
Fターム[2F065SS03]の内容
光学的手段による測長装置 (194,290) | 指示;記録 (4,025) | 指示、記録内容 (1,715) | キャラクター(文字、数字) (406)
Fターム[2F065SS03]に分類される特許
21 - 40 / 406
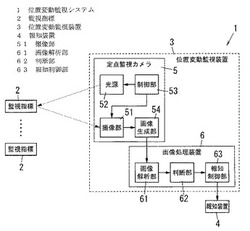
位置変動監視装置およびこれを含む位置変動監視システム
【課題】監視対象領域の位置変動の測定精度を高める。
【解決手段】位置変動監視システム1は、予め決められた監視対象領域に設置された複数の監視指標2と、複数の監視指標2が撮像された撮像画像を用いて監視対象領域の位置変動を検出する位置変動監視装置3とを備える。位置変動監視装置3は、複数の監視指標2を予め設定された時間間隔で撮像する撮像部51と、撮像部51により時系列で得られる撮像画像を用いて複数の監視指標2の位置変位を求める画像解析部61と、複数の監視指標2の位置変位があった場合に警告を報知するように報知装置4を制御する報知制御部63とを備える。
(もっと読む)
工具寸法の測定方法及び測定装置、並びに工作機械

【課題】ワークの加工精度をより一層向上させることができる工具寸法の測定方法及び測定装置、並びに工作機械を提供する。
【解決手段】工作機械において、撮像装置は、送り方向に移動中の工具を撮像する。撮像に基づき生成された複数の画像データの各々で輪郭線51が特定される。この輪郭線51に基づき工具の移動軌跡52及び中心軸線53が特定される。移動軌跡52と中心軸線53との間にずれがある場合には、そうしたずれは工作機械で工具の位置決めの補正に用いられることが可能である。その結果、ワークの加工精度は向上する。また、例えば傾斜姿勢の工具の寸法が測定されれば、傾斜姿勢における実際の刃先位置や工具径が特定されることが可能である。こうした刃先位置や工具径は工作機械の位置決めの補正に用いられることが可能である。ワークの加工精度はさらに向上する。
(もっと読む)
変位センサシステムに適用する拡張ユニット
【課題】センサシステムを構成するアンプユニットから時系列的に得られる計測データに対して所望の解析処理を適用し、その解析結果に対応する出力を生成することが可能なセンサシステムに適用される拡張ユニットを提供すること。
【解決手段】アンプユニットに連装される拡張ユニットには、計測データ蓄積メモリと、伝送ラインを介して到来する計測データを取得して前記メモリに蓄積する計測データ取得手段と、蓄積された一連の計測データを所定のアルゴリズムに従って解析するデータ解析手段と、データ解析結果を判定する判定手段と、判定結果に対応する制御信号を外部へと出力する出力手段とを具備する。計測アルゴリズムが部品化された複数の処理プログラムが拡張ユニットに組み込まれており、パソコンからの指示に従って、処理プログラムが選択され、選択された処理プログラムが所定の順序で実行される。
(もっと読む)
調整方法
【課題】簡単な構成で容易に撮像面の傾斜状態を検出可能な傾斜検出方法を提供する。
【解決手段】2つの撮像装置のそれぞれについて、撮像装置の傾斜状態を検出する傾斜検出工程と、撮像装置の傾斜を調整する傾斜調整工程と、撮像装置の位置を検出する位置検出工程と、撮像装置の位置を調整する位置調整工程と、を有し、傾斜検出工程は、均等間隔で設けられたパターンを、撮像装置の焦点位置を順次変化させて撮像し、撮像画像におけるパターン位置を検出してパターン領域を設定し、パターン領域における各画素の輝度値を検出し、検査方向に沿って画素間の輝度変化量を算出し、各パターン領域における輝度変化量の積算値を算出し、積算値が最大となる撮像画像に対応した焦点一致位置を検出し、焦点一致位置に基づいて、撮像装置の傾斜状態を検出することを特徴とする調整方法。
(もっと読む)
ダム堤体の変位測定装置および変位測定方法
【課題】ダムの堤体に配置したワイヤの水平方向および鉛直方向の変位を検出でき、ダム堤体の変位を精度良く検出できるダム堤体の変位測定装置を提供すること。
【解決手段】ダム堤体の変位測定装置1は、堤体内部に鉛直に配置された測定ワイヤ2と、測定ワイヤ2に固定された金属球20と、金属球20を撮影する2台のカメラ21,22および照明装置23,24と、各カメラ21,22で撮影された画像を処理する画像処理装置30とを備える。カメラ21,22は、レンズの光軸が水平面内で互いに直交する位置に配置する。画像処理装置30は、撮影画像データから金属球20を認識して重心位置を検出し、その重心位置の変位によって、ダム堤体の変位を測定する。金属球20を2台のカメラ21,22で撮影して重心位置を検出しているので、金属球20の三次元方向の変位量を測定でき、ダム堤体の変位を精度良く検出できる。
(もっと読む)
亀裂開口幅と亀裂形状の同時測定方法及び装置
【課題】岩石試料内の単一天然亀裂の開口幅と形状の両方を高い分解能で且つ高精度で同時に測定でき、測定に際して岩石試料が消失することなく、測定に要する時間とコストの負担を軽減できるようにする。
【解決手段】単一亀裂を有する岩石試料を型として、亀裂を境とする2つの透明レプリカ試料14a,14bを、一方は無色の透明樹脂で、他方は染料で着色した透明樹脂で作製し、両者を組み合わせることで亀裂12を復元し、亀裂内に前記染料とは異なる色の染料溶液を満たして岩石レプリカ試験体10とする。それに白色光を照射し、透過光を各染料に対応したバンドパスフィルター20を通して各色毎の2次元平面座標の光強度データをCCDカメラ18で取得し、各色毎の2次元平面座標の吸光度から2種類の染料で着色された部分の厚さをデータ収録装置22で算出して亀裂開口幅と亀裂形状を同時に求める。
(もっと読む)
形状測定装置
【課題】精度の高い測定結果を得る。
【解決手段】広帯域スペクトルを有する光源からの光を被測定対象と参照面とに導きその光路長差により干渉光強度分布画像を生成する光学系と、干渉光強度分布画像を撮像する撮像手段と、光路長差を変化させる光路長差変更手段と、干渉光強度分布画像から各測定位置における光軸方向の位置を求める演算手段とを備える。演算手段は、複数の信号発生手段と、その出力信号に重み付けをして出力する重み付け手段と、周期信号を加算して検出信号として出力する第1の信号加算手段と、直流信号と検出信号とを加算する第2の信号加算手段と、干渉強度列から第2の信号加算手段の出力を減算して誤差信号を出力する信号減算手段と、誤差信号から重み付け手段の重みを調整する適応アルゴリズム部とを有する適応信号処理ブロックと、検出信号のピーク位置を検出するピーク検出ブロックとを有する。
(もっと読む)
寸法測定装置、寸法測定方法及び寸法測定装置用のプログラム
【課題】 複数のワークについて、相対的な位置関係を把握し易く、測定結果を容易に識別することができる寸法測定装置を提供する。
【解決手段】 特徴量情報、測定対象箇所情報及び設定値情報を保持する測定設定データ記憶部21と、ワークの位置及び姿勢をそれぞれ検出する配置状態検出部24と、ワーク画像A1から測定対象箇所のエッジを抽出するエッジ抽出部24と、抽出されたエッジに基づいて測定対象箇所の寸法値を算出し、測定対象箇所及びワークの良否判定を行う良否判定部25と、ワークの良否判定の結果をワーク画像A1上に表示する測定結果表示手段と、ワークのいずれかを選択するためのワーク選択部27により構成される。測定結果表示部26は、選択されたワークについて、測定対象箇所の良否判定の結果を表示する。
(もっと読む)
画像計測方法及び画像計測装置
【課題】簡単な作業で、大型構造物の計測ができる画像計測方法及び画像計測装置を提供する。
【解決手段】計測対象物である圧力容器100をカメラ2で撮像して撮像画像を取得し、その撮像画像をカメラパラメータに基づいて補正し、補正した計測用画像から計測対象であるボルト孔101と同一平面上に存在する基準円150を抽出し、その基準円150からカメラ2の撮像位置を推定し、上記計測用画像から2つのボルト孔101を検出して、この検出した情報と撮像位置の情報に基づいて、2つのボルト孔101間の距離を算出する。
(もっと読む)
電線の異常検出方法、異常検出装置、および異常検出プログラム
【課題】例えば自走式電線点検装置を使用したビデオ映像に適した処理を行う。
【解決手段】撚られた複数の素線が表面に露出している電線に沿って撮像手段を移動させながら撮影した電線の複数の連続画像に基づいて電線の異常を検出する異常検出方法において、複数の連続画像4のうち、1枚の基準画像中の基準となる素線境界の位置情報及び素線の幅情報の入力を受け付け記憶する初期値設定処理(ステップS43)と、連続画像の各々について素線の境界を検出して素線表面画像を切り出す画像切り出し処理(ステップS44,S45)と、素線表面画像中の素線の表面の明るさの変化に基づいて素線の異常を検出する異常検出処理(ステップS46〜S48)を備えている。
(もっと読む)
可動式ホーム柵測定装置及び測定方法
【課題】必要とする測定点の抽出及び可動式ホーム柵の測定が可能となり、信頼性が高く、しかも、安全で高能率な測定作業を行うことができる可動式ホーム柵測定技術を提供する。
【解決手段】離れ測定手段によって測定された測定データの変化量が閾値より大きい場合に、台車上の柵本体頂部及び支障物センサボックス頂部を測定することができる位置に設置された上部非接触位置センサにより、軌道と直交する方向の縦断プロファイルを測定し、上部非接触位置センサによって測定された測定データの変化量から支障物センサボックス設置箇所であると判定した場合に、柵本体頂部の離れと支障物センサボックス頂部の高さと離れ、支障物センサボックス下部の離れをそれぞれ求める。
(もっと読む)
点検システム
【課題】 安価で正確に点検することができるシステムを提供する。
【解決手段】
点検システムは、遠隔操作されるロボット1(移動体)と、ロボット1に設置されたビデオカメラ15と、ロボットから離れて配されるディスプレイ22とを備えている。ロボット1には、第1、第2のレーザービームLBL,LBRを同一平面Pに沿って平行に発射する第1、第2のレーザーポインタ18L、18R(レーザー発射器)が設けられている。第1、第2の指標画像ZL,ZRがディスプレイ22に表示される。ユーザーは、第1、第2のレーザービーム像TL、TRが、第1、第2の指標画像ZL,ZRに入るようにロボット1を遠隔操作し、これにより、ビデオカメラ15の光軸15aと第1、第2レーザービームLBL,LBRを平坦な対象面と直交させる。
(もっと読む)
麺測定器
【目的】種々の麺類の太さを麺に対して非接触状態で計測することができ、且つ麺の太さが合格基準範囲内に収まっているか否かを瞬時に判定することができる麺測定器を提供すること。
【構成】 サンプル麺Mの長さ方向の一端を挟持固定する上部クランプAと、前記麺の他端を挟持固定する下部クランプBと、前記上部クランプAと前記下部クランプBとを結ぶ仮想線Lvに対して交差する光を発するセンサ8と、該センサ8よる麺の太さを数値表示する表示部83とからなること。前記上部クランプAと前記下部クランプBは水平面を同一角度回動自在とすること。
(もっと読む)
電子機器
【課題】被写体までの正確な距離を検出することができない場合においても被写体の実寸法を測定することができる電子機器を提供する。
【解決手段】被写体の周囲の一部の領域を少なくとも含む領域に対してスケール画像を投影する投影部14と、前記投影部により前記スケール画像を投影した状態で前記被写体を撮像する撮像部8とを備える。
(もっと読む)
レーザー距離計付き撮影装置
【課題】レーザー距離計を簡単な構造の取り付け器具によりアクセサリーシューを有する撮影機材(デジタルカメラ)に一体的に取り付ける。
【解決手段】被写体Hを撮影レンズ12により撮影した被写体像を結像して被写体像のデジタル画像データを出力する撮像素子13を内蔵した撮影機材(デジタルカメラ)10と、デジタルカメラ10から被写体Hまでの距離を測定するレーザー距離計20と、デジタルカメラ10のアクセサリーシュー16に着脱されるシュー着脱部材32が基板31の一面(下面)31aに突出して設けられ且つレーザー距離計20を載置する載置部30b1が一面(下面)31aとは反対側の他面(上面)31bに形成された取り付け器具30と、を備えたレーザー距離計付き撮影装置1を提供する。
(もっと読む)
画像測定機、プログラム、及び画像測定機のティーチング方法
【課題】ティーチング操作の作業性や効率を向上させる。
【解決手段】ワークの閉領域情報を有するガーバーデータを記憶するデータ記憶部131と、ガーバーデータの閉領域情報に基づくパターン画像を表示する表示部4と、パターン画像に重ねて、検出すべきエッジ位置、検出方向及び検出長さを指定する検出ツールSを表示部4に表示させる検出指定情報表示プログラム133と、ワークの検出ツールSに対応する領域を撮像する撮像プログラム134及び撮像部3と、撮像された画像のデータに対して、検出ツールSにより指定された検出方向及び検出長さで検出すべきエッジ位置のエッジ検出を行うエッジ検出プログラム141と、エッジ検出を行う場合、検出方向に沿って画像が明部から暗部に変化するか又は暗部から明部に変化するかを示す明暗変化条件を、ガーバーデータを用いて決定する条件決定プログラム140と、を備える。
(もっと読む)
電子カメラ
【構成】イメージセンサ16は被写界を捉える撮像面を有し被写界像を出力し、LCDドライバ26およびLCDモニタ28はイメージセンサ16から出力された被写界像をモニタ画面に表示する。基準物体検出回路36は既定方向において第1既定サイズを有する基準物体を表す物体像をイメージセンサ16から出力された被写界像から探索し、CPU40は、発見された物体像のサイズを基準サイズとして測定する。グラフィックジェネレータ34は既定方向において第2既定サイズを定義する基準画像を基準物体検出回路36の探索処理に関連してモニタ画面に表示し、CPU40は表示された基準画像を基準物体の位置で光軸に直交する平面に仮想的に投影した仮想投影画像のサイズを基準サイズと第1既定サイズと第2既定サイズとに基づいて算出する。
【効果】所望の物体のサイズを簡便に測定することができる。
(もっと読む)
ウエハ反り量測定方法及び測定装置
【課題】安価で狭い視野のレンズ系でウエハの反りを測定可能にする。
【解決手段】ウエハ10を回転テーブル12上で回転させながら、レーザー距離計28によりウエハ10のエッジとレーザー距離計28との距離を非接触で測定する。次に、この距離の最大値と最小値との差をウエハ10の反り量として計算する。これにより、従来の測定方法のようにウエハ10の全面を測定することなく、ウエハ10の反り量を測定する。
(もっと読む)
基板外観検査装置および基板外観検査方法
【課題】基板の反りに起因する検査対象部の位置ずれを簡易に測定して補正することができる基板外観検査装置および基板外観検査方法を提供する。
【解決手段】本発明の基板外観検査装置1は、基板に反りが生じていない場合に撮影手段(カメラ11)の視野内の基準となる位置に基準パターンが位置するように設定された相対位置において、撮影手段により、基板の反りに起因する基準パターンの位置ずれ量を測定するための基準位置ずれ量測定用画像を取得し、当該画像内における基準パターンの位置と基準となる位置との距離を基準位置ずれ量として測定する基準位置ずれ量測定手段(基準位置ずれ量測定部26)と、基準位置ずれ量および基準パターンの基板上の位置に基づいて基板の反り起因する検査対象部の位置ずれ量を推定し、相対位置を当該位置ずれ量分補正する相対位置補正手段(補正座標算出手段27)と、を備えることを特徴とする。
(もっと読む)
ホールラフネス定量化装置及びホールラフネス定量化方法
【課題】フォトマスクなどに形成されたホールパターンのラフネスを定量化する際に定量化すべき箇所を人為的に指定したりすることなくラフネスを迅速かつ正確に定量化することのできるホールラフネス定量化装置及びホールラフネス定量化方法を提供する。
【解決手段】計測対象パターンとリファレンスパターンの輪郭線から計測対象パターンのラフネスを定量化する際に、計測対象パターンの輪郭線上に位置する複数点の位置座標とリファレンスパターンの輪郭線上に位置する複数点の位置座標との差分距離を算出し、算出された差分距離に基づいて計測対象パターンのラフネス値を算出する。
(もっと読む)
21 - 40 / 406
[ Back to top ]