
Fターム[2F069GG13]の内容
測定手段を特定しない測長装置 (16,435) | 測定方式 (4,762) | 直接測定 (274) | 測定点の位置 (62) | 3点、4点 (36)
Fターム[2F069GG13]に分類される特許
21 - 36 / 36
板状材の塗工方法

【課題】吐出ノズルから吐出される塗工液で形成される塗工面を適正かつ確実に管理することが可能であって、ひいては塗膜厚も適切に管理でき、塗工面の品質管理を高い作業効率で確保することが可能な板状材の塗工方法の提供を目的とする。
【解決手段】板状材1Sに形成した塗工面LSと吐出ノズル4との間の距離を測定するための測距手段6a〜6cを予め備えておき、まず、テーブル2に試験用の板状材を設置して、テーブルとノズルホルダー5とを相対的に前方へ向かって移動させて当該試験用板状材に試験塗工を行い、次いで、テーブルとノズルホルダーとを相対的に後方へ向かって移動させる過程で、測距手段により測定を行い、次いで、所望の塗工面LSを得るために、測距手段による測定結果に応じて、ノズル位置調整手段3a〜3cにより吐出ノズルの位置調整を行い、その後、板状材1Pに塗工処理を行う。
(もっと読む)
非接触ブレード振動測定装置及び方法
回転ブレード(10)で形成されたローター(3)の外周にセンサー(6,7,8,9)が配置され、信号検出ユニット(14)及び評価ユニット(13)を備えた非接触ブレード振動測定装置であって、ローターの位置及び/またはハウジングの歪みを測定するために供給される、ことを特徴とする、非接触ブレード振動測定装置。
さらに、本発明に係る方法は、非接触ブレード振動測定のために特定された方法である。本発明は、先行技術の技術的な問題を回避し、非接触ブレード振動測定のための、改良された装置及び改良された方法を提供する。特に、本発明における改良によって、ローターの半径方向への移動とハウジングの歪み(楕円変形)の測定データへの影響が回避されるようになり、すべての条件下で振動解析に対する高い振幅解析能を保つことができる。
【代表図】図1 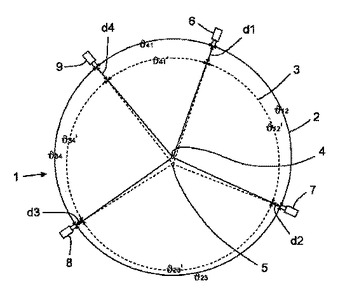 (もっと読む)
(もっと読む)
曲がり形状測定方法および装置

【課題】鋼管などの円筒状長尺材料で、特に局所的な曲がりが小さい材料の、材料全長に亘る空間的に長波長の曲がり形状を高精度で求めるのに適した、曲がり形状測定方法および装置を提供することを目的とする。
【解決手段】材料が距離d/m(mは自然数)だけ搬送される毎の変位測定値を得、これらの測定値と前記材料の軸方向d/m間隔の形状データS1、S2、S3、…を関連付ける方程式を立て、前記材料の局所的な形状変化Si−2Si+1+Si+2(i=1、2、3、…)の前記材料全長に亘る2乗和が最小になるように上記方程式を解く。
(もっと読む)
測定装置、測定基準及び精密工作機械
【課題】本発明は平面形状の高精度測定を変位計の走査によって実現することを課題とする。
【解決手段】面上の半径rの円に沿う凹凸を変位計Dbの回転走査で測定するときに,回転中の軸方向の出入りを検出する変位計Daと,変位計Da,変位計Dbの測定点を結ぶ直径上の,半径Rの円に沿う走査測定をする変位計Dc,変位計Dd,合計4本を用意して,半径Rの円が描かれる面が回転走査軸と同心で,前記半径rの円に対して相対的に180度回転した位置にも反転設置できる基準円輪SC上にある形にし,基準円輪SCの反転操作の前後の回転走査における4本の変位計の出力から,合計6つを選んで用いることで,走査のための回転運動誤差と半径rの円と半径Rの円に沿う凹凸形状を分離同定する。この結果得られた円に沿う凹凸形状と,別の方法を用いて複数の直径上で得られた直線に沿う凹凸形状とを数学的に合成すると平面を正しく構成することが可能となる。
(もっと読む)
リソグラフィ装置およびデバイス製造方法
【課題】リソグラフィ装置の高精度変位測定システムを提供する。
【解決手段】放射ビームBを調節するように構成された照明システムILと、パターニングデバイスMAを支持するように構成され、特定のパラメータに従ってパターニングデバイスを正確に位置決めするように構成された第一位置決めデバイスPMに接続されたマスク支持構造体MTとを含む。リソグラフィ装置は、基板Wを保持するように構成され、特定のパラメータに従って基板を正確に位置決めするように構成された第二位置決めデバイスPWに接続された基板テーブル(例えばウェーハテーブル)WTも含む。
(もっと読む)
円筒状基体上の塗膜の膜厚測定方法及び測定装置
【課題】円筒状基体上に設けられた塗膜又は被膜の厚みを測定する際に、測定によって前記基体にかかる負荷を少なくし、個々の測定値を極めて正確にする。
【解決手段】円筒状基体外表面の変位が測定可能な測定手段を用いて、前記円筒状基体外表面の軸に対して直交する前記円筒状基体外表面の断面円内に設定した基準点に対する前記断面円の円周上に定められた3つ以上の点の距離の前記円筒状基体の回転による変化に基づいて、前記基準点と前記円周上の点との距離を算出して前記円筒状基体外表面の断面円の形状、円中心、真円度、外径値を特定し、且つ、前記塗膜又は被膜外表面の変位が測定可能な測定手段を用いて、前記3つ以上の点とは別の、前記断面円と同一の断面上且つ前記塗膜又は被膜の外表面上の1つ以上の点と前記基準点との距離を算出し、前記円筒状基体外表面の断面円の形状をもとに前記塗膜又は被膜の厚みを測定する方法を提供する。
(もっと読む)
回転精度測定方法
【課題】
3個の変位計間の相対角度が正確であるかどうかを評価することができ、回転軸の回転ムラを補正することができ、変位計の中心位置が回転軸上の同じ測定部位を指しているかどうかを評価することができ、ひいては3点法の特性を有効にかつ容易に活用して回転軸の回転精度を測定することができる回転精度測定方法を提供する
【解決手段】
それぞれの中心位置が回転する測定対象物の外周面上の同一回転軌跡上にあるように配置した3個の非接触型の変位計のプローブによって前記測定対象物の回転運動を測定し、前記測定対象物の回転精度成分と前記測定対象物の形状成分とを含む前記変位計の出力信号を処理して前記形状成分を分離して前記測定対象物の回転精度を測定する方法であって、前記処理の前に前記変位計の出力信号における前記回転の回転速度のムラを補正する
(もっと読む)
逐次3点法における零点誤差補正方法及び零点誤差補正装置
【課題】実体基準を用いずに複数の変位センサにより、形状情報と測定の際の運動誤差を同時に検出し、演算処理でそれらを分離し取り出すことができる逐次3点法における零点誤差補正方法及び零点誤差補正装置を提供する。
【解決手段】
逐次3点法により、被測定物100、変位センサ31〜33を相対移動させて、変位センサ31〜33の検出出力に基づき、逐次3点法による被測定物100の表面形状を演算する。被測定物200を反転する前及び反転した後のそれぞれにおいて、被測定物100,200と、変位センサ41,42,32を相対移動させて、該変位センサの検出出力に基づいて、反転法による被測定物100の表面形状を演算する。逐次3点法と反転法による被測定物100の表面形状の演算結果に基づいて零点誤差補償量を算出し、該零点誤差補償量により、逐次3点法による零点誤差補正を行う。
(もっと読む)
駆動装置
【課題】 移動体の位置検出ポイントが広い間隔をあけて複数存在する場合でも、移動体を高い精度で位置決めすることができる駆動装置を提供する。
【解決手段】 磁界を発生させる磁界発生部材7と、磁界を検出する第1,第2,第3の磁界検出素子6A,6B,6Cから成る磁界検出手段6と、磁界発生部材7を移動させる圧電アクチュエータPとを備える。磁界検出手段6での検出結果に基づいて磁界発生部材7と磁界検出手段6との相対的な位置決めを行う際、磁界発生部材7が移動する可動範囲において、所定領域では第1,第2の磁界検出素子6A,6Bの検出結果に基づいて第1の位置決めを行い、所定領域から離れた所定ポイントでは第3の磁界検出素子6Cの検出結果に基づいて第2の位置決めを行う。
(もっと読む)
回転角度検出装置
【課題】主に自動車のステアリングの回転角度検出等に用いられる回転角度検出装置に関し、簡易な構成で、正確な回転角度の検出が可能なものを提供することを目的とする。
【解決手段】第一及び第二の検出体2、4と補助検出体21の各回転速度を異なるものとし、第一及び第二の検出手段8、10、第二の検出手段10と補助検出手段25、第一の検出手段8と補助検出手段25からの各検出信号により、制御手段26が回転体1の仮の角度を各々演算し、これらの演算値θ1、θ2、θ3が所定範囲内であった時に、演算値θ1を回転体1の回転角度θとして検出することによって、各検出体や検出手段の異常の検出が可能となり、簡易な構成で、正確な回転角度の検出が可能な回転角度検出装置を得ることができる。
(もっと読む)
トー角度測定装置及び測定方法
【課題】車両の設置位置が標準位置から大きくずれている場合であっても確実且つ高精度にトー角度を測定する。
【解決手段】トー角度測定装置10における測定ユニット18は、車両14のハブ16を着座台48に着座させると共に、第2ベース部材36に対して車幅方向及び平面視回転方向に移動自在な着座テーブル46と、該着座テーブル46から外側方に向かって延在する鉛直な測定面68を備える被測定部材70と、第2ベース部材36を基準として測定面68に対向するように設けられ、間隔y1だけ離れた2箇所から測定面68に対する距離x1、x2を計測する非接触距離センサ62a、62bとを有する。測定面68は、車幅方向に対して角度βの鋭角をなす向きに設定されている。
(もっと読む)
トンネル内空変位計測システム、トンネル内空変位計測方法およびトンネル内空変位計
【課題】 トンネル断面の巨視的な内空変位を常時実用上十分な計測精度で得ることを可能とすると共に、簡単な機構でメンテナンスフリーを可能とする。
【解決手段】 トンネル内空変位計測システムは、覆工41に植設された支柱421〜429の各基端部に棒状変位計411,416,421,426,431,436,441,446の各端部、支柱421〜429の各先端部に棒状変位計413,414,423,424,433,434,443,444の各端部、支柱421〜429の各基端部と各先端部に棒状変位計412,415,422,425,432,435,442,445の各端部をそれぞれピン結合する。棒状変位計411〜416,421〜426,431〜436,441〜446からの軸方向変位に応じた信号に基づきトンネルの下端部の既知の2節点を基点として順次、3つの棒状変位計の交点座標を連続的に算出してトンネルの変状を測定する。
(もっと読む)
測定装置、測定方法、測定システム、測定プログラム、および測定プログラムを記録した記録媒体
【課題】 複雑な気液二相流の界面微細構造と輸送機構を解明できる測定装置を提供する。
【解決手段】 測定装置は、気液二相流中に配置され、該気液二相流における気相および液相を検出するセンサからの出力信号を受信するセンサ出力受信部と、上記センサ出力受信部によって受信された出力信号に基づいて、上記気液二相流における気相と液層との間の界面に関する物理特性を算出する測定演算部とを備える。測定演算部は、6つのセンサから、4つのセンサからなるセンサセットを3セット分設定し、センサ出力受信部は、各センサからの出力信号を受信する。そして、測定演算部は、各センサからの出力信号に基づいて、上記界面の3次元速度を算出する。
(もっと読む)
ロールオーバー時の接地箇所判定装置および接地箇所判定方法
【課題】 ロールオーバー時に車体上部の接地箇所に対応して適正に乗員保護装置を作動できるようにしたロールオーバー時の接地箇所判定装置の提供を図る。
【解決手段】 ロールオーバー時にルーフRの初期接地箇所の変形を変形検出手段20で検出し、この変形検出手段20の出力信号によりルーフRの接地箇所を判断し、その変形箇所に応じて保護装置作動手段30で特定の乗員保護装置1A,1Bを作動することにより、ロールオーバー時の接地箇所に適正に対応した乗員保護装置1A,1Bの作動が可能となっており、変形検出手段20を、ルーフRの初期接地箇所に応じた信号波形を出力するセンサ20A〜20Dとしたことにより、ロールオーバー時の実際のルーフRの接地箇所を精度良く検知し、特定の乗員保護装置1Aまたは1Bの誤作動を防止して乗員保護効果を高めることができる。
(もっと読む)
油井管用特殊ねじ継手のねじ部の検査方法
【課題】 NGS によりねじ部の径を直接測ることにより、ねじ干渉量を直接管理して焼付き防止を図ることのできる手段を開発する。
【解決手段】 完全ねじ部、ピン先端近くの不完全ねじ部、ピン切り上り部の不完全ねじ部の少なくとも3箇所のねじ外径を測定する。ボックスについてもピンの測定位置に相対する場所でねじ内径を測定する。
(もっと読む)
表裏面の偏心及び傾きの測定方法及びその装置
【課題】 レンズ等の表裏面の偏心及び傾きを高精度に測定する表裏面の偏心及び傾きの測定方法及びその装置を提供する。
【解決手段】 レンズ202と真球203a,203b,203cの形状を表面側及び裏面側から測定可能な被測定物保持治具201を用いてレンズ202の三次元形状データと真球203a,203b,203cの中心点座標を測定し、真球203a,203b,203cの中心点座標を基準にレンズ202の表裏面の三次元形状データを合成し、レンズ表裏面合成データからレンズの表面と裏面との間の偏心及び傾きを算出する。
(もっと読む)
21 - 36 / 36
[ Back to top ]