
Fターム[2F068AA03]の内容
音響的手段による測長装置 (5,715) | 測定内容 (696) | 位置;座標;変位;移動量 (233) | 2次元 (59)
Fターム[2F068AA03]に分類される特許
1 - 20 / 59
溶融部界面位置検出方法及びその装置
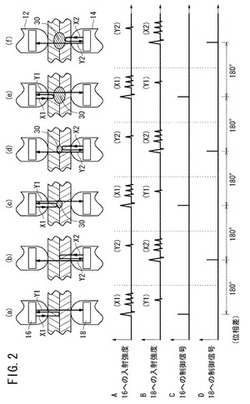
【課題】スポット溶接の最中にワークに生成する溶融部の界面の位置を精度よく且つ効率的に検出する。
【解決手段】第1溶接チップ12に設けられた第1送受信器16から、第1超音波を送信する。第1超音波の一部は溶融部30の界面で反射されて第1反射波X1となり、第1送受信器16に戻る。一方、別の一部は溶融部30を透過する第1透過波Y1となり、第2溶接チップ14に設けられた第2送受信器18に到達する。第1反射波X1の強度が十分に減衰した後、好ましくは位相差が180°となるようにして、第2送受信器18から第2超音波を送信する。第2超音波の一部は溶融部30の界面で反射されて第2反射波X2となり、第2送受信器18に戻る。一方、別の一部は溶融部30を透過する第2透過波Y2となり、第1送受信器16に到達する。以上の第1超音波・第2超音波の送信・受信を交互に繰り返す。
(もっと読む)
ポインティングシステム

【課題】音波発信装置または音波受信装置のいずれか一方が単数であっても、ポインティングデバイスの指し示す方向を推定し、指示点の表示を行なう。
【解決手段】変調音波を発信する単一のスピーカ20aと、ポインティングデバイス10に設けられた複数のマイク10a〜10cと、ポインティングデバイス10の傾きを検出するジャイロセンサ10dと、スピーカ20aからマイク10a〜10cが受信した変調音波に相関処理を施して、マイク10a〜10cとスピーカ20aからの距離または距離差を算出し、距離または距離差に基づいて、マイク10a〜10cの空間上の位置を推定し、ポインティングデバイスの方向ベクトルを推定し、方向ベクトルと平行な直線と平面としてのスクリーン20との交点A2を推定するPC30と、を備える。
(もっと読む)
音響波型位置検出装置
【課題】音響波型の位置検出装置において、複数の物体が接触対象の面上をドラッグしているとき、物体がこの面上に実際に接触したか否かを正確に検出可能とする。
【解決手段】物体の接触対象である面2aに沿って音響波を伝搬させるとともに、この伝搬した音響波を検出して電気的な検出信号S3、S4を得、音響波が物体によって遮断されたときの検出信号S3、S4の減衰に基づいて、該物体の前記面2a上の接触位置を検出するように構成された音響波型位置検出装置100において、面2a上を複数の物体がドラッグしている際に出力される前記減衰の状態を示す信号の振幅並びに、該信号の立ち上がり部の長さ、ピーク間距離および波形の少なくとも1つに基づいて、物体の前記面2aへの接触の有無を検出する検出手段21、22を設ける。
(もっと読む)
面で囲まれる容器
【課題】ボイラ火炉等の面で囲まれる容器の内部の検査に用いための基準点を決定することが容易な面で囲まれる容器を提供する。
【解決手段】面で囲まれる容器であって、前記容器の内側面の位置座標既知の単数又は複数個所に、内壁面からの突起物であるマーカーが設けられている。また、前記マーカーは、該マーカーが設けられている位置の位置情報を有するバーコード又は刻印が刻設されているか、該マーカーが設けられている位置の位置情報を有するICタグを取り付け可能な取付部が設けられている。
(もっと読む)
面で囲まれる容器の内壁面での検査作業結果と作業位置の特定方法及び情報管理方法
【課題】ボイラ火炉等の面で囲まれる容器の内部の検査に用い、基準点を決定することが容易であり、しかも特定する検査位置が大型の容器内であっても簡単に位置を特定することができ、検査と検査位置特定を同時に行うことができる面で囲まれる容器の内壁面での検査作業結果と作業位置の特定方法を提供する。
【解決手段】面で囲まれる容器の内壁面での検査作業結果と作業位置の特定方法であって、前記内壁面上の位置座標既知の箇所に音波を異なる2箇所以上から発信可能な発信器を配置し、作業者が携帯可能であって、前記音波を受信可能な受波器及び前記検査が可能な検査具が一体となった一体物を、前記検査作業を行う位置に配置し、前記検査具を用いて前記検査作業結果を得るとともに、前記発信器の2箇所以上より音波を発信し、前記2箇所以上から発信された音波それぞれが、前記受波器に到達する時間を計測し、前記到達時間と、前記2箇所以上の音波の発信箇所の位置座標を用いて、前記受波器の位置座標を特定する。
(もっと読む)
面積の大きい超音波接触画像処理
【課題】超音波接触画像処理のための方法および装置の提供。
【解決手段】薄膜トランジスタ(TFT)アレイが、基板に堆積されている。上記TFTアレイには、複数の受信器要素を備えた受信器が堆積されており、受信信号を受信する。上記受信器に隣接している送信器が、超音波周波数で送信信号を発生させる。上記送信信号は、表面から反射され、反射信号を作り出す。受信信号は、干渉の結果として送信信号と反射信号とを重ね合わせたものである。受信信号は、表面の全域での音響インピーダンスの差を表す。
(もっと読む)
ベンド管検査装置
【課題】同一平面内に多数の屈曲部を有するベンド管内に挿入して、肉厚測定や管内の損傷の有無を調べることが可能なベンド管検査装置を提供する。
【解決手段】複数のリンク材12が左右対となる回動係合部13を介して連結されたリンクチェーン14と、リンクチェーン14の回動係合部13に取付けられてリンクチェーン14の高さより直径が大きい板状車輪15と、リンクチェーン14の中央に挿通される屈曲可能なガイドホース16と、リンクチェーン14の先部に設けられた検査部17とを有し、回動係合部13は、一つのリンク材12の前側に対向して設けられ左右方向外側に向いた突出部18を有する幅狭連結板部19と、後側に対向して設けられ隣のリンク材12の突出部18が嵌入する丸孔部20を備える幅広連結板部21とを有し、板状車輪15は突出部18に設けられている。
(もっと読む)
音波を用いた探知方法、非接触音響探知システム、そのシステムで用いるプログラム、およびそのプログラムを記録した記録媒体
【課題】探知対象物の位置を正確に把握することができる探知方法およびその探知方法を行うことができる非接触音響探知システムの提供。
【解決手段】探知対象物を内部に含む被照射体の表面に音波を照射し、その表面の複数の測定個所において振動速度を測定し、得られた情報から前記探知対象物の位置を特定する音波を用いた探知方法。
(もっと読む)
実長測定装置
【課題】地図の表面上の経路を簡易且つ正確に測定する実長測定装置を提供する。
【解決手段】地図の表面をなぞった経路の長さを計測する実長測定装置で、なぞり部と赤外線送出部と超音波送出部とが備えられる第一体と、なぞり部でなぞった経路の長さを求める第二体とで構成され、第二体に、赤外線送出部からの赤外線を受信する赤外線受信部と、超音波送出部からの超音波を受信する複数の超音波受信部と、赤外線受信部で受信された赤外線に対する複数の超音波受信部で受信された超音波夫々の遅延時間差によって超音波送出部から複数の超音波受信部までの夫々の距離を求めて第一体の位置を確知し、この確知を第一体からの赤外線と超音波とを受信する毎に行い、第一体の位置の変化量を累積加算して経路の長さを求める演算部とが備えられる。
(もっと読む)
溶接システムおよび溶接方法
【課題】溶接中に、被溶接対象が高温状態でも安定した送受信感度で溶接検査を行なう。
【解決手段】溶接システムは、溶接機構1と、送信用レーザ光源4と、溶接機構1とともに被溶接対象2に対して移動しながら、送信用レーザ光源4で発生した送信用レーザ光を溶接後の被溶接対象2の表面に照射させて送信用超音波を発生させる送信用光学機構9と、受信用レーザ光を発生して被溶接対象に照射し、送信用超音波の反射によって得られる反射超音波を検出するための受信用レーザ光源5と、溶接機構1とともに被溶接対象2に対して移動しながら受信用レーザ光を、溶接後の被溶接対象の表面に照射し、被溶接対象2表面で散乱・反射したレーザ光を集光させる受信用光学機構10と、散乱・反射したレーザ光を干渉計測するための干渉計6と、を有する。
(もっと読む)
音波を用いた探知方法、非接触音響探知システム、そのシステムで用いるプログラム、およびそのプログラムを記録した記録媒体
【課題】探知対象物の位置を正確に把握することができる探知方法およびその探知方法を行うことができる非接触音響探知システムの提供。
【解決手段】探知対象物を内部に含む被照射体の表面に音波を照射し、その表面の複数の測定個所において振動速度を測定し、得られた振動速度分布図から前記探知対象物の位置を特定する音波を用いた探知方法であって、音波発信源から音波を照射し、前記被照射体の表面を振動させる工程と、前記被照射体の表面のn箇所(n≧2)の測定個所を、各々、P1、P2・・・Px・・Pn(xは1〜nの整数)とし、それらの測定箇所の各々において、照射した音波の周波数がωである場合の前記被照射体の表面の振動速度を測定し、Pxにおける前記振動速度をEx(ω)とする工程と、特定の情報処理を行う工程とを備える探知方法。
(もっと読む)
冷延鋼板の製造方法
【課題】鋼中の非金属介在物に起因する表面欠陥に対する品質管理を行うにあたり、歩留まりや生産性の低下の少ない冷延鋼板の製造方法を提供する。
【解決手段】欠陥検出装置により検出されるスラブ中に存在する非金属介在物の大きさおよびスラブ表面からの深さ方向位置と、前記スラブを冷延鋼板とした時に前記非金属介在物が表面欠陥となるかどうかとの関係を予め求めておき、前記欠陥検出装置によるスラブ中の非金属介在物の検出結果を基に品質管理を行う冷延鋼板の製造方法;ここで、非金属介在物の大きさとは非金属介在物のスラブ幅方向の最大長を、非金属介在物のスラブ表面からの深さ方向位置とはスラブ表面と非金属介在物表面との最短距離を表す。
(もっと読む)
位置検出装置、位置検出方法および移動体
【課題】 複数の移動体を同時に使用する場合に、他の移動体からの超音波による影響を受けることなく、それぞれの移動体の位置を正確に検出する。
【解決手段】 移動体が、トリガ信号送信手段と、前記移動体自身のトリガ信号以外のトリガ信号を受信するトリガ信号受信手段と、前記移動体が送信するトリガ信号および超音波の送信タイミングを前記移動体固有に設定された待機時間に基づいて制御する制御手段とを備え、レシーバが、トリガ信号受信手段と、相互に離れて配置された少なくとも2つの超音波受信手段と、受信した超音波から超音波到達時点を検出し、トリガ信号を受信した時点と前記超音波到達時点とから、超音波が移動体から超音波受信手段に到達するまでの超音波伝搬時間を算出する時間算出手段と、前記超音波伝搬時間と超音波受信手段相互の間隔長に基づき移動体の位置を算出する位置算出手段とを備える。
(もっと読む)
電子ペン装置
【課題】 長時間使用する場合であっても、描画性能が維持される電子ペン装置を提供する。
【解決手段】 本発明の電子ペン装置10は、電子ペン11が、電磁波送信手段と、超音波送信手段とを備える送信部を有し、受信部12が、電磁波受信手段と、少なくとも2つの超音波受信手段と、超音波が前記超音波送信手段から前記超音波受信手段に到達するまでの超音波伝搬時間を算出するデータ処理手段とを備え、データ処理装置14が、前記超音波送信手段と前記超音波受信手段との距離を計算して前記電子ペン11の位置を算出し、画像表示装置13上に電子ペン11の位置を表示し、前記超音波受信手段が、画像表示装置13の表示面側に配置され、移動手段15により、画像表示装置13に対して相対的に移動可能であり、前記移動が、画像表示装置13の表示面に対する垂直方向の移動を含むことを特徴とする。
(もっと読む)
位置検知システムおよび位置検知方法
【課題】船体の外板におけるロボットの位置を精度良く検知できる位置検知技術を提供する。
【解決手段】ロボットの位置検知システムは、船体外板80の異なる位置に取り付けられ船体外板80に伝播させる音波を発信する2つの音源部31、32と、ロボット2Aに設けられ船体外板80を伝播した音波を受信する音波受信部25とを備えている。そして、この位置検知システムでは、各音源部31、32から発信された音波が船体外板80を伝播して音波受信部25で受信されるまでの各伝播時間と、船体外板80における各音源部31、32の位置情報とに基づき、ロボット2Aの位置を検知する。その結果、船体外板80におけるロボット2Aの位置を精度良く検知できる。
(もっと読む)
構造物内部状態計測システム及び構造物内部状態計測方法
【課題】構造物内部状態計測において、超音波を用いてさらに精度よく、測定対象である構造物の内部状態を計測することである。
【解決手段】構造物内部状態計測システム20は、構造物10に超音波を印加供給する超音波供給部30と、構造物10の内部を伝播する超音波振動18を検出して超音波検出信号を出力する超音波検出部40と、構造物10を移動可能に支持する試料保持部44と、試料保持部44を移動させる走査機構部46と、超音波検出部40からの超音波検出信号を受け取り、これに周波数解析を行い、得られるスペクトル分布に基いて計測を行う内部計測部50を含んで構成される。
(もっと読む)
対象物の変形可能なタッチ面上で局地的に変形する接触位置を特定する位置特定装置および方法
対象物(14)の変形可能なタッチ面(18)上で局地的に変形する接触位置を特定する本位置特定装置(10)は、少なくとも1つの発信トランスデューサ(E1、E2)および受信トランスデューサ(R1、R2)を有し、それぞれを対象物の変形可能なタッチ面上で伝搬する機械的弾性波を発信し、捕捉するように設計する。本装置はさらに、発信トランスデューサおよび受信トランスデューサ(E1、E2、R1、R2)に接続する中央電子装置(12)を有し、この中央電子装置(12)を、局地的に変形する接触があることにより、タッチ面に発信される波の伝搬によって生じるタッチ面(18)の共振振動の少なくとも1つの固有モードの周波数シフトを検出し、周波数シフトを解析することによって局地的に変形する接触位置を特定するようにプログラムする(26、28)。 (もっと読む)
タッチセンシング方法およびこの方法を実施するための装置
本発明は、例えば少なくとも1つのトランスデューサを含む物体の表面への接触事象などの衝撃の位置に起因する音響応答を決定するための方法に関する。この方法は、a) 上記表面上の少なくとも1つの位置における予め定められた励振(E)に対応する少なくとも1つのトランスデューサからの音響信号を受信するステップと、b) ステップa)で受信された音響信号に基づいて音響応答を決定するステップと、c) 上記予め定められた励振の位置と異なる上記表面上の少なくとも1つの位置に起因する音響応答を上記ステップb)において決定された少なくとも2つの異なった音響応答に基づいて決定するステップとを備える。  (もっと読む)
(もっと読む)
ガラス中の金属粒子の状態検出方法
【課題】本発明は、小型の装置で簡便にガラス中の金属粒子の分布を検出する方法を提供することを目的とする。
【解決手段】本発明に係るガラス中の金属粒子の状態検出方法は、容器内において予め溶融固化されたガラスの上面に金属粉を配置する工程と、前記容器を加熱して内部の前記固化されたガラス及びガラス破砕物を溶融し、設定時間その溶融状態を維持する工程と、前記溶融状態を維持する工程の後、前記容器を冷却して前記金属粉を含む溶融されたガラスを固化する工程と、前記固化する工程の後、超音波探触子を前記容器の外面に沿って移動させ、ガラス中の金属粒子の分布を検出する工程を備えている。
(もっと読む)
正位置と逆位置の間で枢動可能な測距儀
平面の表面に平行に対象物の移動を見つけるための測距儀は、平面の表面に関わる正位置と逆位置の間で枢動可能のキャリヤーに厳格に配属されます。好ましくは、正位置か逆位置かの位置を決める定位メカニズム(orienting mechanism)を提供して、しかも当該定位メカニズムは、キャリヤーと測距儀を含みます。好ましくは、正位置と逆位置の間で枢動可能のキャリヤーと測距儀のためのピボットは、逆になるようキャリヤーを平面の表面に取り付けらせるために厳格に平面の表面またはアタッチメント機構に取り付けられます。  (もっと読む)
(もっと読む)
1 - 20 / 59
[ Back to top ]