
Fターム[2F065SS03]の内容
光学的手段による測長装置 (194,290) | 指示;記録 (4,025) | 指示、記録内容 (1,715) | キャラクター(文字、数字) (406)
Fターム[2F065SS03]に分類される特許
81 - 100 / 406
レーザ変位計

【課題】被測定膜の厚さを簡便に測定可能とするレーザ変位計を提供する。
【解決手段】レーザ変位計は、波長可変レーザ光源11と、軸上色収差光学系13と、被測定膜SAの表面及び裏面にて反射されたレーザ光を軸上色収差光学系13を介して受光してレーザ光の被測定膜SAの表面及び裏面上での結像状態を検出する光検出部14と、波長可変レーザ光源を制御して出力されるレーザ光の波長を変化させる制御部21とを備える。制御部21は、光検出部14により被測定膜SAの表面及び裏面上でのレーザ光の合焦が検出された場合におけるレーザ光の波長に基づき被測定膜SAの表面位置hs及び仮の裏面位置hbdを求め、表面位置hs及び仮の裏面位置hbdから被測定膜SAの仮の厚さTdを特定する。制御部21は、被測定膜SAの膜種、仮の裏面位置hbd、仮の厚さTdに基づき被測定膜SAの真の厚さを特定する。
(もっと読む)
大規模カメラネットワークの較正
本開示は、複数のノード(12)を含み、各ノードは、指向性を有するセンサ(18)と、通信モジュール(14)と、指向性を有するセンサ(18)から較正オブジェクト(20)のローカルな測定値を受信し、通信モジュール(14)を介して近傍ノード(12)から較正オブジェクト(20)の追加的な測定値を受信し、ローカルな及び追加的な測定値に応じて較正パラメータの初期集合を推定し、通信モジュール(14)を介して近傍ノード(12)から較正パラメータの追加的なセットを受信し、較正パラメータの追加的な集合に応じて較正パラメータの更新された集合を再帰的に推定するよう構成されたプロセッサ(16)とを有する、センサネットワーク(10)に関する。カメラノード(12)の大規模ネットワーク(10)を構成する更なるシステム及び方法が開示されている。 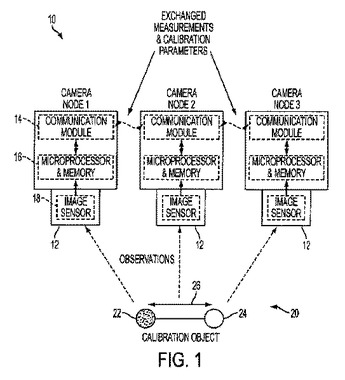 (もっと読む)
(もっと読む)
角度測定装置

【課題】被測定物の角度の測定に際し、測定精度を高めることができるようにする。
【解決手段】ロータリエンコーダ41は、十字線などのレチクル42と機械的に連動して回転するように構成され、レチクル42が回転操作されると、その回転操作に応じたパルス信号を出力する。CPU31は、そのパルス信号から回転角度を算出し、その回転角度に応じた補正値を、補正テーブル保持部34の補正テーブル34aから取得し、その補正値を用いて回転角度を補正する。そして、カウント表示部33は、補正後の正確な回転角度を表示する。本発明は、例えば、顕微鏡用のデジタルプロトラクタに適用できる。
(もっと読む)
形状測定方法
【課題】被測定物の場所によって面の反射状態が異なる場合にも反射光を受光して面の位置が測定できる方法を提供する。
【解決手段】被測定物の形状を測定する形状測定方法にかかわる。投光器から被測定物に光を照射し、被測定物から反射される反射光を受光器が受光するときの光の輝度を推定した受光推定輝度を演算するステップS1の受光輝度推定工程と、被測定物に光を照射し、光が照射された場所を検出するステップS11の照射場所検出工程と、被測定物に光を照射する場所を移動するステップS3の移動工程と、を有し、ステップS11の照射場所検出工程は、受光器が受光する光の輝度に応じた信号を出力し、前記信号を用いて光が照射された場所を検出するステップS5の光検出工程と、受光推定輝度を用いて、受光器が受光する光の輝度を調整するステップS4の受光調整工程と、を有する。
(もっと読む)
形状検査装置,形状検査方法
【課題】ディスク部材について,表裏各面と端面を形成するチャンファ部との境界部分において突起した形状欠陥を検出することができること。
【解決手段】1つの平面内の複数の位置各々に配置された複数のLED12からディスク基板1の測定部位Pに対し,順次異なる照射角度で光を照射し,その照射ごとに,計算機30により,測定部位Pからの反射光の像のカメラ20R,20Lで撮像し,さらに,計算機30により,各LED12に対応した撮像画像と光の照射角度φとに基づいて,測定部位Pの表面角度の分布を算出し,表面角度の変化が許容範囲内か否かの判別により表面形状の良否を判別し,表面形状の画像を,形状不良部分を明示しつつ画像表示装置に表示させる。
(もっと読む)
物体認識方法
【課題】精度良くワークの位置を検出する方法を提供する。
【解決手段】第1パターンが形成された容器上に第1パターンの内側を目標にして四角板を配置するワーク配置工程と、第1パターンと四角板とを撮像して画像データ47を取得する撮像工程と、画像データ47における第1パターン像49と四角板像48との相対位置を分析して四角板の姿勢を認識するワーク認識工程と、を有する。そして、第1パターンは四角板の外形形状を囲むパターンに形成されている。
(もっと読む)
測定装置、露光装置及びデバイスの製造方法
【課題】スケールの位置が基準位置からずれている場合であっても、被測定体(例えば、ステージ)の位置を高精度に測定することができる測定装置を提供する。
【解決手段】いずれか一方が被測定体に設けられるスケール及びセンサを備え、前記スケールを前記センサで読み取ることで前記被測定体の位置を測定する測定装置であって、基準位置からの前記スケールのずれ量を検出する検出部と、前記検出部によって検出された前記基準位置からの前記スケールのずれ量に基づいて、前記スケールを前記センサで読み取ることで測定された前記被測定体の位置を補正する演算部と、を有することを特徴とする測定装置を提供する。
(もっと読む)
帯状体の表面検査装置、表面検査方法及びプログラム
【課題】搬送中の鋼板等の帯状体のエッジ部に発生する歪のような緩やかな形状欠陥及び表面疵を検査し、高い精度でトリム代を設定できるようにする。
【解決手段】搬送される帯状体エッジ部の形状を表す形状画像から、帯状体の幅方向各位置において、予め設定された間隔で帯状体の長手方向に沿っての急峻度最大値を求め、幅方向各位置と長手方向急峻度最大値との関係である最大急峻度プロフィールを生成し、該最大急峻度プロフィールから、該長手方向急峻度最大値が予め設定された閾値と等しくなる幅方向位置を形状欠陥幅として算出する形状欠陥幅算出部507と、エッジ部の輝度画像から有害表面疵を検出し、エッジからの幅方向距離の最大値である表面疵幅を算出する表面疵幅算出部511と、前記形状欠陥幅と前記表面疵幅とを比較して、エッジ欠陥切除位置を出力するエッジ欠陥切除位置出力部512とを備える。
(もっと読む)
膜厚測定方法、膜厚測定装置および該膜厚測定装置を有する画像形成装置、並びに光導電性感光体の製造方法および光導電性感光体
【課題】光導電性感光体におけるフィラー微粒子を分散させた表面層の膜厚及びフィラー微粒子を分散させた表面層を含む感光層の膜厚を、同時に且つ精度良く確実に測定すること。
【解決手段】中間層及び感光層を有し、感光層の所定厚さ部分が表面層として形成された光導電性感光体の膜厚を測定する際に、光源からの光を光導電性感光体に垂直入射し、表面層表面において反射した第1の反射光と、中間層表面において反射した第2の反射光とが干渉した第1の干渉光、及び、第1の反射光と、入射光の中で表面層の中間層側の面において反射した第3の反射光とが干渉した第2の干渉光を、分光手段に導いて分光し、分光した分光スペクトル強度から反射率を演算する際に、反射率を任意の大きさに拡大することにより干渉波形を求め、干渉波形の低周波成分に基づき表面層の膜厚を演算算出し、干渉波形の高周波成分に基づき感光層の膜厚を演算算出することを特徴とする。
(もっと読む)
外観検査用照明装置および外観検査装置
【課題】三次元画像および二次元画像を用いた複数種類の外観検査に対応しつつ外観検査に要する手間やコストを低減する上で有利な外観検査用照明装置および外観検査装置を提供する。
【解決手段】外観検査用照明装置16は、透過性反射板32と、カバー34と、フレーム36と、第1の光源部38、第2の光源部40、第3の光源部42、第4の光源部44を含む。第1、第2、第3の光源部38、40、42から発せされた光は、透過性反射板32を透過して被検査物2を通る仮想平面に対して第1、第2、第3の角度θ1、θ2、θ3で交差して被検査物2を照射する。第4の光源部44から発せられた光は透過性反射板32の下面3206で拡散され反射されることで被検査物2を照射する。
(もっと読む)
変位センサシステム及び変位センサ
【課題】反射率が不均一な対象物でも表面形状等を測定することが可能な変位センサシステム及び変位センサを提供する。
【解決手段】変位センサシステム1は、二次元撮像素子15の撮像面15A上の複数の領域Eを指定する領域指定部33と、指定された領域Eごとに対応して個別の投受光感度を設定可能な感度設定部20と、各領域内の走査線Lの受光信号を、当該領域に対応する投受光感度下で受光処理部17に取り出させ、その取り出された受光信号に応じた検出処理を実行する受光制御部20と、を備える.
(もっと読む)
変位量測定装置及び同測定方法
【課題】変位量測定装置の精度を向上する。
【解決手段】測定対象物に標識Dを取り付けて撮影する。最初に撮影した初期画面を基準画面として、基準画像を構成する画素に当該画素の輝度情報の重みを付けて、基準画像の中心位置座標を算出してその値と、画素数で表した面積とを記憶しておく、所定時間経過後に同様に測定対象物に標識Dを取り付けて撮影し、上記と同様の処理を得てその中心位置座標を算出し、その値と記憶した上記基準画像の中心位置座標を比較してその差(変位量)を求める。
(もっと読む)
運転支援装置、運転支援方法、及び運転支援プログラム
【課題】記録手段に記録された画像データを合成して正確な合成画像を表示することができる、運転支援装置を提供すること。
【解決手段】運転支援装置1は、車両の周辺を撮影するカメラ40と、カメラ40が撮影した画像データを記録する画像メモリ65と、車両の移動に関する移動情報に基づき車両の移動状態を特定する移動状態特定部61と、移動状態特定部61が特定した移動状態に基づき、画像メモリ65に記録された画像データを合成し、車両を含む領域の合成画像を生成する合成画像生成部62と、合成画像生成部62が生成した合成画像を表示するディスプレイ50と、車両の旋回に対応して合成画像生成部62が生成した合成画像に含まれる基準標識の配置と、合成画像上に重畳表示される基準標識の旋回に対応する予測配置とに基づき、移動状態特定部61が旋回を移動情報に基づき特定する際に用いる旋回パラメータを校正する校正部64とを備える。
(もっと読む)
5自由度誤差測定装置
【課題】回転体の回転に伴って生じる都合5軸方向の運動誤差を高精度で測定することのできる5自由度誤差測定装置を提供する。
【解決手段】回転体2の外周面に回転体2の回転軸の方向に一定の間隔を置いて設けられた複数の周溝から形成された回折格子面3を設け、回転体2の径方向に相当するセンサ座標系第1軸と回転体2の軸方向に相当するセンサ座標系第2軸に沿った回折格子面の相対移動変位を検出する2軸干渉センサユニットS1,S2,S3を回転体2の外周面から径方向外側に間隙をおき、かつ、相互に重合しないようにして回転体2の周方向の相異なる少なくとも3つの位置に固定配備し、3つの2軸干渉センサユニットS1,S2,S3のセンサ座標系第1軸の干渉信号とセンサ座標系第2軸の干渉信号に基いて都合5軸方向の運動誤差Δx,Δy,Δz,Δu,Δvを同時に求める。
(もっと読む)
管内面形状測定装置
【課題】小径管内面の三次元形状を演算して、小径管内面の状態を正確に且つ迅速に測定することが可能な管内面形状測定装置を提供する。
【解決手段】この管内面形状測定装置50は、演算部11と撮像部12により構成され、演算部11は、撮像部12を管内の軸方向へ移動させたときのカメラ5により撮像されたレーザリング9の径の値、及び文様の移動量に基づいてカメラ5の移動距離を演算するPC(演算手段)1と、レーザ投光器6に備えられたレーザを駆動するレーザ駆動回路3と、カメラ5により撮影された画像を処理するイメージプロセッサ4と、演算結果を表示するモニタ2と、を備えている。
(もっと読む)
検査装置、検査方法、プログラムおよび記録媒体
【課題】液晶パネルの欠陥検査技術において、異物混入に起因する欠陥を精度高く検出する技術を提供する。
【解決手段】本発明に係る検査装置1は、表偏光板10、検査対象の液晶パネル20、裏偏光板30およびバックライト40を、表偏光板10側から撮像して検査用画像60を取得し、検査用画像60および欠陥を精度よく検出するための視角特性情報を用いて液晶パネル20の検査を行う。上記視角特性情報は、検査装置1が、表偏光板10、標準として用いる液晶パネル20’、裏偏光板30およびバックライト40を、表偏光板10側から撮像して第1画像を取得するとともに、表偏光板10およびバックライト40を表偏光板10側から撮像して第2画像を取得し、第1画像および第2画像に基づいて生成したものである。
(もっと読む)
寸法測定装置
【課題】搬送する物品の載置状態や搬送速度が一定でない場合でもそれに影響されることなく、搬送中の物品の寸法を正しく測定することができる寸法測定装置を提供する。
【解決手段】物品を搬送する搬送装置を備えた寸法測定装置であって、前記搬送装置の搬送方向に沿って所定間隔をおいて配置され、該搬送装置で搬送される物品を検出する複数個の物品検出センサと、前記搬送中の物品の所定位置の両側端部を検出する側端部検出センサと、前記側端部検出センサの一定時間間隔で検出した信号について、一つの物品検出センサが物品を検出してから次の物品検出センサが前記物品を検出するまでの信号を前記の物品検出センサ間の距離に応じた位置に記憶し、少なくとも物品の側端部を前記側端部検出センサが検出しなくなるまで記憶するメモリと、前記メモリのデータから物品の外形寸法を算出する寸法算出手段と、を備える。
(もっと読む)
三次元計測用画像撮影装置
【課題】単カメラを用いて移動しながら撮影を行う場合に、撮影を過不足なく効率的に行なえる三次元計測用画像撮影装置を提供する。
【解決手段】本発明による三次元計測用画像撮影装置1は、測定対象物2を単カメラにより重複させながら順次撮影する三次元計測用画像撮影装置1において、識別コードを有するマークを測定対象物2と共に撮影し、撮影画像からマークを抽出し、マークの識別コードを識別し、撮影画像について測定対象物2の領域をマークで囲まれた撮影領域に区分し、各撮影領域について異なる撮影画像に含まれる数を計数し、撮影回数に応じて撮影領域をグループ分けし、測定対象物2の撮影範囲画像の座標空間にマークの位置を入力し、撮影範囲画像に入力されたマークの位置を、撮影領域を囲むマークの符号が合致するように結線して撮影範囲画像に撮影領域を当てはめ、撮影範囲画像において当てはめられた撮影領域をグループ分けして表示する。
(もっと読む)
膜厚測定装置
【課題】測定値の信頼性に関する新たな情報を提供できるようにする。
【解決手段】カーブフィッティング法において理論干渉波形毎に得られる各フィッティングレベルと、各フィッティングレベルにそれぞれ対応する各理論干渉波形の膜厚との相関を示す相関図36を作成して表示するとともに、膜厚むらによって変化する相関図36の波形の谷部のピーク値について、しきい値L1,L2を設定し、谷部のピーク値が、しきい値L1,L2で規定される警報範囲に入ったときには、安定に測定が行われていないとして警報を出力するようにしている。
(もっと読む)
スポット位置測定方法および計測装置
【課題】光学系を変更することなく、撮像画像内のスポット中心の位置を確認できるようにする。
【解決手段】膜厚サンプル35を、例えば、X方向に位置をずらして、複数の位置でそれぞれ撮像するとともに、各位置でのスポット光に基づいて膜厚をそれぞれ計測し、撮像した画像を処理して、画像の中心Pと膜厚サンプル35の中心P1との中心位置の差を算出し、この中心位置の差に対する膜厚の変化に基づいて、画像の中心Pに対するスポット光のX方向のずれ量を求め、同様に、画像の中心Pに対するスポット光のY方向のずれ量を求める。
(もっと読む)
81 - 100 / 406
[ Back to top ]