
Fターム[2F069GG41]の内容
測定手段を特定しない測長装置 (16,435) | 測定方式 (4,762) | 速度、角速度、加速度を積分するもの (124)
Fターム[2F069GG41]に分類される特許
21 - 40 / 124
枕木変位計測システム
【課題】枕木の変位量を簡単に計測でき、変位量から道床・路盤の状態を客観的に判定することができるため、軌道の保守点検作業においてより一層の効率化および信頼性の向上を図ることができる枕木変位計測システムを提供する。
【解決手段】レールを締結固定する枕木に沿った水平方向と、レールに沿った垂直方向と、これら2つの方向に直交する重力方向との三軸方向の加速度を検出する三軸加速度検出手段と、その検出結果における不要な(衝撃・定常)成分を除去するフィルタと、この不要な成分を除去されたデータに対し、積分演算を施して枕木の変位量を算出し、その変位量から必要変位波形を抽出して得た必要変位波形から最大変位量を算出する手段とを具備する変位量測定装置を設け、列車が通過する際の列車全体に対する枕木の変位波形および変位の最大値、変位に伴う三軸方向の最大加速度を計測可能とした。
(もっと読む)
偏心測定装置

【課題】モータを運転した際に、モータから振動や騒音、うなりを生じる場合、モータを取り外して、偏心の有無や、偏心の状態を確認する必要があった。
【解決手段】モータを取り外すことなく、固定子フレームに3個またはそれ以上の個数の加速度センサを取り付け、センサから得られる周波数成分を解析することで、モータの偏心の有無や、偏心の状態を測定することを特徴とする。本発明により、モータの偏心の測定が容易にできることとなる。
(もっと読む)
ゴルフアドレス調整システム
【課題】アドレス姿勢確認システムを提供する。
【解決手段】ゴルフアドレス姿勢確認システムは、位置情報を取得する測位装置を含む第1、第2測定部を備える。2つの測定点における位置情報に基づいて、2つの測定点を結ぶ直線を特定する制御部を備える。告知部を備える。第1測定部は使用者の一方の肩に取り付けられる。第2測定部は使用者の他方の肩に取り付けられる。制御部は、アドレスに入る前に、使用者が第1位置に移動した時に第1測定部を使って得た第1位置情報と、第2位置に移動した時に第1測定部を使って得た第2位置情報とに基づいて、第1直線を特定する。アドレスに入る時に、特定の時間間隔で、第1特定部で取得した位置情報と、第2測定部で取得した位置情報とに基づいて、使用者の両肩を結ぶ第2直線を特定する。制御部は、第1直線と第2直線とが平行な状態にあるか否かを判断し、告知部は、制御部による判断結果を使用者に告知する。
(もっと読む)
軌道解析装置、軌道解析方法
【課題】微小な動きから、大きな動きまで正確に検出可能とする軌道解析装置および軌道解析方法を提供する。
【解決手段】物体に固定され、角速度センサーと、少なくとも2個の加速度センサーと、を備える慣性センサーを備える姿勢検出部と、検出データを増幅しA/D変換するデータI/F部と、データを処理する演算部と、演算結果に基づき、前記加速度センサーのどちらか一方の加速度センサーを選択するセンサー制御部と、選択された前記加速度センサーを含む前記慣性センサーからの出力データから姿勢データを生成し、送出する姿勢データ生成部と、を備える姿勢検出装置と、前記姿勢検出装置からの前記姿勢データを解析する解析部と、前記姿勢データおよび解析結果を保存する保存部と、前記解析結果を通知する通知部と、を備える解析装置と、前記姿勢検出装置と前記解析装置との通信手段と、を含む軌道解析装置。
(もっと読む)
カメラ校正装置
【課題】周囲の景色によらずカメラの撮像方向を校正することができるカメラ校正装置を提供する。
【解決手段】イメージセンサ140を有するカメラ120と、イメージセンサ140と既知の位置関係にある加速度センサ150と、イメージセンサ140が静止しているときに加速度センサ150によって検知された傾きとイメージセンサ140が移動しているときに加速度センサ150によって検知された傾きとに基づいて、カメラ120の撮像方向を算出するカメラ校正部160とを備える。
(もっと読む)
操舵角検出装置および操舵角検出方法
【課題】測定作業の容易化およびコストダウンを図る上で有利な操舵角検出装置および操舵角検出方法を提供する。
【解決手段】ステアリングホイール2の非円形部2Dは、ステアリングシャフト方向、すなわち、回転軸方向から見て回転軸の周りに非円形を呈している。操舵角検出装置10は、ステアリングホイール2の非円形部2Dの回転軸の半径方向における変位量と、ステアリングホイール2の回転方向とを検出すると共に、変位量と操舵角とを対応付けたデータテーブルから操舵角を特定して出力すると共に、操舵角の特定は、検出された変位量と、直近の操舵角と、ステアリングホイール2の回転方向とに基づいて行う。
(もっと読む)
携帯機器および設置可否判定方法
【課題】 設置対象物の寸法測定機能を有する携帯機器、および、その携帯機器を使っての設置対象物の設置予定場所への設置の可否を判定する設置可否判定方法に関し、設置予定場所への設置が可能か否かを事前に通知させる。
【解決手段】 設置対象物の寸法を認識する寸法認識部と、設置対象物の設置予定場所、および設置予定場所へ至る搬送経路上の設置対象物通過の妨げとなり得る箇所の各寸法を記憶する寸法記憶部と、寸法認識部で寸法が認識された設置対象物を、搬送経路を通過して設置予定場所に設置することが寸法的に可能か否かを判定する設置可否判定部と、設置可否判定部での判定結果を通知する判定結果通知部とを有する。
(もっと読む)
鉄道軌道の曲率・曲線半径測定方法
【課題】測定範囲を低速域にまで広げることができる鉄道軌道の曲率・曲線半径測定方法を提供する。
【解決手段】鉄道軌道の曲率・曲線半径測定方法において、軌道検測車に角度計をセットし、この角度計により計測した情報に基づいて鉄道軌道の2点の接線の相対角度を求め、一方、前記軌道検測車に車輪回転計をセットし、この車輪回転計により計測した情報に基づいて前記鉄道軌道の2点間の距離を求め、前記鉄道軌道の2点間の相対角度及び前記鉄道軌道の2点間の距離を所与の計算式に代入して計算結果を求め、この計算結果にローパスフィルタ処理を施す。
(もっと読む)
慣性測定法による軌道検測装置の低速時精度補償方法及びその装置
【課題】 軌道検測車の低速走行時における慣性測定法の精度低下を補償し、測定下限速度を引き下げることができる慣性測定法による軌道検測装置の低速時精度補償方法及びその装置を提供する。
【解決手段】 慣性測定法による軌道検測の低速時精度補償装置において、慣性測定で得られる加速度・角度・変位の信号を位相補償・波形変換器6で得て、軌道検測車1の低速時には位相補償・波形変換器6から分岐して低速時精度補償部8によって演算し、軌道検測車1の低速時における出力として軌道狂いを計測する。
(もっと読む)
検査装置および設置判定方法
【課題】設置後の被検査物体の使用状況を考慮して設置スペースに被検査物体が設置可能か否かを判定すること。
【解決手段】入力部102は、設置スペースを規定する多面において、被検査物体を構成する多面のうち正面に対応する面を設定し、設置スペースを規定する各面について、被検査物体の操作部及び可動部の設置を許可するか否かを設定し、判定部106は、被検査物体における操作部及び可動部の設置状況と、入力部102における設定結果とを比較することにより、被検査物体を構成する多面のうち正面を、設置スペースを規定する多面のうち正面として設定された面に向けた場合に、設置スペースに被検査物体が設置可能か否かを判定する。
(もっと読む)
画像から平面を検出する平面検出装置及び検出方法
【課題】車両の揺動が激しい場合でも、射影変換行列Hの初期値を短時間かつ正確に推定することができる画像から平面を検出する平面検出装置及び検出方法を提供する。
【解決手段】移動体の姿勢角を検出するステップと、検出した姿勢角を用いて記憶された平面の法線ベクトルnを修正するステップとを有する。法線ベクトルnを修正するステップにおいて、前時刻(t−1)における姿勢角を用いてカメラ座標系Cの法線ベクトルn(t−1)を慣性座標系Eの法線ベクトルnE(t−1)に変換し、次いで、現時刻(t)における姿勢角を用いて慣性座標系Eの法線ベクトルnE(t−1)をカメラ座標系Cの法線ベクトルn(t)に変換する。
(もっと読む)
軌道検測のための検出器ユニット
【課題】
光学的変位センサを搭載する検出器ユニットを堅牢な構造にしなくても台車に取付けることが可能で一般の営業車両にも取付けることができるように小型軽量化した軌道検測のための検出器ユニットを提供することにある。
【解決手段】
この発明は、レールの横断方向、すなわち、台車の横梁方向に沿って設けた収納ケースに内装する内装フレームを水平板フレームとこれから起立する垂直板フレームで構成し、光学的変位センサは垂直板フレームの両端にそれぞれ設ける。内装フレームの両端を緩衝部材を介して収納ケースに取付け、質量が大きいジャイロを水平板フレームの中央部付近に搭載する。
(もっと読む)
測定方法及び測定装置
【課題】簡便な方法で又簡単な装置で、移動体に設定された測定点、測定点間の距離の測定、或はGPS、IMU等の座標系に対するオフセット量を測定する。
【解決手段】移動体1に対して設定した座標系に対して所定の関係に測定棒6を設置し、該測定棒6の所定位置を移動体1が設置されている地面に転写すると共に測定対象物の測定点を地面に転写し、転写された前記所定位置と転写された前記測定点間の地面上での距離を測定し、距離測定結果に基づき測定点と前記測定棒6の地面上での関係を求め、得られた関係と前記座標系に対する測定棒6との関係から前記測定点の前記座標系に於ける水平座標面での位置を求める測定方法に係り、又前記所定位置と地面、前記測定点と地面との鉛直距離を測定し、前記座標系に於ける前記測定点の3次元位置を測定する。
(もっと読む)
動き検出装置および方法
【課題】 動き検出装置および方法を提供する。
【解決手段】 1つ以上の第1回転角測定センサを用いて第1角を測定し、1つ以上の第2回転角測定センサおよび前記1つ以上の第1回転角測定センサと相違する1つ以上の2軸の角速度センサを用いて第2角を推定し、1つ以上の第3回転角測定センサおよび前記1つ以上の2軸の角速度センサを用いて前記2軸のうちのいずれか1つである第3角を推定する動き検出装置を提供する。
(もっと読む)
関節角度計測装置
【課題】従来の関節角度計測装置は、ビデオカメラによって被験者を撮影するスペースや、画像解析を行うコンピュータ等が必要となるので、設備が大がかりなものとなり、製品コストが増大している。
【解決手段】本発明による関節角度計測装置は、例えば上腕及び前腕や腰及び上腿等の関節を挟む第1及び第2部位に第1及び第2慣性センサ1,2が取付けられ、信号処理器3の信号回路34がcos−1(X1・X2+Y1・Y2+Z1・Z2)の演算を行うことで関節の曲げ角度φを算出する構成である。
(もっと読む)
携帯端末
【課題】 空間的に離間した複数の撮影点で同じ対象物を被写体として撮影して撮影点間の相対位置を判定することができる携帯端末を提供する。
【解決手段】 被写体を撮影して静止画像を生成するカメラ16と、カメラ16の光軸の向き及び光軸を中心とする傾きを検出する姿勢検出部32と、静止画像から特徴点を抽出する特徴点抽出部24aと、静止画像内の特徴点に対応する被写体上の点及び当該静止画像の撮影が行われた撮影点間の距離を測定する距離測定部25と、第1撮影点で撮影された第1画像内の特徴点について測定された距離、第2撮影点で撮影された第2画像内の上記特徴点について測定された距離、並びに、第1撮影点及び第2撮影点でのカメラ16の向き及び傾きの各検出結果に基づいて、第1撮影点に対する第2撮影点の相対位置を判定する位置判定部26により構成される。
(もっと読む)
地図画像統合データベース生成システム及び地図画像統合データベース生成プログラム
【課題】移動体に固定された軸を使用せず、任意の方向にある撮影対象物の位置を取得することができる撮影対象位置特定装置、地図画像統合データベース生成装置及び撮影対象位置特定プログラムを提供する。
【解決手段】撮影装置10が撮影対象を撮影すると、制御装置16は、この画像情報とともに、撮影装置10のシャッターに同期あるいは非同期で角度距離計測器12が計測した撮影装置10の撮影位置と撮影対象との距離データと撮影装置10の撮影方向の方位角及び仰俯角を取得する。また、上記シャッターに同期あるいは非同期で、座標計測装置14から撮影装置10の撮影位置の座標情報を取得する。次に、制御装置16は、上記取得した、距離データ、方位角及び仰俯角のデータ及び座標情報のデータに基づいて、撮影対象の座標情報を演算する。また、撮影対象の画像情報及びその座標情報は、互いに関連付けて出力する。
(もっと読む)
角度測定の方法およびそれを実施するための角度測定ジャイロシステム
【課題】検出信号のノイズ、ドリフトを最小にする角度測定の方法を提供する。
【解決手段】既定の算出され推定された一組のパラメータに基づいて一組の推定された信号を算出するために状態観測器231を構成し、ジャイロスコープ21に関連した動的方程式を使用してそのゲインを算出し、算出されたゲインに基づいて、推定された一組のパラメータを算出する。一組の検出信号は、検出モジュール22によって生成され、これと推定された一組のパラメータから推定された信号が算出される。また、状態観測器231によって算出された推定されたパラメータにおける位置および速度に基づいて前記ジャイロスコープ21の回転角φを算出するための角度計算機233とを含む。
(もっと読む)
位置決定システム
本発明は、オブジェクト(2)の位置を決定するための位置決定システム(201)に関する。第一位置検出ユニット(205)が、送受信ユニット(203、214、216、217)によってオブジェクト(2)と基準位置に対して知られている転送位置との間で転送される放射に基づいて、オブジェクト(2)の第一の位置を検出する。第二位置検出ユニット(35)が、オブジェクト(2)の加速度および決定された前記第一の位置に基づいて第二の位置を検出する。出力ユニット(12)が、第一の位置および第二の位置の少なくとも一つを出力する。放射の転送が遮られても、第二の位置が出力ユニットによって出力されることができる。さらに、第一の位置が、第二の位置を決定するまたは第二の位置を更新するための初期値として使用されることができる。これはオブジェクトの位置決定の品質を改善する。 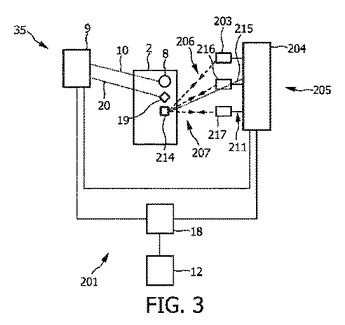 (もっと読む)
(もっと読む)
物理量検出装置、手ぶれ補正装置及びカメラ
【課題】比較的簡単な構成でありながら、重力加速度の影響が補正された物理量を検出可能な物理量検出装置、手ぶれ補正装置及びカメラを提供すること。
【解決手段】物理量検出装置1は、第1の周波数信号906を出力する第1の発振部10、第2の周波数信号908を出力する第2の発振部20、第2の発振部20に対する発振制御電圧904を生成する発振制御部50、第1、第2の周波数信号の位相差を検出して速度検出信号902を生成する速度検出部40、物理量検出信号910を生成する検出信号生成部30を含む。第1、第2の振動子の少なくとも一方は発振周波数が変化する加速度検出素子であり、発振制御部は、制御信号912に基づいて、第2の周波数信号の周波数を第1の周波数信号の周波数と一致させるように発振制御電圧を生成するか保持するかを選択し、検出信号生成部は、保持された発振制御電圧と速度検出信号に基づいて物理量検出信号を生成する。
(もっと読む)
21 - 40 / 124
[ Back to top ]