
Fターム[2F069GG41]の内容
測定手段を特定しない測長装置 (16,435) | 測定方式 (4,762) | 速度、角速度、加速度を積分するもの (124)
Fターム[2F069GG41]に分類される特許
101 - 120 / 124
移動体の高精度姿勢検出装置
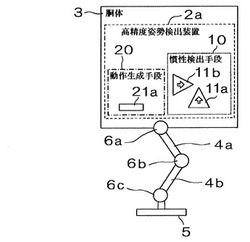
【課題】 移動体に搭載した慣性センサ出力の中から移動体の姿勢演算に不要な慣性成分を除去して、移動体の姿勢検出を精度良く検出することのできる移動体の高精度姿勢検出装置を提供する。
【解決手段】 移動体の高精度姿勢検出装置は、移動体に、当該移動体の慣性を検出する慣性検出手段と、当該移動体の動作を生成する動作生成手段と、姿勢演算を行う演算処理手段を備え、演算処理手段により慣性検出手段の出力と動作生成手段の出力に基づき移動体の姿勢を高精度に検出する。
(もっと読む)
姿勢角検出装置及び姿勢角検出用プログラム

【課題】 測定対象部分の動きに拘らず、その姿勢角を正確に測定可能にすること。
【解決手段】 測定対象部分の回転角速度を検出するジャイロセンサ12と、前記測定対象部分における直交二方向の加速度をそれぞれ検出する加速度センサ13と、ジャイロセンサ12及び加速度センサ13からの検出値に基づいて、前記測定対象部分の姿勢角を演算する演算手段15とを備えて姿勢角検出装置10が構成されている。演算手段15は、ジャイロセンサ12の検出値から、所定周波数以上の高周波成分における対象方向の回転角度を求める角速度処理部17と、加速度センサ13の検出値から、所定周波数未満の低周波成分における前記対象方向の回転角度を求める加速度処理部18と、これら角速度処理部17及び加速度処理部18で求めた各回転角度を加算して前記姿勢角を求める姿勢角決定部20とを備えている。
(もっと読む)
路面性状測定装置
【課題】一台でキメ深さやIRIを測定できる多機能の路面性状測定装置であって安価かつ高精度なものを車載可能とすべく、移動距離計の測定値からタイヤ変形等の悪影響が取り除かれるようにする
【解決手段】車両に移動距離計15と高さ計16と高さ計51と演算部20とを搭載する。高さ計16,51には、排水用凹部の開口幅より短い第一基準長Nに対応した狭い範囲を測定するものを、採用する。演算部20は、移動距離測定値ΔSと高さ測定値K,Jとに基づき踏面算出を行って第二基準長M対応のIRIを算出し、移動距離測定値ΔSと高さ測定値Kとに基づき踏面算出を行わないで第一基準長N対応のキメ深さ等を算出し、更に基準長Mだけ離れた高さ計16,51での路面形状について相関を算出して選択的に移動距離測定値ΔSを校正する。
(もっと読む)
方位角計測装置および移動体
【課題】簡素で安価な構成でなおかつ精度の高い方位角計測装置を備えた移動体を提供する。
【解決手段】駆動車輪の回転速度を計測する駆動輪回転速度計測手段と、前記回転角速度推定値ωA312を出力できるジャイロセンサと、前記駆動輪回転速度からオドメトリによって前記回転角速度推定値ωBを計算する運動学演算手段と、前記回転角速度推定値ωA312と前記回転角速度推定値ωB412とを逐次選択する回転角速度推定値選択手段と、前記回転角速度推定値選択手段403の出力を積分する積分器404と、からなる移動体の方位角計測装置を構成し、前記回転角速度推定値選択手段403が常に信頼性の高い回転角速度推定値を出力するようにした。
(もっと読む)
斜度入力装置
【課題】平面がなくても、空中の任意の一点で座標情報の入力を行うことができるようにした位置入力装置を提供する。
【解決手段】本体10が空中の任意の一点で前後左右に傾斜したとき二軸加速度センサ10aは、二軸の傾きをそれぞれ電圧差として検出して、ADコンバータと制御部で移動方向と移動量に変換し出力する。
(もっと読む)
車用静電センサー
【構成】多様な形態の電極(12)を使用した乗員センサーシステムが開示されている。電極(12)はエアバッグ噴出口(44)に隣接して設置でき、それぞれの電極は乗員の近接度に対応する信号を提供する。このシステムは1信号の場合よりも適切な決定を下すことができるように複数の信号を比較するコンパレータをさらに含んでいる。電極(12)を誘電基材(16)上に形成し、電極間をブロックするように提供された接地領域(14)で分離することができる。電極(12)を、片面に導電コーティングを施した誘電材料に取り付けられた導電材料で形成することができる。電極(12)を内装体内に接地導電材料と隣接させて埋設し、1電極にDC電圧を印加して第2電極への導電通路を形成することができる。その導電通路は湿気で提供される。ドライブ電極(22)とレシーブ電極(26)は車の窓と一体的に形成することができる。 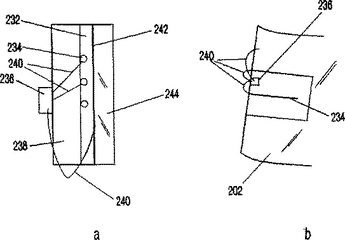 (もっと読む)
(もっと読む)
車輪浮き上がり状態判定装置、車両転覆回避装置、車両耐転覆性評価装置、車輪浮き上がり状態判定方法、車両転覆回避方法、および車両耐転覆性評価方法
【課題】車輪が浮き上がる直前や直後の車輪の状態を把握し、車両が路面を走行する際の車輪の浮き上がりを高精度に検知することが可能な車輪浮き上がり状態判定装置、路面からの車輪浮き上がりによる車両の転覆を回避する車両転覆回避装置、車両の耐転覆性能を評価する、車両耐転覆性評価装置および車両耐転覆性評価方法を提供する。
【解決手段】車両が路面を走行する際、転動中のタイヤが前記路面から外力を受けることで発生する、前記転動中のタイヤの所定の部位の加速度データを取得し、この加速度のデータを用いて、車輪の路面への接地状態を表す接地量評価値を算出し、この接地量評価値に基づき、前記車輪の路面からの浮き上がり状態を判定する。
(もっと読む)
傾斜角度計測装置
【課題】 傾斜角度検出手段の出力が飽和することに起因して、その飽和状態からの復帰後も演算手段の演算による傾斜角度が異常値を示すことを回避する。
【解決手段】 移動体Aの傾斜角度を検出する傾斜角度検出手段45の出力と、その傾斜方向での移動体Aの角速度を検出する角速度検出手段46の出力とに基づいて、移動体Aの傾斜角度を演算する演算手段48を備えた傾斜角度計測装置を、予め設定した閾値に基づいて傾斜角度検出手段45が飽和状態か否かを判別し、傾斜角度検出手段45が飽和状態でない場合には、演算手段48が、角速度検出手段46の出力に対する演算処理を行って、角速度検出手段46の出力に基づく演算値を更新し、傾斜角度検出手段45が飽和状態である場合には、演算手段48が、角速度検出手段46の出力に対する演算処理を停止して、角速度検出手段46の出力に基づく演算値を固定するように構成した。
(もっと読む)
鋼板の平面形状計測方法および装置
【課題】 悪環境下でもローラテーブル上を搬送される鋼板の平面形状を自動的且つ高精度に計測可能な、鋼板の平面形状測定方法および装置を提供する。
【解決手段】 ローラテーブル1上を搬送される鋼板2の搬送方向と直交する方向の鋼板2の幅を測定する幅計3と、鋼板2の搬送方向の長さを測定する、レーザドップラー速度計4A、4Bを用いた第1測長計4と、鋼板2の搬送方向の長さを測定する、搬送テーブルロール9に取り付けられたPLGを用いた第2測長計5と、第1測長計4および第2測長計5による鋼板2の長さ測定値の何れかを選択する判定器6と、幅計3による鋼板2の幅測定値と判定器6により選択された鋼板2の長さ測定値とに基づいて、鋼板2の平面形状を計測する平面形状計7とを備え、判定器6は、レーザドップラー速度計4A、4Bによる鋼板速度が異常値である場合に、第2測長計5による鋼板2の長さ測定値を選択する。
(もっと読む)
非破壊検査用プローブおよびこれを含む非破壊検査装置
【課題】 被検体の形状や検査の状況を問わず、容易かつ高精度にプローブの位置検出を行うことができる非破壊検査プローブおよびこれを含む非破壊検査装置を提供すること。
【解決手段】 被検体の傷や状態を検査するための検査部と、この検査部を収納する収納部とを備え、ケーブルを介して検査装置本体に接続されて用いられる非破壊検査用プローブ1において、前記収納部に、互いに直交するX軸およびY軸によって規定されるXY平面上の前記検査部の動きを検出する検出手段38が設けられていることを特徴とする。
(もっと読む)
加速度センサを用いる地盤等の変位モニタリング方法
【課題】 不動点を必要とすることなく、加速度計測値を2回積分することによって正しい変位を求め、高精度で地盤や人工構造物等の変位モニタリングが行えるようにする。
【解決手段】 地盤等に加速度センサを設置し、そ計測値を2回積分することにより計測点での地盤等の変位を算出しモニタリングする方法である。加速度計測値を積分するに際してカルマンフィルタによって算出したトレンド成分を補正値として用い除去することで1回積分を実行し、加速度記録を速度記録に変換する第1のステップと、算出された速度記録に対して、再度カルマンフィルタによるトレンド成分を算出し、これを除去して再度積分計算を行うことで速度記録を変位記録に変換する第2のステップを具備している。
(もっと読む)
周期運動体の移動軌跡算出方法及び装置
【課題】 歩行中の人体など周期運動を行う対象物の移動軌跡を、容易に且つ精度良く把握することができる周期運動体の移動軌跡算出装置を提供する。
【解決手段】 周期運動体に取り付けられた加速度センサ2の検出信号に基づいて、該周期運動体の移動軌跡を算出する装置であって、検出信号に対してフィルタ処理を施して、低周波成分が除去された加速度データを生成するフィルタ処理手段10と、加速度データを積分して得られた仮の速度データに対する一次回帰直線を求め、該一次回帰直線を用いて仮の速度データを補正することにより、補正速度データを生成する速度データ算出手段12と、前記補正速度データを積分して得られた仮の位置データに対する二次回帰曲線を求め、該二次回帰曲線を用いて前記仮の位置データを補正することにより、補正位置データを生成する位置データ算出手段14とを備える。
(もっと読む)
測定装置、測定方法、測定システム、測定プログラム、および測定プログラムを記録した記録媒体
【課題】 複雑な気液二相流の界面微細構造と輸送機構を解明できる測定装置を提供する。
【解決手段】 測定装置は、気液二相流中に配置され、該気液二相流における気相および液相を検出するセンサからの出力信号を受信するセンサ出力受信部と、上記センサ出力受信部によって受信された出力信号に基づいて、上記気液二相流における気相と液層との間の界面に関する物理特性を算出する測定演算部とを備える。測定演算部は、6つのセンサから、4つのセンサからなるセンサセットを3セット分設定し、センサ出力受信部は、各センサからの出力信号を受信する。そして、測定演算部は、各センサからの出力信号に基づいて、上記界面の3次元速度を算出する。
(もっと読む)
位置計測システム
【課題】 移動体の位置検出にあたり、多数のアクセスポイント設置が不要で、携帯に適した低消費電力の端末を用いて高精度の位置計測が行える位置計測システムを提供すること。
【解決手段】 移動体の位置検出を行う位置計測システムであって、
自身で位置計測を行う位置検出センサと、位置検出センサの測定データを逐次格納するセンサ情報格納部と、センサ情報格納部に格納されたセンサ情報を外部に間欠的に送信する通信部を備え、移動体とともに移動する移動端末と、
移動端末が移動可能な位置検出対象領域内に設けられ、移動端末との間で通信を行い、移動端末から送信されるセンサ情報を受信する通信部、とで構成されたことを特徴とするもの。
(もっと読む)
状態検出装置およびその状態算出方法
【課題】 状態センサの応答速度が遅い場合でも、速い応答速度で状態量を取得することができ、かつ状態速度センサのオフセットがある場合でも発散することなく状態量が取得できる状態検出装置とその状態算出方法を得る。
【解決手段】 本発明の状態検出装置は、状態速度センサ1の情報とオフセット補正値との差分Aを算出する第1演算器34と、算出差分Aを積分し積分値を算出する積分器31と、積分値に対し状態センサ1の応答遅れと等しいフィルタ値を算出する遅れフィルタ32と、前記フィルタ値と前記状態センサの情報との差分Bを算出する第2演算器35と、前記差分Bとゲインとの積を前記オフセット補正値とし、前記差分Bを前記積分値から差し引いた値を状態量検出値4とする第3演算器32とを設けたものである。
(もっと読む)
タイヤ変形量算出方法及びタイヤ変形量算出装置
【課題】路面上を転動するタイヤの変形量を、タイヤの所定の部位、例えばトレッド部における加速度の計測データを用いて算出する。
【解決手段】少なくともタイヤ回転1周分の加速度の計測データから、タイヤの変形に基づく加速度の時系列データを抽出する。この後、抽出した加速度の時系列データに対して2階の時間積分を行って変位データを求めて、タイヤのトレッド部における変形量を算出する。特にタイヤのトレッド部の変形量を算出する場合、トレッド部の周上の領域を、路面との接地領域を含む領域とこれ以外の非接地領域とに分け、非接地領域の加速度の計測データ及び変位データのそれぞれを近似した第1の近似曲線及び第2の近似曲線を算出し、加速度の計測データ及び求めた変位データからそれぞれ第1の近似曲線及び第2の近似曲線のそれぞれを差し引くことで、タイヤの変形量に基づく加速度の時系列データを抽出し、トレッド部における変形量を求める。
(もっと読む)
レーザ加工装置
【課題】 レーザ加工装置において加工ヘッドを被加工面へアプローチする際、アプローチ動作中の状況に応じた迅速で最適な制御を可能にすると共に、制御系の遅れによるオーバーシュートを抑制し、短時間で信頼性よく目標位置に収束させる。
【解決手段】 被加工面位置6aを検出すると共に、加工ヘッドの位置制御に用いるその時点の位置指令4aをフィードバックして、アプローチ終了までの上記加工ヘッドに対する残り位置指令分に対応する距離8aを演算し、この残指令距離8aに対応する速度指令13aを予め設定された最大加速度および最大速度とに基づいて演算し、該速度指令13aを位置指令4aに変換して、加工ヘッドの移動を位置制御する。
(もっと読む)
パイプラインの形状計測評価方法及びその装置
【課題】 長距離の計測においても精度の高い線形計測が可能なパイプラインの形状計測評価方法及びその装置を提供する。
【解決手段】 パイプラインの始点及び終点におけるピグ本体の姿勢を予め取得しておき、始点におけるピグ本体の姿勢に対して、ピグ本体の走行によって得られた姿勢変化角を順次累積して始点から終点までの順方向の姿勢データを求めるとともに、終点におけるピグ本体の姿勢に対して、ピグ本体の走行によって得られた姿勢変化角を順次累積して終点から始点までの逆方向の姿勢データを求め、順方向の姿勢データと逆方向の姿勢データとを用いて姿勢誤差を低減した姿勢データを再計算し、再計算後の姿勢データを用いてパイプラインの線形形状を求める。
(もっと読む)
パイプラインの形状計測評価方法及びその装置
【課題】 重力鉛直偏差による重力誤差を極力抑え、長距離の測定でも十分な精度を確保することの可能なパイプラインの形状計測評価方法及びその装置を提供する。
【解決手段】 ピグ本体を静止状態として静止状態における加速度計の加速度データを取得し、その加速度データから重力方向を求め、この重力方向と地上の現在地点における緯度とから、パイプラインの線形形状の計測を開始する際に必要なピグ本体の初期姿勢角を算出し、この初期姿勢角を、加速度データから求められる重力方向と地球を密度一様な楕円体と仮定した場合の重力方向との偏差に基づく補正角によって補正し、その補正後の初期姿勢角を用いてパイプラインの線形形状を求める。
(もっと読む)
露光装置におけるミラー位置測定装置、露光装置におけるミラー位置制御装置、及び露光装置
【課題】 ミラーの絶対的な位置を測定することを可能にする、露光装置におけるミラー位置測定装置を提供する。
【解決手段】 3つの支持台(6a、6bの2つのみを図示)のそれぞれに、加速度センサ(14a、14bの2つのみを図示)が設けられている。これらの加速度センサは、3次元方向の加速度を検出することができる。これらの加速度センサの出力を2回積分することにより、ミラー7の3次元方向位置を3カ所で測定することが可能となる。積分された信号は、もとの信号に微小な誤差がある場合でも時間と共に累積されて大きな誤差となるので、所定のタイミングで、出力を、位置測定装置8の信号に合わせてやる。この際、位置測定装置8a。8b、8c等の取り付け位置と加速度センサ14a、14bの取り付け位置が異なることに伴う幾何学的な位置補正を考慮することは言うまでもない。
(もっと読む)
101 - 120 / 124
[ Back to top ]