
Fターム[2F065SS03]の内容
光学的手段による測長装置 (194,290) | 指示;記録 (4,025) | 指示、記録内容 (1,715) | キャラクター(文字、数字) (406)
Fターム[2F065SS03]に分類される特許
41 - 60 / 406
ホールラフネス定量化装置及びホールラフネス定量化方法
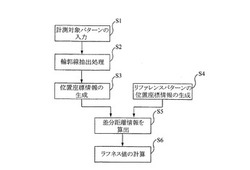
【課題】フォトマスクなどに形成されたホールパターンのラフネスを定量化する際に定量化すべき箇所を人為的に指定したりすることなくラフネスを迅速かつ正確に定量化することのできるホールラフネス定量化装置及びホールラフネス定量化方法を提供する。
【解決手段】計測対象パターンとリファレンスパターンの輪郭線から計測対象パターンのラフネスを定量化する際に、計測対象パターンの輪郭線上に位置する複数点の位置座標とリファレンスパターンの輪郭線上に位置する複数点の位置座標との差分距離を算出し、算出された差分距離に基づいて計測対象パターンのラフネス値を算出する。
(もっと読む)
測定システム及びその校正方法

【課題】 測定物の位置に関わらず、正しい演算結果が得られるように校正する作業を簡略化することができる測定システムを提供する。
【解決手段】 センサ出力から測定値y2を求める子機コントローラ30と、センサ出力から測定値y1を求める親機コントローラ20により構成される。親機コントローラ20は、測定値y1及びy2から測定物の厚さを示す演算値zを求め、第1及び第2校正用測定物の既知の厚さとして、第1及び第2目標値を記憶し、第1校正用測定物から得られた測定値y2を記憶する。そして、第1校正用測定物を測定軸方向に移動させて得られた測定値y2と測定値記憶部24a内の測定値y2との間の変化量に基づいて、測定値y1の校正を実行する。また、第1校正用測定物から算出された第1演算値を記憶し、第1及び第2目標値と第1演算値と第2校正用測定物から算出された第2演算値とに基づいて、演算値zの校正を実行する。
(もっと読む)
カメラ
【課題】被写体が所定の条件を満たしたときには被写体の有する直線部の寸法を測定し寸法測定結果を表示部に表示させ得るカメラを提供する。
【解決手段】被写体像を撮影する撮影部2と、撮影部により取得された画像信号に基く画像及びその関連情報を表示する表示部3と、撮影部により取得された画像のうち第1の方向に延びる第1の直線,第1の直線に対して直交する第2の方向に延びる第2の直線及び第3の直線を検出する直線検出部11b,11cと、第1の直線と上記第2の直線との交点となる第1のポイント,第1の直線と第3の直線との交点となる第2のポイントを検出するポイント検出部11dと、第1のポイントと第2のポイントとの間の距離を測定する測定部11eと、測定部による測定結果を表示部に表示する表示制御部3aとを備える。
(もっと読む)
外形判定装置
【課題】判定時間が短く、かつ、小形化や低コスト化が可能な外形判定装置を提供する。
【解決手段】被判定物を載置する矩形状の載置面3aを有する載置台3と、載置面3aの周縁に設置される、横方向送光用光導波路1Xと、横方向受光用光導波路2Xと、縦方向送光用光導波路1Yと、縦方向受光用光導波路2Yと、載置面3aから上方に起立する高さ方向送光用光導波路1Zと、高さ方向受光用光導波路2Zと、上記縦方向,横方向および高さ方向の送光用光導波路1X,1Y,1Zの送光用光コア22に接続された光源D1と、上記縦方向,横方向および高さ方向の受光用光導波路2X,2Y,2Zの受光用コア23に接続された光電変換素子C1と、この光電変換素子C1からの光遮断信号を受けて演算処理し被判定物の外形を算出する外形算出手段4とを備えている。
(もっと読む)
障害物検知警報装置
【課題】事前校正を必要とせずに路面と障害物とを識別することができる障害物検知警報装置を提供する。
【解決手段】車載カメラ1による撮像画像に基づいて、撮像画像の各画素に、2次元座標と各画素に対応する被写体の部分から車載カメラ1までの距離とを対応付け、2次元座標と距離とからなる距離マップを作成する距離マップ作成手段6と、距離マップに基づいて、被写体の部分のうち路面に相当する平面Gを特定する路面特定手段7と、を有することにより、路面に相当する平面Gは、従来のように予め用意された3次元位置が既知の多数点から特定されるわけではなく、撮像画像に基づいて特定されるため、従来のような事前校正を必要とせずに路面と障害物とを識別することができる。
(もっと読む)
形状測定装置および該方法
【課題】本発明は、測定対象物の表面形状をより高い精度で測定することができる形状測定装置および形状測定方法を提供する。
【解決手段】本発明の形状測定装置Sは、光へテロダイン干渉を行う一面側測定部2および他面側測定部3によって測定対象物WAの厚さを測定するものであって、一面側測定部2が測定対象物に複数の測定光を照射することで、1回の測定で測定対象物WAにおける厚さと表面形状とを測定する。
(もっと読む)
内視鏡装置
【課題】観察対象物と内視鏡遠位端部との距離を表示することが可能な内視鏡装置を得る。
【解決手段】初期設定装置は、内視鏡スコープ20の遠位端部21を固定する固定部51と、ターゲット52と、固定部51及びターゲット52が取り付けられる基部53とを主に備える。遠位端部21からターゲット52までの距離がxiであるとき、レーザ輝点Liがターゲット52上に現れ、遠位端部21からターゲット52までの距離がxiiであるとき、レーザ輝点Liiがターゲット52上に現れ、遠位端部21からターゲット52までの距離がxiiiであるとき、レーザ輝点Liiiがターゲット52上に現れる。画像におけるターゲット52の中心点Pから輝点の中心までの距離を用いて、遠位端部21の先端からターゲット52までの距離を測定する。
(もっと読む)
変位計測装置、変位計測方法、及び変位計測プログラム
【課題】地滑りのように広範囲で変位特徴点が多数となり得る変位計測において、作業効率及び精度の向上を図る。
【解決手段】観測対象領域の地形データをウェーブレット変換して起伏特徴画像を生成する(S42)。地滑り前後の地形データそれぞれから生成される起伏特徴画像についてパターンマッチングを行い、観測対象領域内に設定された変位追跡点の起伏特徴画像上での対応点を追跡する(S44)。起伏特徴画像上での対応点の位置、及び地形データの高さ情報に基づいて、変位追跡点の三次元座標を求める(S48)。各時刻での変位追跡点の三次元座標に基づいて変位追跡点の三次元変位ベクトルを求める(S50)。
(もっと読む)
欠陥検査装置、及び欠陥情報管理方法
【課題】被検査基板における欠陥発生状況の把握を妨げることなく、管理すべき欠陥データ量を抑制できる欠陥検査装置の提供。
【解決手段】欠陥検査装置は、撮像装置が生成した被検査基板面の被検査画像データを取得する手段と、被検査画像データと基準画像データとを比較して欠陥部を検出する手段と、検出された欠陥部の位置座標を少なくとも含む欠陥データを生成する手段と、区画基準領域データ及び前記位置座標に基づいてそれの各領域に存在する欠陥部の個数を算出する手段と、各領域の欠陥部の個数と各領域の許容値とを比較して欠陥部密集領域を検出する手段と、欠陥部密集領域における各欠陥部の欠陥データを、その領域に対して予め定められた領域位置データに置換する手段と、領域位置データと置換されなかった欠陥部の欠陥データとを管理サーバへ送信する手段とを備える。
(もっと読む)
被写体寸法測定用カメラ装置
【課題】 本発明は、電子カメラで被写体や現場状況の撮像を行いながら被写体をズームアウト(縮小)したり、ズームイン(拡大)したりして撮像しても正確にかつ簡便に被写体の大きさや寸法を測定する装置および方法の提供を課題とする。
【解決手段】 被写体寸法の測定または比較機能付カメラ装置において、複数のビーム光源と、該複数のビーム光源は前記カメラの光軸と並行して発光ビームを照射するよう所定距離だけ離間して前記カメラに装着されていることを特徴とする。
(もっと読む)
形状測定装置
【課題】被検物の三次元形状を測定する際に必要なメモリの容量を効率的に削減する。
【解決手段】形状測定装置において、ステップS5において、スポット光の照射位置が変化したと判定され、ステップS6において、過去にデータセットを記録した照射位置でないと判定された場合、測定データ、中間データおよび測定用画像データを含むデータセットを記録する。また、スポット光の照射位置が変化したか否かに関わらず、ステップS7において、現在のスポット光の照射位置でまだN回データセットを記録していないと判定された場合、データセットを記録し、すでにN回データセットを記録していると判定された場合、データセットを記録しない。本発明は、例えば、三次元形状測定装置に適用できる。
(もっと読む)
画像測定機
【課題】表示手段に表示された各要素の間の距離を容易に把握することができる画像測定機の提供。
【解決手段】画像測定機1は、撮像装置2と、制御装置3とを備える。制御装置3は、制御装置本体4と、表示手段5と、操作手段6とを備える。制御装置本体4は、撮像装置2にて撮像される被測定物の画像に基づいて、測定対象となる複数の要素の情報を取得する要素情報取得部41と、要素情報取得部41にて取得される各要素の情報に基づいて、各要素の画像を表示手段5に表示させる要素画像表示部42と、操作手段6を介して各要素の画像における複数の要素が選択されると、選択された各要素を指定要素として設定する指定要素設定部44と、指定要素設定部44にて設定される各指定要素の間の距離を寸法線、及び寸法補助線で表示手段5に表示させる距離表示部46とを備える。
(もっと読む)
画像測定機
【課題】表示手段に表示される各要素の画像に基づいて、多数の要素を容易に指定することができる画像測定機の提供。
【解決手段】画像測定機1は、撮像装置2と、制御装置3とを備える。制御装置3は、制御装置本体4と、表示手段5と、操作手段6とを備える。制御装置本体4は、撮像装置2にて撮像される被測定物の画像に基づいて、測定対象となる複数の要素の情報を取得する要素情報取得部41と、要素情報取得部41にて取得される各要素の情報に基づいて、各要素の画像を表示手段5に表示させる要素画像表示部42と、操作手段6を介して各要素の画像における所定の範囲が選択されると、所定の範囲に含まれる各要素を指定要素として設定する指定要素設定部44とを備え、指定要素設定部44にて設定される各指定要素に基づいて被測定物を測定する。
(もっと読む)
画像表示装置
【課題】 投射レンズの光軸と、スクリーンの法線の傾きを精度よく検出し、調整者にわかりやすく傾き情報を伝達することができる画像表示装置を得ること。
【解決手段】 画像表示素子と、該画像表示素子により表示された画像をスクリーン上に投射する投射レンズと、該スクリーン上あるいは該スクリーンと同一平面上であって、該投射レンズの光軸と直交する第1方向で該投射レンズの光軸を挟んだ2つの測距点と、該投射レンズの光軸と直交し、該第1方向と直交する第2方向において、前記2つの測距点とは位置が異なる1つの測距点の、少なくとも3つの測距点の距離情報を各々検出する少なくとも3つの距離測定手段と、該3つの距離測定手段で得られる距離情報を表示する表示手段とを備えた画像表示装置であって、該3つの距離測定手段の光軸は、該投射レンズの光軸に対して、同じ角度だけ異なる方向に傾けて配置されていること。
(もっと読む)
操作入力装置
【課題】姿勢検出用センサがなくとも、操作入力装置の姿勢を変化させることによる操作入力を実現できる操作入力装置を提供する。
【解決手段】ユーザが手で把持して使用する操作入力装置であって、当該操作入力装置に設けられた撮像部によって撮像される撮像画像を取得し、取得される撮像画像の解析結果に基づいて、当該操作入力装置の姿勢を検出する操作入力装置である。
(もっと読む)
多層膜の膜厚測定方法およびその装置
【課題】多層膜に光を照射してその反射光から光学膜厚を測定し、この光学膜厚から物理膜厚を演算する構成の膜厚計では、測定対象の多層膜や測定する光学膜厚が異なると、光学膜厚と物理膜厚の関係式も異なる。このため、測定に特別な知識が必要になり、また測定対象が変わると新しい関係式を設定するために改造が必要になるという課題を解決する。
【解決手段】測定した光学膜厚と各層の物理膜厚をベクトルと考え、多層膜を構成する各層の屈折率を入力して、この屈折率を用いて光学膜厚から物理膜厚を演算する係数行列を算出し、この係数行列と測定した光学膜厚から物理膜厚を演算するようにした。多層膜の構成や光学膜厚に依存しない汎用的な手法で物理膜厚を演算できるので、特別な知識や機器の改造がなくても、新しい多層膜の測定ができる。
(もっと読む)
距離測定装置、距離測定方法、距離測定プログラム、およびコンピュータ読み取り可能な記録媒体
【課題】ワーク表面に発生したプローブの二次像とプローブの先端部との位置関係から、プローブの先端部とワーク表面との距離を測定する距離測定装置を提供する。
【解決手段】LEDランプ7からプローブ6に光を照射することによりワーク9の表面に現れる二次像とプローブ6とを撮像した画像において、プローブ6のエッジを特定するエッジ特定部101と、二次像の外縁に沿った直線を画像上に挿入する直線挿入部102と、上記エッジと上記直線との重なりを判定する重なり判定部103と、を備え、1以上のLEDランプ7、撮像装置、及びプローブ6が、ワーク9の表面に対して一体に移動可能に保持されている。それゆえ、距離測定装置100は、ワーク9の表面に発生したプローブ6の二次像とプローブ6のエッジとの位置関係から、プローブ6のエッジとワーク9の表面との距離を測定することができる。
(もっと読む)
二面の平行度を測定する方法及びそれに用いる反射部材
【課題】向かい合う二面の平行度あるいは角度を秒オーダの精度で安価、かつ簡易に測定できる二面の平行度を測定する方法とそれに用いる反射部材を提供する。
【解決手段】反射部材としてのビームスプリッタ71の第2面9を上部ミラー5に向け、第3面11を下部ミラー6に向けて配置し、第1面8に入射光ビーム24を入射し、該第1面8からの第1反射ビーム25と、該上部ミラー5で反射し該第1面8を透過して戻ってくる第2反射ビーム26との乖離度を測定する。次に、該第1面8を該下部ミラー6に接して配置し、該第2面9に垂直な方向から該入射光ビーム24を入射し、該第2面9から反射される第3反射ビームと、該入射光ビーム24が該第2面9を透過し、さらに該下部ミラー6で反射し該第2面9を透過して戻ってくる第4反射ビームとの乖離度を測定する。該二つの乖離度から、該上部ミラー5と該下部ミラー6との平行性を計算する。
(もっと読む)
可動軸の位置管理装置
【課題】安価かつ簡単な構成でありながら、可動軸の位置・姿勢を精度良く管理することができる位置管理装置を提供する。
【解決手段】可動軸の位置管理装置20は、光束BLを照射する投光手段21と、光束BLを拡散反射させる反射手段22と、反射光を受光してその光量を出力する受光手段23と、受光手段23からの出力値に基づいて、基準位置からのツール12のズレ量を検出する検出手段としてのセンサアンプとを備える。投光手段21は、静止体としての架台6に取付けられ、反射手段22及び受光手段23は、複数の可動軸を連結して構成されるロボットアーム11先端に設けたツール12に取付けられる。
(もっと読む)
寸法検査システム及び寸法検査方法
【課題】CCDカメラを用いた寸法検査において、被測定材が所望の値であるか否かを効率よく且つ精度よく行うこと。
【解決手段】金属鋼板を切断するための切断情報を入力する切断情報入力装置と、前記切断情報に応じて前記金属鋼板を切断して被測定材とする切断装置と、前記被測定材を載置する載置面、前記載置面上の前記被測定材の端部位置を認識するCCDカメラ、前記端部位置から前記被測定材の寸法の測定情報を得る測定手段、前記測定情報と前記切断情報とを比較する比較手段、前記比較手段により比較結果を表示する表示手段、を具備する寸法検査装置と、を有することを特徴とする。
(もっと読む)
41 - 60 / 406
[ Back to top ]