
Fターム[2F065SS03]の内容
光学的手段による測長装置 (194,290) | 指示;記録 (4,025) | 指示、記録内容 (1,715) | キャラクター(文字、数字) (406)
Fターム[2F065SS03]に分類される特許
101 - 120 / 406
傾き測定装置
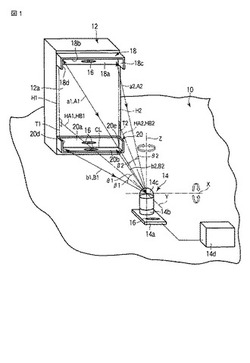
【課題】従来に比べ、天候とは無関係に傾き測定終了まで要する時間を短縮することが出来、しかも測定精度を向上させることが出来る、傾き測定装置を提供することである。
【解決手段】夫々がL字形状横断面を有し、台座10に設置された物体12において台座から立ち上がった平坦な表面部位12aの上部及び下部の夫々に水平に着脱可能に固定される上部及び下部光反射部材18,20と;台座において上記表面部位に対向し台座からの振動を遮断して配置されたレーザ測定器14と;を備える。レーザ測定器により上部及び下部光反射部材の夫々の上記両端の夫々までの距離A1,A2,B1,B2及び垂直角を測定し、これらの測定値からレーザ測定器から上記夫々の上記両端の夫々までの水平距離HA1,HA2,HB1,HB2を求めるとともに、これらの水平距離の差異により上記表面部位の前後方向傾斜量及び左右方向傾斜量を求める。
(もっと読む)
位置計測用演算装置、位置計測システムおよびプログラム

【課題】 対象物に配置する基本標識の数が4つ以上の場合に比べ基本標識の設置領域を小さくすることができる位置計測用演算装置、位置計測システムおよびプログラムを提供する。
【解決手段】 位置計測システムは、対象物1に配置された位置関係の分かっている3つの基本標識a1,a2,a3と、2次元撮像素子2を有する撮像装置3と、撮像装置3により撮像した3つの基本標識a1,a2,a3の画像に基づいて対象物1の3次元位置候補を1つ乃至4つ算出し、この算出した3次元位置候補を用いて対象物1の3次元位置および角度の少なくとも一方を求める演算を行う位置計測用演算装置4とを備える。
(もっと読む)
テンプレートマッチングシステムおよびテンプレートマッチング方法
【課題】テンプレートマッチングにより取得したテンプレートに基づいて、部品が載置されている姿勢が安定的か、否かを判定し、不安定な場合は警告を生成する。
【解決手段】テンプレートマッチング部100は、取得したワーク130の設計データに基づいて形状を抽出し、複数の姿勢で平面に射影した複数の射影像を生成し、それぞれの姿勢に応じて形状の姿勢を仮想的に変化させ、形状の姿勢が復元する結果に基づいて、姿勢毎に載置された場合の安定度を算出し、射影像のそれぞれに応じて生成したテンプレートと安定度と対応付けて記憶し、撮影したワーク130の撮影画像に対応するテンプレートをマッチングにより選択し、選択したテンプレートに対応した安定度に基づいて、ワーク130が載置された姿勢について警告するか、否かを判定し、警告すると判定した場合、警告を示す警告信号を生成する。
(もっと読む)
薄膜検査装置及びその方法
【課題】複数の薄膜が積層された状態で各薄膜の膜厚を計測すること。
【解決手段】薄膜検査装置は、第1透明薄膜及び第2透明薄膜の少なくとも一方の膜厚変動に影響を受ける分光反射スペクトルの特徴量の中から少なくとも2つの特徴量を選択し、選択した該特徴量の各々と第1透明薄膜の膜厚及び第2透明薄膜の膜厚とをそれぞれ関連付けた少なくとも2つの特徴量特性が格納された記憶部14と、被検査基板Sに対して透明ガラス基板側から白色光を照射する光照射部11と、被検査基板Sからの反射光を受光する受光部12と、受光された反射光に基づく分光反射スペクトルから記憶部14に格納されている各特徴量の実測値を求め、求めた各特徴量の実測値と記憶部14に格納されている特徴量特性とを用いて、第1透明薄膜及び第2透明薄膜の膜厚をそれぞれ求める演算部15とを備える。
(もっと読む)
検出方法、光学特性計測方法、露光方法及び露光装置、並びにデバイス製造方法
【課題】液浸型露光装置においてウエハ上に形成された計測用マークを検出する。
【解決手段】マークが形成されたウエハの表面に撥液膜を形成し(ステップ600)、該撥液膜を介してマークが形成されたウエハ上の領域に光を照射し、該光の物体からの戻り光を受光して前記領域を撮像し(ステップ608)、該撮像結果からマークの形成状態を検出する(ステップ610)。このため、検出に際して液体の付着が問題とならず、常時液浸タイプの露光装置においても、結像式アライメントセンサ等を用いてマークの形成状態の高精度な検出を、支障なく行うことが可能となる。さらに、撥液膜の膜厚等に応じて検出光の波長帯域を決定し(ステップ602)、その波長の検出光を用いて前記領域を撮像することにより、撥液膜による薄膜干渉の影響を受けることなく、マークの形成状態を正確に検出することが可能になる。
(もっと読む)
軸振れ計測装置
【課題】 回転軸体の軸線方向および/または当該方向に直角な方向における軸振れ量を非接触にて簡単に測定できる軸振れ計測装置を提供する。
【解決手段】 被計測対象である回転軸体の軸線方向および径方向の軸振れ量をこれらのそれぞれに対応する前記回転軸体の回転方向における光反射距離の変化として検出可能な反射パターンを有する平行ターゲット体および鍔状の直立ターゲット体をそれぞれ当該回転軸体の外周面に設けるとともにこれに外嵌設置しておき、前記回転軸体の回転中に発光部からの光線をいずれか一方の反射パターンに照射してそこを走査することで反射する反射光を光誘導手段を用いて他方の反射パターンに誘導して照射し、そこからの前記2つの反射パターンにてそれぞれ反射した反射光を受光・演算表示部で受光し、受光時間の変化から前記回転軸体の軸線方向および径方向の軸振れを計測する軸振れ計測装置。
(もっと読む)
パラメータ決定支援装置およびパラメータ決定支援プログラム
【課題】計測対象物体を撮像して得られる画像データに対して予め定められたパラメータの組を用いた処理を行うことで処理結果を得る処理装置に設定されるパラメータをより迅速かつ容易に決定できるパラメータ決定支援装置およびパラメータ決定支援プログラムを提供する。
【解決手段】試行された複数のパラメータ候補の各々について、その判定結果および統計的出力が一覧表示されることで、ユーザは、最適なパラメータセットを容易に選択することができる。たとえば、誤検出数がゼロである試行番号「2」,「4」,「5」が安定した処理を行なうことのできるといえ、その中でも、試行番号「2」が最も処理時間が短くて済むので、総合的には、試行番号「2」のパラメータセットが最適であると言える。
(もっと読む)
フィルムの平面性検査装置および平面性検査方法
【課題】フィルムロールの状態のままフィルムの平面性を非接触で且つ瞬時に検査できるフィルムの平面性検査装置および当該検査装置を使用した平面性検査方法を提供する。
【解決手段】平面性検査装置は、フィルムロール8の外周部を走査する走査装置1と、当該走査装置から得られた信号を処理する演算処理装置5とから成る。走査装置1は、レーザー光を照射する発光部2と、遮られなかったレーザー光を受光する受光部3と、受光した光量Fzに応じて数値化信号を出力する信号変換素子4とを含み、かつ、フィルムロール8に対してその軸線と平行に且つ幅方向に沿って相対的に移動可能に構成される。演算処理装置5は、フィルムロール8の外径値およびそれらの平均値を演算し、各外径値と平均値との差を変位量として演算し、正の最大変位量を抽出する。平面性検査方法においては、正の最大変位量と予め設定された基準値とを比較してフィルムの良否を判別する。
(もっと読む)
変位及び傾角測定装置
【課題】レンズ駆動装置などの被測定物の測定工程において、変位量の測定と傾角量の測定とを同時に行うことが可能な変位及び傾角測定装置を提供する。
【解決手段】変位測定用光源11から照射されたP波を、偏光ビームスプリッタ13を透過させて、被測定物50に照射し、被測定物50の表面で反射されたP波の反射光を変位センサ15に入射させて被測定物50の変位量を測定するとともに、偏光ビームスプリッタ13におけるP波の入射方向と直交する方向に配置された傾角測定用光源16から照射されたS波を偏光ビームスプリッタ13で反射させて、被測定物50に照射し、被測定物50の表面で反射されたS波の反射光を傾角センサ19に入射させて被測定物50の傾角量を測定するようにした。
(もっと読む)
突起付長尺体測定方法
【課題】突起付長尺体の外径寸法と谷径寸法及び突起高さ寸法を容易かつ迅速に測定可能な突起付長尺体測定方法を提供する。
【解決手段】多数の突起11を有する突起付長尺体10を軸心L0 方向に走行させ、その長尺体10の軸心L0 を含む一縦断面Sを挟んで反射型二次元変位第1センサ1と反射型二次元変位第2センサ2とを対面状に配設して、第1センサ1によって上記長尺体10の上記一縦断面Sの一方側における第1狭小範囲内を測定すると共に第2センサ2によって長尺体10の一縦断面Sの他方側における第2狭小範囲を測定して、長尺体10の外径寸法と谷径寸法と突起高さ寸法とを演算手段により演算する。
(もっと読む)
高さ測定方法および高さ測定装置
【課題】検出された干渉信号にノイズが含まれる場合であっても、精度良く物体の高さを測定することができる高さ測定方法および高さ測定装置を提供すること。
【解決手段】高さ測定対象である一の物体の上面および所定の参照面に白色光を照射して第一の白色干渉信号を得る段階と、前記一の物体が形成される底面および所定の参照面に白色光を照射して第二の白色干渉信号を得る段階と、前記第一の白色干渉信号に含まれる複数の強度ピークのそれぞれと、前記第二の白色干渉信号に含まれる複数の強度ピークのそれぞれとの間の距離を算出する段階と、前記算出された距離のうち、前記一の物体の高さの測定の直前に行われた所定の個数の物体の高さの計測結果の平均値に最も近い値の距離を選択する段階と、を有し、前記選択された距離を前記一の物体の高さとする。
(もっと読む)
距離測定器及び物体移動速度測定器
【課題】
カメラで撮影した画像内から人物や車両等の特定のオブジェクトを抽出し、該撮影したカメラと該抽出した特定のオブジェクトとの間の距離、または該抽出した特定のオブジェクトの移動方向及び速度を測定する。
【解決手段】
被写体からの光を所定の焦点距離に結像するレンズ群と、該レンズ群からの入射光を光電変換し画像信号を生成する撮像手段と、該画像信号から予め定められた特徴情報を含むオブジェクトを検出し該オブジェクトの一部またはすべてを含む領域の位置情報を生成するオブジェクト抽出手段と、前記画像信号と該位置情報を基に前記オブジェクトの一部またはすべてを含む領域に合焦させるとともに合焦時の焦点距離情報を算出するオートフォーカス手段と、該オートフォーカス手段からの焦点距離情報を基に前記レンズ群から前記オブジェクト抽出手段により抽出したオブジェクトまでの間の距離を算出する距離算出手段とで構成する。
(もっと読む)
接着剤の膜厚測定装置
【課題】ガラス基板と接着剤の屈折率差の大小に依存することなく、接着剤の膜厚を算出することを可能とする。
【解決手段】膜厚測定装置1は、基台11上に設けられるとともに被検物4を載置させるための加熱器12と、被検物4の加熱温度を制御するための加熱制御部14と、被検物4の上方に配置されていて加熱された被検物4の膨張による高さ方向の変化量を測定するためのレーザー変位計13と、被検物4の接着剤3の線膨張係数を入力するための入力部15と、レーザー変位計13により測定した被検物4の高さ方向の変化量、加熱温度、入力部15で入力した接着剤3の線膨張係数に基づいて接着剤3の膜厚を算出する演算部16とを備えている。
(もっと読む)
外径測定装置
【課題】パイプの進入角が搬送方向とずれた場合であっても全周にわたって外径を正しく測定する。
【解決手段】計算機は、パイプの入口に設置されたセンサー41、42の測定値から、入口側の水平方向及び垂直方向のずれの値を、出口側に設置されたセンサー61、62の測定値から、出口側の水平方向及び垂直方向のずれの値を取得する。さらに、パイプの回りを周方向に移動する外径計52から外径の測定値を、ロータリーエンコーダー53から外径計の回転角度の変化を示すパルスの入力を受ける。計算機は、入口側の水平方向及び垂直方向のずれの値からなる入口側の座標と、出口側の水平方向及び垂直方向のずれの値からなる出口側の座標とを、外径計の回転角度だけ回転した座標軸上の座標に変換し、変換された座標と、入口側及び出口側のセンサーの距離とから得られる、パイプの進入角度の余弦を用いて、計測された外径を補正して実外径を算出する。
(もっと読む)
フォーカシング制御装置および非接触測定装置
【課題】測定面からの反射光の光量に影響されることなく、安定したオートフォーカスができるフォーカシング制御装置を提供する。
【解決手段】フォーカスエラー信号Sは、ピンホール方式で生成される。信号生成部9からの出力がフォーカスエラー信号Sか否かの判断では、初めにデフォルトのしきい値として第1しきい値N1および第2しきい値N2が用いられる。この判断でフォーカスエラー信号Sと判断されない場合は、第1しきい値N1を第3しきい値N3に、第2しきい値N2を第4しきい値N4に補正して再度フォーカスエラー信号Sの判断をする前に、信号生成部9からの出力の波形を評価する。
(もっと読む)
厚み測定装置
【課題】手軽に弾性体の厚みを測定することにより、弾性劣化を容易に測定することができる厚み測定装置を提供すること。
【解決手段】発泡体等から構成される被測定物の測定箇所に当接されるように配設し、該被測定物の厚みを測定するための波動センサー部110を備えた厚み測定装置1において、前記波動センサー部110は、発泡体等の測定箇所の密度変化に応じて反射量が変化する光を出射する発光部112と、発光部112から出射され前記発泡体等により反射した光を受光する受光部114と、を有し、前記発泡体等の厚みと、入射された光(輝度)との関係を特性データとして記憶する特性データ152と、受光部114で受光した光から、前記特性データに基づいて前記被測定物の厚みを算出することを特徴とする。
(もっと読む)
測定方法及び測定装置
【課題】被検面としての非球面の形状を高精度に測定する測定方法を提供する。
【解決手段】球面波を形成する光束を用いて非球面を有する被検面を照明し、前記被検面の形状を測定する測定方法であって、球面波の曲率中心が前記非球面の非球面軸上にある状態で前記非球面軸の方向に前記被検面を駆動して複数の位置に順に位置決めし、前記複数の位置のそれぞれにおいて、前記被検面からの光束と参照面からの光束との干渉パターンを検出する第1の検出ステップと、前記複数の位置のそれぞれから前記非球面軸の方向に前記被検面を既知の量だけシフトした複数のシフト位置のそれぞれに位置決めし、前記複数のシフト位置のそれぞれにおいて、前記被検面からの光束と前記参照面からの光束との干渉パターンを検出する第2の検出ステップと、を有することを特徴とする測定方法を提供する。
(もっと読む)
軸体搬送装置とそれを用いた軸体大径部の外径検査装置
【課題】外周に切欠き溝を設けた回転テーブルを用いて軸体の搬送を行う搬送装置で問題となっていた投・受光部或いはそれに変わる投光部とカメラのスペース面での設置規制をなくし、光学的外径測定装置を用いて軸体の大径部の寸法測定や外径の良否判定を行えるようにすることを課題としている。
【解決手段】外周の切欠き溝4に軸体Aの軸部a1を適合して受け入れ、大径部a2を下から支えて軸体Aを搬送する回転テーブル2と外周の固定ガイド3にスリット9,10を設け、そのスリット9,10が、外径測定部7に切欠き溝4が到達したときに平面視においてその切欠き溝4に導入された軸体Aの大径部a2を間に挟んで切欠き溝中心Cを通る直線上で対向し、このスリットに光学的外径測定装置の測定光や照明光を縦向きに通せるようにした。
(もっと読む)
目視検査システム
【課題】目視観察用のモニター装置を用いて、大型基板上の欠陥部位を観察するに当たり、当該部位が該モニター画面上のどこにあるのか容易に認識できる手段及びこの手段を備える目視検査システムを提供する。
【解決手段】自動欠陥検査装置で取得したパターンの欠陥に関する情報を欠陥情報データベースに蓄積する手段と、目視検査装置で取得したパターンの欠陥に関する情報を欠陥情報データベースに蓄積する手段と、蓄積された前記パターンの欠陥に関する情報を目視検査支援システムに備わるモニター装置で閲覧する手段と、被検査基板上に形成されたパターンの撮像映像を目視検査装置に備わるモニター装置に表示する手段と、被検査基板上に形成されたパターンの欠陥部位を、前記欠陥情報データベースに蓄積された情報に基づいて、レーザポインタにより照射する手段と、を備えることを特徴とする目視検査システム。
(もっと読む)
デンドライト傾角測定装置、方法及びプログラム
【課題】デンドライトの傾角の測定の自動化を図り、作業時間を短縮化させるとともに、測定のばらつきをなくす。
【解決手段】デンドライトの傾角の測定を行う観察面であるスラブ100の横断面101の画像データを取り込む画像データ取り込み部1と、画像データ取り込み部101により取り込んだ画像データを2値化する2値化処理部3と、2値化処理部3により2値化した画像データ上で、基準点にデンドライトが存在するか否かを判定して、存在する場合は前記基準点をデンドライトの角度測定中心位置とし、存在しない場合は前記基準点の周囲でデンドライトが存在する位置を探索してデンドライトの角度測定中心位置とする角度測定中心位置探索処理部5と、角度測定中心位置探索処理部5により探索した角度測定中心位置につながるデンドライトを検出し、その傾角を測定する角度測定処理部6とを備える。
(もっと読む)
101 - 120 / 406
[ Back to top ]