
Fターム[2F069AA93]の内容
測定手段を特定しない測長装置 (16,435) | 測定内容 (3,272) | 物品の姿勢 (54)
Fターム[2F069AA93]に分類される特許
21 - 40 / 54
鞍乗型車両、および鞍乗型車両の傾き検出装置
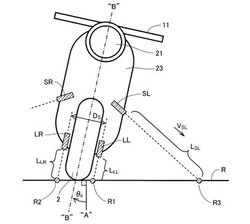
【課題】適切に車両の傾きの状態を検出することができる自動二輪車を提供する。
【解決手段】自動二輪車には、車体の進行方向左右の路面Rまでの距離を測定するセンサであって、モーターサイクルの下方向に向けて取付けられる下方距離センサ(左)LL、および下方距離センサ(右)LRと、進行方向左右の路面Rまでの距離を測定するセンサであって、下方距離センサLL,LRよりも外側に向けて取付けられる側方距離センサ(左)SL、および側方距離センサ(右)SRとが設けられている。下方距離センサ(左)LL、および下方距離センサ(右)LRの測定値に基づいて、車両のバンク角θBが算出される。バンク角θBが所定範囲内になければ、側方距離センサ(左)SL、および側方距離センサ(右)SRにより転倒の可能性が判定される。
(もっと読む)
物体認識装置およびロボット装置

【課題】距離データを用いて、対象物体の三次元的な位置姿勢を認識する。
【解決手段】物体の表面の三次元形状データを読み込み、物体の局所的な表面形状を表す特徴量を作成するモデル入力手段と、実際の環境を計測して距離データを取得し、物体の表面情報を作成するシーン計測手段と、シーン頂点の特徴量とモデル頂点の特徴量の類似度を算出し、それらシーン頂点とモデル頂点を対応点ペアとする対応点ペア作成手段と、対応点ペアを含むグループを作成し、対応点ペアとの関係で幾何学的一貫性を有する他の対応点ペアをグループに追加する処理を繰り返し、全ての対応点ペアを基準にグループを作成するグループ化手段と、グループに含まれる対応点ペアに基づき、モデルとシーンの対応点間の距離を最小にする座標変換式を算出し、座標変換式にしたがってモデルを移動させた結果をグループが示す物体の初期位置姿勢とする。
(もっと読む)
角度検出装置及び歩数計
【課題】 加速度センサを用いて構成が簡単で信頼性高く、小型化可能な角度検出装置を提供すること。
【解決手段】 各加速度センサ101a、101bは感度軸が相互に直交するように配置されると共に少なくとも動的加速度を検出して対応する検出信号を出力し、CPU108は加速度センサ101a、101bからの検出信号に基づいて、歩数計の筐体の傾きを算出する。CPU108は、前記傾きに応じて歩数計数に利用する増幅手段106a又は106bを決定して該増幅手段からの検出信号に基づいて歩数計数を行い、前記傾きに応じて歩数計数に利用する増幅手段106a又は106bのゲインを最適化し、利用しない増幅手段106a又は106bのゲインを小さくしてSN比及び歩数演算の精度向上を図る。
(もっと読む)
車両姿勢推定装置、車両姿勢推定方法
【課題】比較的安価な2軸の加速度センサを用いて測定対象となる車両挙動を表すパラメータの数を減らしながら、車両の姿勢を高精度で推定することができる装置等を提供する。
【解決手段】車両姿勢推定装置100によれば、車両1の挙動を表すパラメータとして当該車両の速度と、2軸(ロール軸およびピッチ軸)方向の加速度と、1軸(ヨー軸)まわりの角速度とが測定される。また、当該測定結果に基づき、グローバル座標系のz軸と車両座標系のヨー軸とを一致させるためのグローバル座標系の回転を表す第1演算子と、グローバル座標系のx軸およびy軸のそれぞれと車両座標系のロール軸およびピッチ軸のそれぞれとを一致させるためのグローバル座標系の回転を表す第2演算子との合成演算子にしたがってグローバル座標系における車両の姿勢が推定される。
(もっと読む)
三次元画像生成装置及び三次元画像生成方法
【課題】安全で測定精度の良い三次元画像を生成する三次元画像生成装置を提供する。
【解決手段】この三次元画像生成装置110は、被検査対象物6に超音波を送信する送信部と被検査対象物6から反射した超音波を受信する受信部とを備えたプローブ1と、プローブ1の三次元位置情報及び姿勢情報を生成するセンサ2と、所定のエリアに磁界ベクトルを形成するトランスミッタ4と、三次元位置情報及び姿勢情報に基づいてプローブ1から取得された反射画像の三次元形状を演算するPC(演算部)12と、演算結果を三次元画像として表示するモニタ(表示部)14と、センサ2からの座標をリアルタイムに演算する位置検出回路10と、プローブ1から得られた反射画像データを処理するイメージプロセッサ11と、を備えて構成されている。
(もっと読む)
情報処理装置、情報処理方法
【課題】 第1の座標変換情報、第2の座標変換情報の概略値を外部から入力することなく、より簡便かつ確実に校正情報を取得する為の技術を提供すること。
【解決手段】 校正情報算出部540は、第2の座標変換情報の複数の候補と、センサ計測値と、世界座標系におけるビデオカメラ100の位置及び姿勢とを用いて、第1の座標変換情報の候補を複数求める。そして、求めた複数の候補を統合して1つの第1の座標変換情報を求める。そして、第2の座標変換情報の候補と、第1の変換情報とを校正情報の初期値とし、校正情報を補正する為の繰り返し演算を行う。
(もっと読む)
情報処理プログラムおよび情報処理装置
【課題】加速度センサを備える装置の姿勢を正確に算出する。
【解決手段】コントローラは、所定の撮像対象を撮像するための撮像手段と、当該入力装置に加わる加速度を検出する加速度検出手段とを備えている。ゲーム装置は、撮像手段によって撮像された撮像画像に含まれる撮像対象の画像に関する当該撮像画像内における傾きに基づいて、撮像手段の撮像方向を軸とした回転に関するコントローラの傾きを第1の傾きとして算出する。さらに、ゲーム装置は、加速度検出手段によって検出された加速度に基づいて、撮像方向と異なる方向を軸とした回転に関する傾きを第2の傾きとして算出する。ゲーム装置は、第1の傾きおよび第2の傾きをコントローラの姿勢として用いて所定の処理を実行する。
(もっと読む)
有水式ガスホルダの傾斜測定装置及び有水式ガスホルダの傾斜測定方法
【課題】安価な測定装置を用いて外部の環境によらず安定的にガス槽の傾斜を測定できる有水式ガスホルダの傾斜測定装置を提供すること。
【解決手段】水槽と第1〜第3基柱と昇降自在に設けられたガス槽41を備える有水式ガスホルダの傾斜測定装置10を提供する。この傾斜測定装置10は、ガス槽41に対して同一の相対高さで連結された第1〜第3被検知体と、第1基柱の第1高さに配置され第1被検知体の通過を検知する第1センサ11Aと、第1基柱〜第3基柱の第2高さにそれぞれ配置され、対応する第1被検知体〜第3被検知体の通過を検知する第2〜第4センサ11B〜11Dと、ガス槽が上昇又は下降するときに、第1センサ11Aと第2センサ11Bとの検知タイミングの時間差と、第2〜第4センサ11B〜11Dによる検知タイミングと、に基づいてガス槽41の傾斜を算出する傾斜算出手段13と、を含む。
(もっと読む)
鉄道建築限界測定方法およびその測定装置
【課題】軌道計測データを用いて当該箇所の実曲線半径とカントを算出し、軌道の形状に応じて構造物と車体との離れを正確に算出する鉄道建築限界測定方法およびその測定装置を提供する。
【解決手段】軌道と地上構造物との線路横方向の離れを測定する鉄道建築限界測定方法であって、前記軌道と地上構造物との離れの他に当該軌道上で一定間隔に測定された通り変位を差分法により実測し、水準変位を鉄道車両の台車位置におけるカントにより実測し、前記通り変位及び水準変位の実測値に基づいて当該軌道の局所的な曲率および軌道面の傾斜角を算出する。
(もっと読む)
管路位置の検出方法
【課題】本発明は、管路位置計測装置の姿勢・方位角センサーを最終地点で180°旋回させて計測することにより、管路位置の誤差を高精度に除去することを目的とする。
【解決手段】本発明による管路位置の検出方法は、管路位置計測装置(3)が管路(1)の出発地点(4)から最終地点(5)に到達した状態で、姿勢・方位角センサー(7)を180°旋回させた後に元に戻し、姿勢・方位角のX軸ベクトルと速度方向ベクトルの平行度誤差を管路(1)の位置の誤差として補正する方法である。
(もっと読む)
角度表示装置
【課題】電動ドリル等で一定の角度で穴あけ加工を行う場合、作業に伴う角度計測、及び加工中の角度計測を同時に行える手段が無く、両手がふさがることで高所作業では危険が伴った。距離センサーと制御回路で構成する片手で操作でき加工中でも角度を視認、計測できる角度表示装置を提案する。
【解決手段】 電動ドリル等の回転軸円周上の上下左右方向に反射型距離センサー1、2、3、4を配置し、反射干渉を防ぐための順次駆動回路5、計測時間比較回路6、計測値表示回路7、上下方向角度表示装置8、左右方向角度表示装置9、電源10、スイッチ11、ハウジング12で構成される角度表示装置。電動ドリルに装着するため片手で操作でき、ドリル軸回転中、暗所、作業者の姿勢、利き腕、加工対象物の傾斜、円筒面、球面に関わらず角度の視認、計測が可能であり、加工中でも角度修正が容易な角度表示装置。
(もっと読む)
角度計測装置、撮影装置、及び角度計測方法
【解決課題】低コストな構成で、手ぶれ防止機能を有すると共に、精度よく姿勢角を計測することができるようにする。
【解決手段】加速度検知部によってデジタルカメラのx軸方向及びz軸方向に生じる加速度を検知し(100)、検知された加速度のAC成分とDC成分とを抽出する(102)。また、抽出されたDC成分のピーク値を検出して(104)、デジタルカメラの横方向が水平となっている状態におけるDC成分値を検出する。そして、抽出されたDC成分の値と検出されたDC成分のピーク値との差分に基づいて、水平方向に対するデジタルカメラの横方向の姿勢角を計測し(106)、LCDに計測された姿勢角を表示する(108)。また、抽出された加速度のAC成分に応じて、手ぶれ補正レンズを移動させて、手ぶれによる光軸のずれを打ち消し、手ぶれを防止した被写体像を示す画像データを取得する。
(もっと読む)
角度検出装置及び方法
【課題】測距センサの精度に関係なくスクリーンの傾斜角度を良好な精度で求めることが可能な角度検出装置及び方法を提供する。
【解決手段】画像を投射する投影装置とスクリーン間の距離を測定する1つの測距センサを備え、該測距センサを回転させて測距センサの検出方向を複数の方向へ指向させる。そして、測距センサから検出方向毎に得られる投影装置とスクリーン間の距離データ、及び検出方向間の角度から、投影装置の投射光軸と垂直な方向に対するスクリーンの傾斜角度を算出する。
(もっと読む)
姿勢角決定装置およびその決定方法
【課題】複雑な関係にある座標系間であってもその姿勢関係を容易に,精度良く求めることのできる姿勢角決定装置およびその決定方法を提供すること。
【解決手段】本発明の姿勢角決定装置は,各リンクに設定された3軸直交座標系の各軸について,軸方向と重力ベクトルの方向との間の角度である傾斜角を取得する傾斜角取得部と,第1リンクと第2リンクとの姿勢関係を固定したまま最大3通りの全体姿勢を取らせる姿勢変化指示部と,各全体姿勢における各リンクについて各軸方向の傾斜角から傾斜ベクトルを求める傾斜ベクトル算出部と,各リンクについて全体姿勢ごとに求められた傾斜ベクトルにより傾斜行列を求める傾斜行列算出部と,傾斜行列算出部により求められた各リンクの傾斜行列に基づいて,一方と他方の逆行列との積を求めることにより,姿勢角を表すリンク行列を算出するリンク行列算出部とを有する。
(もっと読む)
ヘッドモーショントラッカ装置及びその使用方法
【課題】 交流磁気方式のHMT、光学方式のHMTにおいて測定不可のときに、移動体に設定された基準方向に対する頭部角度を算出することができるヘッドモーショントラッカ装置及びその使用方法を提供する。
【解決手段】 磁気方式又は光学方式モーショントラッカにより搭乗者の頭部角度を含む第一相対頭部情報を算出する主頭部情報算出部とを備えた移動体センサと、移動体センサに基づいて移動体の動きを表す絶対移動体情報を算出する絶対移動体情報算出部と、頭部センサと、頭部センサの出力信号に基づいて移動体と頭部との動きとを合成した絶対頭部情報を算出する絶対頭部情報算出部と、絶対移動体情報と絶対頭部情報とに基づいて第二相対頭部情報を算出する副頭部情報算出部と、主頭部情報算出部による第一相対頭部情報の算出が不適当な領域において副頭部情報算出部により第二相対頭部情報を算出する切替部とを備える。
(もっと読む)
視線方向判定装置
【課題】運転者の顔の向きを精度よく判定可能な視線方向判定装置を提供すること。
【解決手段】シート3,5、6の着座者の視線方向を判定する視線方向判定装置1において、着座者の頭部とヘッドレスト5との間の頭部距離を検出する頭部距離検出手段30と、頭部距離検出手段30により検出された頭部距離に基づき着座者の視線方向を判定する視線方向判定手段20と、を有することを特徴とする。
(もっと読む)
内部検査装置
【課題】管路計測や孔内計測において、管路や地盤等の内部状況を的確に把握可能な内部検査装置を提供する。
【解決手段】ピッチ角、方位角、ロール角を検出する角度検出器2と、この角度検出器2の管内又は孔内の壁面に対する踊り量を検出する非接触変位センサ3,4と、を有し、管路内又は地盤に形成された孔内に挿入され、内部を移動可能な内部検査装置1であって、該管路内又は孔内を撮影する撮影手段を先端に備える構成とする。
(もっと読む)
ユーザの姿勢をモニタするための装置
【課題】
ユーザの姿勢をモニタ及び追跡し、ユーザの姿勢における欠陥を矯正するためにフィードバックを行う装置を提供する。
【解決手段】
本発明の装置はユーザによる着用が可能な装置であって、各々がユーザの身体の少なくとも一部分の位置に関する指標を提供するための複数のセンサ素子と、合成位置信号を提供するために、その複数のセンサ素子の各々によって提供される位置に関する各指標を受信するための受信機とを含む。個々のセンサの読取り結果が、すべて、更なる分析のために外部エンティティに送られる。センサは、ユーザの身体の少なくとも一部分の曲りを測定するために種々のロケーション又は位置に設置される。
(もっと読む)
水圧鉄管の厚み測定装置及びその厚み測定方法
【課題】長さが長い水圧鉄管の厚み測定に適しており、その厚み測定を経済的かつ安全に行うことが可能な水圧鉄管の厚み測定装置及びその厚み測定方法を提供する。
【解決手段】水圧鉄管11の内面12に吸着する複数の車輪13及び走行距離計18を備えた台車14と、水圧鉄管11の塗膜厚み及び総厚みの測定に使用する各センサー22、23を備える計装部19とを有し、計装部19は台車14と分離可能になって、計装部19には更に、台車14の前方、後方、及び各センサー22、23を撮像するカメラ27、28、32と、水圧鉄管11の清掃手段21と、台車14の傾きを検知する角度センサーと、計装部19の送電及び信号通信を行うケーブル31と、その巻取手段42が設けられている。その測定方法は、上流側から下流側へかけて下方へ傾斜又は垂直に配置された水圧鉄管11の上流側に厚み測定装置10を配置した後、下流側へ向けて走行させる。
(もっと読む)
姿勢角検出装置及び姿勢角検出用プログラム
【課題】 測定対象部分の動きに拘らず、その姿勢角を正確に測定可能にすること。
【解決手段】 測定対象部分の回転角速度を検出するジャイロセンサ12と、前記測定対象部分における直交二方向の加速度をそれぞれ検出する加速度センサ13と、ジャイロセンサ12及び加速度センサ13からの検出値に基づいて、前記測定対象部分の姿勢角を演算する演算手段15とを備えて姿勢角検出装置10が構成されている。演算手段15は、ジャイロセンサ12の検出値から、所定周波数以上の高周波成分における対象方向の回転角度を求める角速度処理部17と、加速度センサ13の検出値から、所定周波数未満の低周波成分における前記対象方向の回転角度を求める加速度処理部18と、これら角速度処理部17及び加速度処理部18で求めた各回転角度を加算して前記姿勢角を求める姿勢角決定部20とを備えている。
(もっと読む)
21 - 40 / 54
[ Back to top ]