
Fターム[2F069GG41]の内容
測定手段を特定しない測長装置 (16,435) | 測定方式 (4,762) | 速度、角速度、加速度を積分するもの (124)
Fターム[2F069GG41]に分類される特許
81 - 100 / 124
情報処理プログラムおよび情報処理装置
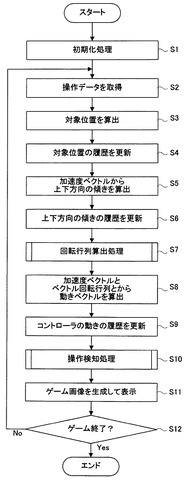
【課題】加速度センサを備える装置の姿勢を正確に算出する。
【解決手段】コントローラは、所定の撮像対象を撮像するための撮像手段と、当該入力装置に加わる加速度を検出する加速度検出手段とを備えている。ゲーム装置は、撮像手段によって撮像された撮像画像に含まれる撮像対象の画像に関する当該撮像画像内における傾きに基づいて、撮像手段の撮像方向を軸とした回転に関するコントローラの傾きを第1の傾きとして算出する。さらに、ゲーム装置は、加速度検出手段によって検出された加速度に基づいて、撮像方向と異なる方向を軸とした回転に関する傾きを第2の傾きとして算出する。ゲーム装置は、第1の傾きおよび第2の傾きをコントローラの姿勢として用いて所定の処理を実行する。
(もっと読む)
センサのミスアラインメント検知および測定システム
ミスアラインメント検知センサアセンブリを提供し、これは、第1の軸に沿う検知方向を有する前方監視センサと、第1の軸と所定の関係にある第2の軸に沿う加速度を検知する慣性センサとを備えている。ミスアラインメント検知システムは、ミスアラインメント検知センサアセンブリと、信号処理システムとを用いて、第1の軸とセンサアセンブリの前方動作方向との間のミスアラインメント角度を計算する。前方監視センサアセンブリの角度ミスアラインメントを検知する方法についても開示し、本方法では、前方監視センサアセンブリの検知の軸と所定の関係を有する軸に沿う加速度を測定し、測定した加速度を所定の閾値と比較する。 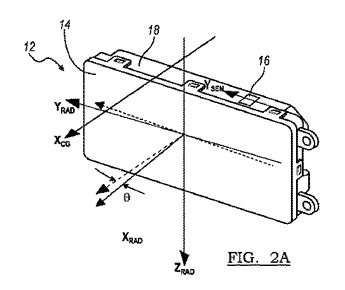 (もっと読む)
(もっと読む)
車長検出装置

【課題】装置を簡素化でき、車長そのものを検出することができ、車路の狭い場所においても設置条件の制約が少ない車長検出装置を提供する。
【解決手段】本発明の車長検出装置10は、車路1において車両走行方向の第1位置Aにおける車両3の存在を検出する第1センサ11と、第1位置Aから車両走行方向下流側に所定距離Lをおいた第2位置Bにおける車両3の存在を検出する第2センサ12と、第1位置Aと第2位置Bとの離間距離L、離間距離Lを車両3が移動するのに要した時間、及び第1センサ11もしくは第2センサ12が車両3を検出していた時間に基づいて、車長CLを算出する処理装置14と、を備える。
(もっと読む)
車長計測システムおよび車長計測方法
【課題】 大規模な改装工事を施すことなく、車両の長さを自動測定するための設備を導入することのできる車長計測システムおよび車長計測方法を提供すること。
【解決手段】 車両2の前後に配備された第一,第二の狭域通信用無線通信装置3,4と計測所7に設置された計測所側狭域通信用無線通信装置8およびコンピュータ9を利用し、簡便な狭域通信によって車両2の長さを測定することで、計測所7の周囲に大規模な改装工事を施すことなく、車両2の長さを自動測定する。
(もっと読む)
変形可能な幾何学的形態のプロセスと取得デバイス
【課題】変形可能材料によって規定された幾何学的形態の取得プロセスを提供する。
【解決手段】変形可能な幾何学的形態のプロセスおよび取得デバイス。センサ(1)のセットがこの形態(曲面または表面)上に置かれる。その状況で、それぞれのセンサがこのセンサの位置でのその形態の方向を表現する信号を供給し;その形態のモデルが選択され;その信号に基づいて、モデルのパラメータが決定され、センサを隔てる距離が測定され;そしてモデルと距離測定とのパラメータに基づいて、その形態の点の空間的配置が決定される。本発明は特に、機械加工、建具、石積み加工、および構造加工の分野に適用される。
(もっと読む)
管路位置の検出方法
【課題】本発明は、管路位置計測装置の姿勢・方位角センサーを最終地点で180°旋回させて計測することにより、管路位置の誤差を高精度に除去することを目的とする。
【解決手段】本発明による管路位置の検出方法は、管路位置計測装置(3)が管路(1)の出発地点(4)から最終地点(5)に到達した状態で、姿勢・方位角センサー(7)を180°旋回させた後に元に戻し、姿勢・方位角のX軸ベクトルと速度方向ベクトルの平行度誤差を管路(1)の位置の誤差として補正する方法である。
(もっと読む)
姿勢角決定装置およびその決定方法
【課題】複雑な関係にある座標系間であってもその姿勢関係を容易に,精度良く求めることのできる姿勢角決定装置およびその決定方法を提供すること。
【解決手段】本発明の姿勢角決定装置は,各リンクに設定された3軸直交座標系の各軸について,軸方向と重力ベクトルの方向との間の角度である傾斜角を取得する傾斜角取得部と,第1リンクと第2リンクとの姿勢関係を固定したまま最大3通りの全体姿勢を取らせる姿勢変化指示部と,各全体姿勢における各リンクについて各軸方向の傾斜角から傾斜ベクトルを求める傾斜ベクトル算出部と,各リンクについて全体姿勢ごとに求められた傾斜ベクトルにより傾斜行列を求める傾斜行列算出部と,傾斜行列算出部により求められた各リンクの傾斜行列に基づいて,一方と他方の逆行列との積を求めることにより,姿勢角を表すリンク行列を算出するリンク行列算出部とを有する。
(もっと読む)
剛体電車線凹凸測定装置
【課題】構造が簡単で、測定操作が比較的に容易であり、しかも凹凸を高精度で簡易に測定することができる剛体電車線凹凸測定装置を提供する。
【解決手段】本発明の剛体電車線凹凸測定装置は、レール2上を移動する自走式架線工作車1に固定される固定枠6と、この固定枠6に対して可動する可動枠7と、可動枠7に固定されて剛体電車線のパンタグラフ摺接面との間の変位を非接触状態で測定する計測するレーザ変位センサ10と、レーザ変位センサ10の上下振動の加速度を計測する上下加速度センサ9とからなる。
(もっと読む)
ヘッドモーショントラッカ装置及びその使用方法
【課題】 交流磁気方式のHMT、光学方式のHMTにおいて測定不可のときに、移動体に設定された基準方向に対する頭部角度を算出することができるヘッドモーショントラッカ装置及びその使用方法を提供する。
【解決手段】 磁気方式又は光学方式モーショントラッカにより搭乗者の頭部角度を含む第一相対頭部情報を算出する主頭部情報算出部とを備えた移動体センサと、移動体センサに基づいて移動体の動きを表す絶対移動体情報を算出する絶対移動体情報算出部と、頭部センサと、頭部センサの出力信号に基づいて移動体と頭部との動きとを合成した絶対頭部情報を算出する絶対頭部情報算出部と、絶対移動体情報と絶対頭部情報とに基づいて第二相対頭部情報を算出する副頭部情報算出部と、主頭部情報算出部による第一相対頭部情報の算出が不適当な領域において副頭部情報算出部により第二相対頭部情報を算出する切替部とを備える。
(もっと読む)
タイヤの転動時たわみ量算出方法、タイヤの転動時データ蓄積方法及びタイヤの転動時接地長算出方法
【課題】タイヤトレッド部の加速度の計測時系列データに基づいて、高速データ処理によりタイヤの走行時たわみ量を算出する。
【解決手段】転動中のタイヤのラジアル方向のタイヤ周上の加速度の計測時系列データを取得する取得ステップと、取得したタイヤ周上の計測時系列データから接地近傍の加速度データを抽出し、この加速度データを、1つの極値を有し、その両側で0に漸近する曲線を有するピーク形状を表すたわみ関数の二階微分関数を用いて最小二乗回帰させてたわみ関数のパラメータの値を定める最小二乗回帰ステップと、前記たわみ関数のパラメータの値を用いて定まるたわみ関数から接地たわみ量を算出する算出ステップと、を含む。
(もっと読む)
誤差補正の方法
座標計測機を使用する加工対象物測定値の誤差補正の方法であって、加工対象物を測定するステップと、所定の誤差関数、検索テーブルまたはマップから再現可能な測定誤差を決定するステップと、加工対象物が測定される際に、少なくとも加速度の関数を測定し、及び、再現不可能な測定誤差を計算するステップと、トータルの誤差を決定するために、再現可能及び再現不可能な誤差を結合するステップと、加工対象物の測定値を補正するために、トータルの誤差を使用するステップとを有する。 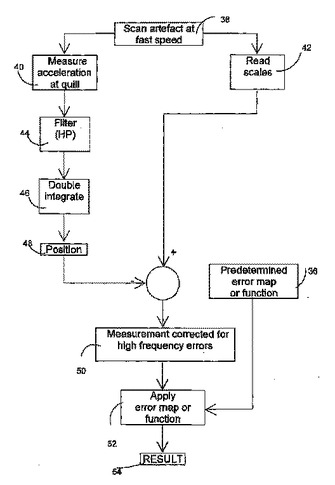 (もっと読む)
(もっと読む)
オートバイのロール角を決定する装置及び方法
路上でカーブするとき、オートバイ1のロール角を決定する装置である。該装置は、ロールレート信号を供給する第1ジャイロセンサ11と、ヨーレート信号を供給する第2ジャイロセンサ12と、速度センサ36とを含む。該装置は、第1中間ロール角の値を得るため、ロールレート信号を積分し、ヨーレートと乗り物の速度とから、第2中間ロール角の値を決定するように構成される。カーブするときにオートバイ1がロールする際、ビームパターンが水平レベルを維持するように、ヘッドランプの向きを調整するため、前記装置は、2つの中間ロール角の値を組合せて、サーボ50により使用され得るロール角の出力値にする。  (もっと読む)
(もっと読む)
帯状体の表面欠陥検査装置
【課題】帯状体表面の欠陥を、蛇行しているときにも検出できること、及び欠陥の大きさ、種類、形状も認識できること。
【解決手段】ガイドロール(4)(5)に巻装されて走行する磁気テープ(3)に対向して配設されるラインCCDカメラ(6a、6b、6c、6d、6e)と、磁気テープ(3)を照射する光照射手段(9)と、磁気テープ(3)の走行速度を検出するパルス発生器(11)と、ラインCCDカメラの撮像した画像を処理する画像処理手段(7a、7b、7c)とを具備し、画像処理手段(7a、7b、7c)は少なくとも磁気テープ(3)の一方の縁部と表面上の欠陥を認識させ、パルス発生器(11)の出力に基づく磁気テープ(3)の走行方向における欠陥の位置と、縁部から欠陥までの距離とを演算するようにした。
(もっと読む)
モーションキャプチャー装置およびそれに係る方法
本発明はN個の関節化されたセグメントで構成されるある構造体の運動を捕捉するための装置に関し、以下の特徴的構成を有する。
− 連続的に時間tkにおいて、基準を形成するある基準座標系におけるランク
少なくとも出力する第一の手段(ML)、ここで、kは1か、または1より大きい整数である、そして、
− 様々なセグメントにわたって分布し、ランク1からランクnの各セグメン
本発明は生体力学の解析、遠隔操作、ある人物のアニメーション等に応用される。
(もっと読む)
関節式プローブヘッド装置および方法
測定プローブ(12)を支持する関節式プローブヘッド(10)を含む、座標位置決め機用の装置が記載される。関節式プローブヘッド(10)は少なくとも1つの電動機(40、42)を含む。関節式プローブヘッド内において熱を発生させる加熱手段が提供される。この加熱手段は、電動機(40、42)または別個の加熱エレメントとすることができる。1つまたは複数の温度センサ(46、48)など、関節式プローブヘッド(10)の温度を決定する温度感知手段も提供される。この装置は、関節式プローブ(10)ヘッドの温度を制御することを可能にする。 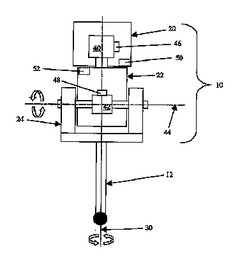 (もっと読む)
(もっと読む)
取扱装置の工具の動きを追跡するための装置及び方法
【課題】 取扱装置の工具の動きを追跡するための装置及び方法を提供することである。
【解決手段】 取扱装置(2)の工具の動きを追跡するための装置(1)であって、上記工具に位置合わせされ、追跡されることができる少なくとも1つの方向性放射器(5)と、動きを決定するための信号評価装置(4)を有する装置(1)が記載される。上記方向性放射器(5)は固定された空間平面に対して調節可能な角度で方向性ビーム(6)を位置合わせさせるためのアクチュエーター、及び上記信号評価装置(4)に接続され、上記空間平面に対する現在の方向性ビームの角度を決定するための角度センサーを有する。
(もっと読む)
座標測定機械及び座標測定機械を操作するための方法
本発明は、座標測定機械を操作するための方法及び座標測定機械に関し、この場合、少なくとも1つの電気モータMによって駆動される座標測定機械の座標測定装置、特に測定ヘッドは、少なくとも1つの方向に動くことが可能である。電気モータMの運動、このようにして、座標測定装置の運動を行うために、電気モータMを通して(ラインC11、C21の電流回路を介して)流れる駆動電流が測定される。電気モータMの運動又は座標測定装置5の運動が進行すべき目標速度に基づいて及び/又は目標加速度に基づいて、駆動電流について限界値が検出される(コンピュータPC及び/又はマイクロコントローラMCで)。駆動電流が検出された限界値IΤに達した場合及び/又は駆動電流が検出された限界値IΤを超えた場合、例えば、コンピュータPC又はマイクロコントローラMCが、電流回路に配置されたスイッチSW1、SW2の一方をオフにすることによって、座標測定装置5は所定の状態に設定される。  (もっと読む)
(もっと読む)
プレス金型の動的変形測定法及び動的変形測定システム
【課題】プレス加工に係る上型と下型の動的変形を絶対的に捉え、プレス成型品に成型不良が発生した場合の金型の修正に迅速に対応できるようにする。
【解決手段】上型7および下型8に複数の測定ポイントを設定して、その各測定ポイントに加速度センサSa,Sbを配置し、上型7と下型8の両者にプレス荷重を作用させたときの加速度センサSa,Sbの出力(加速度信号)を数値解析装置10に入力する。数値解析装置10では、加速度信号を補正回路15Aに通して加速度センサSa,Saの出力電圧変動による誤差を補正した後、その加速度信号を積分回路15Bにより積分して速度信号を生成する。又、積分回路15Bの出力を補正回路15Cに通して数値解析上の誤差を補正した後、その速度信号を積分回路15Dにより積分して変位信号を生成する。そして、その変位信号を数値化あるいはグラフ化して表示装置20に表示する。
(もっと読む)
形状/加速度測定機器および装置
本発明は、少なくとも2つの場測定センサ対を有する、センサアレイを提供しており、2自由度における場計測が可能である、各センサ対は、2以上の自由度で柔軟基板に搭載されており、場測定センサは、地盤、構造体および生体の動的及び静的形状の精度、及び動的及び静的振動の精度を計測又は改善するために、基板にそって2自由度の方位データを提供する。本発明は、場測定センサにより実現される精度を更に改善するために、追加的な非場測定センサを更に追加する。 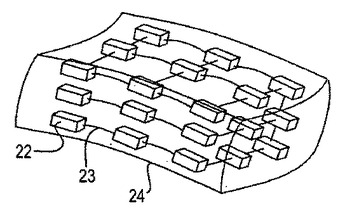 (もっと読む)
(もっと読む)
乗員保護装置のためのロール角算出の方法および装置
本発明は乗員保護装置のためのロール角算出方法および関連する装置に関する。本発明によれば、車両の横加速度(ay)と垂直加速度(az)が検出され、検出された横加速度(ay)と検出された垂直加速度(az)に基づいて車両のロール角(α)が推定され、その際に、さらに車両速度(v)、ヨー角(ψ)および横滑り角(β)を含む他の走行動特性値が求められ、ロール角(α)の推定を改善するために、前記走行動特性値から向心加速度(v2/r)が計算される。  (もっと読む)
(もっと読む)
81 - 100 / 124
[ Back to top ]