
Fターム[2F069AA72]の内容
測定手段を特定しない測長装置 (16,435) | 測定内容 (3,272) | 角度 (430) | 2直線のなす角度 (31)
Fターム[2F069AA72]の下位に属するFターム
曲げ角度 (6)
基準に対する1直線の角度 (9)
基準が搬送方向 (1)
Fターム[2F069AA72]に分類される特許
1 - 15 / 15
傾斜角度推定システム、相対角度推定システム及び角速度推定システム
【課題】積分演算をデータ処理に含めず又は積分演算処理工程を最小限しか行わず、回転運動する物体の姿勢又は速度状態を推定する。
【解決手段】一の回転中心点を有し該回転中心点を軸として回転する一の物体と、該回転中心点において一の物体と接続し回転中心点を軸として回転する他の物体との間の相対的角度を推定するシステムであり、一の物体に取付けられた2以上の加速度センサからなる第1の加速度センサ群と、他の物体に取付けられた2以上の加速度センサからなる第2の加速度センサ群と、これらの群の加速度センサからの出力に基づいて物体の傾斜角を算出する演算処理ユニットからなり、第1の群の加速度センサは一の物体上で一線上に整列し、第2の群の加速度センサは一の物体上で一線上に整列し、第1の群を構成する加速度センサを結ぶ線と第2の群を構成する加速度センサを結ぶ線が共に回転中心点を通過する。
(もっと読む)
幾何誤差計測システム

【課題】不適切な幾何誤差に基づく補正の実行により多軸工作機械の加工精度が低下する事態を、きわめて効果的に防止することが可能な幾何誤差計測システムを提供する。
【解決手段】幾何誤差計測システムSは、予め幾何誤差の閾値を設定可能な閾値記憶領域25と、同定した幾何誤差が閾値を上回っている場合にその事態を報知する出力手段32と、幾何誤差設定値を更新記憶可能なパラメータ記憶領域26とを有している。そして、新たな幾何誤差の計測後に、その計測値に、パラメータ記憶領域26に記憶されている幾何誤差設定値を加算することによって、新たな幾何誤差設定値を算出するとともに、新たに計測された幾何誤差あるいは算出された新たな幾何誤差設定値の内のいずれか一方が閾値を上回っている場合には、幾何誤差設定値を自動更新せず、手動による新たな幾何誤差設定値の設定を可能とする。
(もっと読む)
ゴルフアドレス調整システム
【課題】アドレス姿勢確認システムを提供する。
【解決手段】ゴルフアドレス姿勢確認システムは、位置情報を取得する測位装置を含む第1、第2測定部を備える。2つの測定点における位置情報に基づいて、2つの測定点を結ぶ直線を特定する制御部を備える。告知部を備える。第1測定部は使用者の一方の肩に取り付けられる。第2測定部は使用者の他方の肩に取り付けられる。制御部は、アドレスに入る前に、使用者が第1位置に移動した時に第1測定部を使って得た第1位置情報と、第2位置に移動した時に第1測定部を使って得た第2位置情報とに基づいて、第1直線を特定する。アドレスに入る時に、特定の時間間隔で、第1特定部で取得した位置情報と、第2測定部で取得した位置情報とに基づいて、使用者の両肩を結ぶ第2直線を特定する。制御部は、第1直線と第2直線とが平行な状態にあるか否かを判断し、告知部は、制御部による判断結果を使用者に告知する。
(もっと読む)
電子装置、電子装置の製造方法および機能素子の寸法の測定方法
【課題】備える機能素子を直接測定することなく、機能素子の寸法を精度よく測定することにより、機能素子の状態が把握されることができる電子装置を提供すること。
【解決手段】電子装置1は、基板2と、基板2上に配置され、固定電極31および固定電極31と空隙を隔てて対向配置された可動板322を備える可動電極32を有する機能素子3と、基板2上に設けられ、機能素子3が配置された空洞部6を画成する素子周囲構造体5と、基板2上の空洞部6の外部に設けられ、固定電極31に対応する第1の検査用膜41と、可動電極32に対応する第2の検査用膜42とを有する検査体4とを有し、検査体4は、所定の部位の寸法が測定されることにより、機能素子3の所定の部位の寸法を求めるために用いられることを特徴とする。
(もっと読む)
角度測定装置
【課題】物体の角度を測定する際の基準位置を容易に設定する。
【解決手段】十字線が示されるレチクル26を保持し、ドーナツ型のスケール円板25が上面の端部に固定されている回転筒24が、レンズ23の光軸A回りに回転可能となるようにケース21の内部に設置されている。基準ピン29は、回転筒24の基準穴24Aに適合し、回転筒24を基準位置に設定したときに、基準穴24Aに挿入することが可能である。エンコーダセンサヘッド27は、スケール円板25の回転量および回転角を検出し、カウンタ表示部34は、検出された回転量および回転方向に基づいて、表示値がリセットされたときのスケール円板25の回転方向の位置を基準にして、スケール円板25の回転角を表示する。本発明は、例えば、顕微鏡用のデジタルプロトラクタに適用できる。
(もっと読む)
一軸コンバインドプラント及びこの一軸コンバインドプラントの起動方法
【課題】本発明は、クラッチ嵌合時の2つの軸の軸ずれを測定する軸ずれ測定装置及びこの軸ずれ測定装置を備えた一軸コンバインドプラントを提供することを目的とする。
【解決手段】制御装置10において、ガスタービン3の軸3aと蒸気タービン5の軸5aとの軸ずれ量を測定し、測定した軸ずれ量に応じて蒸気タービン5の回転速度の昇速率及びヒートソーク時間を設定し、クラッチ7が軸3a,5aを結合するときの軸ずれ量が許容範囲内に収まるようにする。
(もっと読む)
関節チェーンの運動を表わす情報決定のための自律的システム及び方法
本発明は、少なくとも2つの固体要素(ES1_1、ES2_1、ES1_2、ES2_2、ES3_2、ES1_3、ES2_3、ES3_3、ES4_3)、及び前記2つの要素をつないでいる少なくとも1つの関節(ART1_1、ART1_2、ART2_2、ART1_3、ART2_3、ART3_3)を備える、関節チェーン(CA_1、CA_2、CA_3)の運動を表わす情報を決定するための自律システムに関する。本システムは、前記関節チェーンの2つの異なる要素上に固定して取り付けられ、行われた測定を伝送するために適する、装置間距離を測定するための、少なくとも2つの装置(DISP1_1、DISP2_1、DISP1_2、DISP2_2、DISP3_2、DISP1_3、DISP2_3、DISP3_3、DISP4_3)を備える。さらに、本システムは、測定装置により供給された少なくとも1つの測定値に基づき、2つの測定器を隔てる少なくとも1つの距離を決定する手段と、装置間距離を測定するための前記装置により伝送された測定値に基づき、前記関節チェーンの運動を表わす情報を計算するのに適する、前記関節チェーンに取り付けられた計算手段(CALC)とを備える。 (もっと読む)
動き測定装置
【課題】コンパクトな構成で精度の高い動き測定を行う。
【解決手段】動き測定装置として機能するPCのプロセッサは、角速度センサおよび加速度センサから角速度および加速度をそれぞれ繰り返し取得し、取得された角速度を積算していく。そして、取得された加速度が加速度条件を満足したとき、積算結果をリセットする。
(もっと読む)
姿勢角決定装置およびその決定方法
【課題】複雑な関係にある座標系間であってもその姿勢関係を容易に,精度良く求めることのできる姿勢角決定装置およびその決定方法を提供すること。
【解決手段】本発明の姿勢角決定装置は,各リンクに設定された3軸直交座標系の各軸について,軸方向と重力ベクトルの方向との間の角度である傾斜角を取得する傾斜角取得部と,第1リンクと第2リンクとの姿勢関係を固定したまま最大3通りの全体姿勢を取らせる姿勢変化指示部と,各全体姿勢における各リンクについて各軸方向の傾斜角から傾斜ベクトルを求める傾斜ベクトル算出部と,各リンクについて全体姿勢ごとに求められた傾斜ベクトルにより傾斜行列を求める傾斜行列算出部と,傾斜行列算出部により求められた各リンクの傾斜行列に基づいて,一方と他方の逆行列との積を求めることにより,姿勢角を表すリンク行列を算出するリンク行列算出部とを有する。
(もっと読む)
軸間角度補正方法
【課題】 複数軸をもつ機械の軸間角度補正が高精度に且つ容易に行える方法の提供。
【解決手段】 機械16のテーブル12に置かれた一の基準球36上の指定移動軸方向位置での測定軸方向形状情報をテーブル12の直線移動により同一基準球36上の複数の異なる指定移動軸方向位置について取得する基準球測定工程(S10)と、該形状情報に基づき該基準球36の測定軸方向形状のピーク点での該センサー14よりの測定軸方向位置情報を各指定移動軸方向位置について求めるピーク検出工程(S12)と、該各ピーク点の位置情報に基づきテーブル12の実際の移動方向を表わす実直線情報を求める誤差情報取得工程(S14)と、該実直線情報に基づき補正用情報を求める補正用情報取得工程(S16)と、該補正用情報に基づき該センサー14よりの測定軸方向位置情報を補正する補正工程(S20)と、を備えたことを特徴とする軸間角度補正方法。
(もっと読む)
管内調査装置
【課題】 パイプインパイプ工法を実施するための既設管路の管内を詳細に調査できるようにする。
【解決手段】 管路1の内部を走行可能であるとともに管路1を構成する管に対してそれぞれ心出しされることが可能な第1の測定ユニット13と第2の測定ユニット14とを備える。第1の測定ユニット13と第2の測定ユニット14とのいずれかに、その測定ユニット13、14が管に心出しされてその管と同軸とされたときに周方向に沿った複数の位置でその管の内径を測定可能な内径測定装置41を備える。管路1の管継手を構成する一方の管3に第1の測定ユニット13が心出しされてその管3と同軸とされるとともに他方の管2に第2の測定ユニット14が心出しされてその管2と同軸とされたときに、これら第1の測定ユニット13と第2の測定ユニット14との屈曲角を測定することで管継手の屈曲角を測定可能な屈曲角測定装置53を備える。
(もっと読む)
ころ形状測定装置およびころ形状測定方法
【課題】 位置決め誤差及び円筒度が算出可能で、円筒度を考慮したころ外形母線形状を正確に測定可能なころ形状測定装置およびころ形状測定方法を提供する。
【解決手段】 被測定ころ4の中心線4aに対して対称な二つの外形母線とそれぞれ接触するように配置可能な一対の測定子6,6を備える。
(もっと読む)
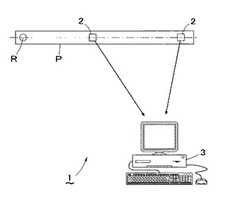
路面断面プロファイルの測定方法
【課題】 測定路面の両端の一定長さが平坦でなくても測定路面の全範囲において簡易かつ精度良くプロファイル測定が可能な路面断面プロファイルの測定方法を提供する。
【解決手段】 測定ブロック10の長さの異なる第1及び第2連結棒14,15が真直状態での第1ローラ11及び第3ローラ13の中心間寸法を基準距離として、基準距離を複数点に分割した複数の計測位置を決める。測定ブロックが路面の縦方向に進行し、第3ローラが計測位置を順次移動する毎に、各計測位置にて第1及び第2連結棒のなす連結角をロータリエンコーダにより検出する。連結角検出値から路面のプロファイルを推定する。さらに、路面のプロファイルを評価する評価関数を設定し、この評価関数を共役勾配法等の演算手法を用いて最小化することにより、路面全体の精密な断面プロファイルを得ることができる。
(もっと読む)
車載用装置および加速度センサの傾斜角度検出方法
【課題】 加速度センサを備えた車載用装置であって、その取付位置や取付角度を自由に選択しても基準軸方向の加速度を精度よく検出することが可能な車載用装置を提供することを課題とし、さらには、基準軸に対する加速度センサの感度軸の傾斜角度を検出する加速度センサの傾斜角度検出方法を提供することを課題とする。
【解決手段】 第一の加速度センサ11qと、その感度軸qと直交する感度軸pを有する第二の加速度センサ11pと、基準軸Y方向に検査用加速度を作用させたときに各加速度センサ11p,11qで検出された加速度の値に基づいて感度軸qの基準軸Yに対する傾斜角度θを演算する傾斜角度検出部13と、各加速度センサ11p,11qで検出された加速度の値と傾斜角度θとに基づいて、基準軸Y方向に作用している加速度の値および基準軸X方向に作用している加速度の値の少なくとも一方を算出する制御部12と、を備える車載用装置とする。
(もっと読む)
間口の寸法測定装置および方法
【課題】 経験や熟練を要することなく、間口の寸法および柱の傾きや鴨居の傾斜・撓みなどの形状を測定する装置を提供すること。
【解決手段】 立設した柱21を有する架台2と、この架台2の柱21に取り付けられる寸法測定装置本体1とを具備し、この寸法測定装置本体1は、柱21に取り付けられる基台26と、この基台26に水平方向に植設された固定軸27に回動自在に設けられた回転台3と、この回転台3上に載置され、基台26に対する回転台3の回動角度を検出するロータリ・エンコーダ32と、回転台3に載置され、基台26から間口の測定点まで長さを検出するワイヤーまたはテープ38およびインクリメンタル形のリニア・エンコーダ33と、検出した角度データおよび長さデータを対応させて極座標で格納する記憶手段とを具備するものである。
(もっと読む)
1 - 15 / 15
[ Back to top ]