際の二つのゲージ基準面16,17の距離間隔を随時測定して出力し得る測定手段14と、その測定手段14を校正した結果から得られた器差データを記憶する記憶手段と、測定手段14により得られた測定値を記憶手段に記憶された器差データを用いて補正する器差補正手段とを備えている。
(もっと読む)
位置合わせを行う装置、方法、およびプログラム、ならびに基準モデルを作成する装置、方法、およびプログラム
【課題】モデルを利用した位置合わせにおいて、人間の関与を極力減らし、画像認識に資する部分を効率的にモデル化するための技術を提供する。
【解決手段】位置合わせを行う対象物と同じ種類の基準物に含まれる基準パターンである回路パターン2を撮像した撮像画像1から、特徴点抽出処理により特徴点3a〜3dなどの複数の特徴点が抽出される。そして、抽出された複数の特徴点それぞれの座標を含むモデル特徴箇所座標群5を含む基準モデルが記憶される。基準モデルは、各特徴点の周辺から切り出した画像を含むモデル特徴箇所画像群4をさらに含んでもよい。対象物を撮像して取得した対象撮像画像から抽出された複数の特徴点それぞれの座標と、基準モデル内のモデル特徴箇所画像群4とを利用して、基準パターンと対象パターンのずれを表すずれ量を算出して対象物に関する位置合わせ処理を行うことが可能である。
(もっと読む)
画像計測装置、画像計測方法及びコンピュータプログラム
【課題】計測対象物の外形等の角部に設けられた円弧を容易にかつ精度良く計測することができる画像計測装置、画像計測方法及びコンピュータプログラムを提供する。
【解決手段】撮像素子にて得られた画像を表示する表示手段332、画像上の計測対象物の所定のエッジ部分を含むエッジ検出領域の指定を受け付ける指定受付手段333と、エッジ検出領域内のエッジ点の座標値を取得する座標値取得手段334、円弧を挟んで円弧に連続する2本の直線状部分上のエッジ点の座標値に基づいて2本の直線部分を特定する直線部分特定手段51、2本の直線部分の延長線が交差して円弧を挟む角を二等分する中線を特定する中線特定手段52及び中線が円弧と交わる交点を特定する交点特定手段53を含んで交点等に基づいて円弧を特定する円弧特定手段335、特定した円弧の形状を受光レンズの倍率で換算する形状倍率換算手段336を備える。
(もっと読む)
移動体の挙動計測装置および移動体の挙動計測方法
【課題】移動体の挙動を高い精度で計測できる移動体の挙動計測装置および移動体の挙動計測方法を提供する。
【解決手段】本発明は、少なくとも2方向の異なる方向から一定の時間間隔で連続的に、移動体に設けられたマーカの像の輝度を変えて多重撮影し、複数のマーカの像を取得する撮影部と、輝度が異なるマーカを基準として撮影されたマーカを撮影順に対応付け、各マーカの中心点の位置を抽出する抽出部と、移動体を再現した3次元形状モデルと、3次元形状モデル上のマーカ特徴点に対応する3次元形状モデル上の対応点の位置を記憶保存するデータ記憶部と、複数のマーカの対応点の位置が抽出部で抽出されたマーカの像の位置と一致するように3次元形状モデルの位置および向きを算出して移動体の挙動を再現した3次元形状モデルの位置および向きの時系列データを算出する算出部とを有する。
(もっと読む)
顕微鏡用撮像装置と、対物ミクロメータ
【課題】キャリブレーション操作の煩わしさを軽減可能な、顕微鏡用撮像装置と対物ミクロメータを提供すること。
【解決手段】観察手段により観察される標本像を撮像し、観察画像を出力する撮像手段21と、前記撮像手段の撮像範囲内に含まれる1つまたは複数の寸法校正用パターンと当該1つまたは複数の寸法校正用パターンの近傍にそれぞれ配置された寸法情報パターンの中から、前記撮像範囲内の最外周部近傍に位置する前記寸法校正用パターンを少なくとも1つ選択し、選択した前記寸法校正用パターンに対応する前記寸法情報パターンから当該寸法校正用パターンの寸法情報を取得する寸法情報取得手段23と、取得した前記寸法情報と選択した前記寸法情報パターンに対応する前記寸法校正用パターン画像の画素数とから1画素当たりの実寸法を算出する寸法校正手段23と、を有することを特徴とする顕微鏡用撮像装置2。
(もっと読む)
位置検出装置
【課題】本発明は、指示体以外から投射された光であるノイズ光の有無を検出することが可能な位置検出装置を提供することを目的とする。
【解決手段】本発明による位置検出装置は、同期信号投射手段5、6によって投射された非可視光を表示スクリーン11の前面11a側から受光することにより、非有効期間を認識する間、表示スクリーン11の前面11a側に光を投射して指示することが可能な指示体2と、指示体2から投射された光と指示体2以外から投射された光とを表示スクリーン11の背面11b側から撮影して電気信号に変換する撮像手段3と、撮像手段3にて変換された指示体2以外から投射された光の電気信号を解析し、表示スクリーン11上における指示体2以外から投射された光の有無を検出する画像処理手段4Bとを備えることを特徴とする。
(もっと読む)
偏心測定方法および装置
【課題】偏心測定方法および装置において、被検レンズ系の被測定面の面間隔の製作誤差の影響を受けることなく、偏心量の測定精度を向上することができるようにする。
【解決手段】第1面の偏心量を算出し、被検レンズ系と投影光学系との光軸方向の相対位置を第1測定位置として取得する第1面偏心測定工程(ステップS2)と、投影光学系を第i面の測定開始位置に相対移動する測定位置移動工程と(ステップS4)、第i面に光源の像を投影し、投影光学系の光軸方向の位置を調整して、第i面での反射光による光源の像を像面に結像させ、この像位置の情報を取得し、被検レンズ系と投影光学系との光軸方向の相対位置を第i測定位置として取得する第i面測定工程(ステップS5)と、面間隔データを実測値に修正したレンズ設計データを用いて、第i面の偏心量を算出する第i面偏心量算出工程(ステップS6)とを備える偏心測定方法を用いる。
(もっと読む)
三次元測定装置及び三次元測定方法
【課題】画角を変更する操作に応じた三次元画像を取得可能にする。
【解決手段】被写体を撮像する撮像手段を備えてなる三次元測定装置において、三次元画像データを取得し、取得した三次元画像データを、三次元画像データで表わされる三次元画像の少なくとも一部ob1の奥行き方向の位置及び/又は大きさが変化するように、前記撮像手段の画角変換操作部材の操作T、Wもしくは該操作部材の操作T、Wに対応する操作に基づいて処理する。
(もっと読む)
変位検出装置
【課題】被測定面の面粗度の影響による誤差を緩和させると共に、測定目的に応じた最適な精度で被測定面の変位を検出する。
【解決手段】光源102から射出された射出光Lは光調整部材130Aに入射され、光調整部材130Aにより射出光Lの解像度が調整される。光調整部材130Aでは、射出光Lの近軸光線が遮光されて、射出光Lの解像度が低下するように調整される。解像度が調整された射出光Lは、第1の対物レンズ114により被測定面TGに集光される。被測定面TGにはビーム径が広がった状態の射出光Lが集光される。被測定面TGに集光された射出光Lは被測定面TGで反射され、反射された反射光Lrが受光素子120によって受光される。これにより、非接触センサ100Aの分解能を低下させることができ、被測定面TGの面粗さの影響による測定誤差を緩和させて、より正確に被測定面TGの変位を検出することができる。
(もっと読む)
距離測定装置及びそのプログラム
【課題】精度の高い測定を優先した距離測定を簡単な操作で行なうことができる距離測定装置及びそのプログラムを提供する。
【解決手段】画像を取得すると、特徴点評価値が所定の範囲内である点を特徴点として検出し、得られた特徴点を示す情報を●マーク(601)を、現左右カーソルにて選択している特徴点は■マーク(610)を付けてLCDモニタ4上に基準画像とともに図6(a)のように表示し、表示された特徴点を示す情報から1つを左右カーソルの移動及びセットキーの操作により選択すると図6(b)で示されているように第1の選択点620として表示する。次に検出する特徴点評価値が所定の範囲内を変更し、変更した範囲内で検出された特徴点を●マーク(602)にて図6(c)のように表示させ、第1選択点と同様に第2選択点630を選択し、図6(d)のように表示させ、選択された2点間の距離を測定し、図6(e)のように表示させる。
(もっと読む)
三次元形状計測システムおよび三次元形状計測方法
【課題】搬送中の振動による誤差を補正する。
【解決手段】三次元形状計測システム1は第1基準物11および第2基準物22を備えている。三次元形状算出部18bは、測定対象物10とともに搬送される第1基準物11および第2基準物22の像の形状に基づいて、測定対象物表面による反射光の像の形状を式(3)を用いて補正する。このように、測定対象物10とともに搬送されるものの形状に基づいて補正を行うことにより、本発明によれば、搬送の前後段で配置された例えば生産機械の振動による時間的なデータずれを補正することができる。
(もっと読む)
141 - 160 / 406
[ Back to top ]