
Fターム[2F069GG41]の内容
測定手段を特定しない測長装置 (16,435) | 測定方式 (4,762) | 速度、角速度、加速度を積分するもの (124)
Fターム[2F069GG41]に分類される特許
61 - 80 / 124
位置追跡システム、位置追跡装置、位置追跡方法およびプログラム
【課題】床センサにより検出される加圧位置と個々のユーザとを正確に対応付けられるようにすること。
【解決手段】床センサが計測した加圧位置をグループ化し、その重心位置をユーザの位置を示す一つの指標として用いる。そして、グループの重心位置と各ユーザの状態ベクトルとから3種類の接地モデル(右足接地モデル、左足接地モデル、両足接地モデル)を用いるパーティクルフィルタにより接地パタン(右足接地/左足接地/両足接地)を決定し、グループそれぞれにおける各ユーザの重み候補を算出する。そして、この重み候補を用いて、グループとユーザの対応関係を決定する。
(もっと読む)
センサの位置を決定するための方法及び装置

【課題】センサの空間位置を決定するための改善された方法及び改善された装置を提案する。
【解決手段】この装置及び方法は、センサの空間位置を決定するための方法及び装置であり、まず、センサの位置を大まかに検出することによって大まかな位置情報を決定し、次に、センサに搭載された少なくとも3つの反射器をレーザ追跡装置によって測定することによってセンサのより精確な位置を取得する。レーザ追跡装置のレーザが反射器を探索する探索領域は、大まかな位置情報を基準として制限される。
(もっと読む)
軌道狂い検測装置および軌道狂い検測方法
【課題】演算負荷が増大せず、且つ低速域でも所望の波長帯域が得られる軌道狂い検測技術を提供すること。
【解決手段】車両の水平方向の加速度に、所望の軌道狂い弦長、車両の走行速度およびサンプリング時間に応じたデータ数ずつ遅らせた各地点での車両の水平方向の加速度を順次加算して車両の水平方向の速度とする。続いて、演算後の車両の水平方向の速度に、所望の軌道狂い弦長、車両の走行速度およびサンプリング時間に応じたデータ数ずつ遅らせた各地点での車両の水平方向の速度を順次加算して車両の水平方向の位置とし、サンプリング時間に基づく係数を乗算した後に別途測定した加速度計とレールとの間の相対変位を加算して通り狂い量とする。同様に、車両の水平方向の加速度から高低狂い量を算出する。また、等時間サンプリングの代わりに等距離サンプリングでも本方法で軌道狂いを計算できる。
(もっと読む)
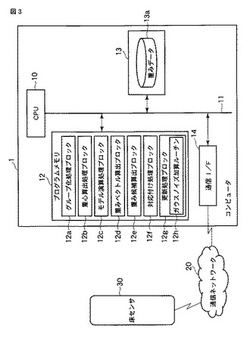
姿勢・移動軌跡検出装置、検出方法、プログラムおよび記録媒体
【課題】物体に装着したセンサノードからのデータを利用して物体の姿勢および移動軌跡を検出する。
【解決手段】姿勢・移動軌跡検出装置1は、物体が運動しているアクティビティ区間の前後の静止区間のセンサデータから物体の姿勢を静止区間の各々について推定する静止姿勢推定部13と、物体の姿勢に基づいてアクティビティ区間の各時刻における物体の姿勢を補間により推定する運動姿勢推定部14と、アクティビティ区間の各時刻について運動姿勢推定部14が推定した物体の姿勢における重力加速度を推定する重力加速度推定部15と、アクティビティ区間の各時刻についてセンサデータと重力加速度とから、外力により生じる物体の加速度を推定する運動加速度推定部16と、物体の加速度からアクティビティ区間における物体の移動速度および移動量を求める移動軌跡推定部17とを備える。
(もっと読む)
オブジェクト管理装置、携帯端末、および、オブジェクト操作方法
【課題】装置を小型化でき、短時間で効率的に作業空間を準備でき、処理内容決定処理の負荷を軽減し、ユーザが所望する処理内容をリアルタイムに決定し実行することができる、オブジェクト管理装置、携帯端末、および、オブジェクト操作方法を提供することを課題とする。
【解決手段】本発明は、画像撮影部116により携帯端末200と操作対象オブジェクトとの位置情報を取得し、取得された位置情報に基づいて、携帯端末200が特定の操作対象オブジェクトの特定領域内にある判定された場合、この操作対象オブジェクト上でユーザが携帯端末200を用いて行った所定の動作を、携帯端末200の変位検出部20にて物理量の変位として検出し、オブジェクト管理装置100へ送信し、受信した物理量の変位に基づいて、携帯端末200の表示部214上に表示された表示オブジェクトを用いて行う処理を規定する処理コマンドをリアルタイムに決定し実行する。
(もっと読む)
姿勢角検出装置
【課題】取付位置にずれが生じたときにも取付部位の姿勢角を正確に検出することができる姿勢角検出装置を提供する。
【解決手段】人体の部位100の姿勢角を検出する姿勢角検出装置10であって、姿勢角センサ20と、移動量検出手段31、32と演算手段60を備えている。姿勢角センサ20は、人体の部位100の表面に取り付けられ、自己の姿勢角を検出する。移動量検出手段31、32は、取付部位100の表面を移動したときの姿勢角センサ20の初期位置からの移動量を検出する。演算手段60は、検出された姿勢角を検出された移動量に基づいて補正する。
(もっと読む)
接触トリガー測定プローブ
工作機械などの座標位置決め装置のための測定プローブ(2)が、記述される。プローブハウジング(4)に撓み可能に設置される触針ホルダー(10)を含む。プローブハウジングに対する触針ホルダーの撓みを感知するために、1つ以上のセンサー(20)が設けられる。1つ以上のセンサー(46)により感知された撓みが撓みしきい値などのトリガー条件を満たしている時には、プロセッサ(22;40)は、トリガー信号(T)を生成する。プローブは、測定プローブの加速度を測定するための加速度計(28)も含む。プロセッサにより適用されるトリガー条件は、加速度計(28)により測定された加速度に応じて使用中に変更可能である。この方法において、誤トリガーは抑制される。 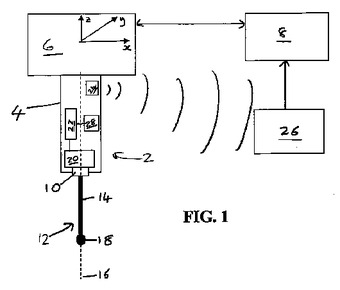 (もっと読む)
(もっと読む)
動き測定装置
【課題】コンパクトな構成で精度の高い動き測定を行う。
【解決手段】動き測定装置として機能するPCのプロセッサは、角速度センサおよび加速度センサから角速度および加速度をそれぞれ繰り返し取得し、取得された角速度を積算していく。そして、取得された加速度が加速度条件を満足したとき、積算結果をリセットする。
(もっと読む)
角度検出装置及び歩数計
【課題】 加速度センサを用いて構成が簡単で信頼性高く、小型化可能な角度検出装置を提供すること。
【解決手段】 各加速度センサ101a、101bは感度軸が相互に直交するように配置されると共に少なくとも動的加速度を検出して対応する検出信号を出力し、CPU108は加速度センサ101a、101bからの検出信号に基づいて、歩数計の筐体の傾きを算出する。CPU108は、前記傾きに応じて歩数計数に利用する増幅手段106a又は106bを決定して該増幅手段からの検出信号に基づいて歩数計数を行い、前記傾きに応じて歩数計数に利用する増幅手段106a又は106bのゲインを最適化し、利用しない増幅手段106a又は106bのゲインを小さくしてSN比及び歩数演算の精度向上を図る。
(もっと読む)
糸の速度を測定する方法及び装置
【課題】光ビームの照射領域に対して糸を正確に位置決めする必要のないドップラー干渉に基づいた糸の速度を測定する装置を提供する。
【解決手段】課題は、第1及び第2コヒーレント光波6a、6bを干渉させる、糸5の速度測定方法であって、ここで、第1光波6aは、糸5によって散乱させられた光を含み、そして、糸5に投射される第1光ビーム4aから生じた光波であるものとし、第2光波6bは、第2光ビーム4bから生じた光波であるものとし、そして、糸5の速度を光検出器8において光波6a、6b間のドップラー干渉から求めるものとする、前記方法において、糸5と接触させることなく、第2光ビーム4bを光検出器8へ導入させ、前記方法によって解決される。
(もっと読む)
センサユニット
【課題】姿勢等の高精度のセンシングが可能なセンサユニットを提供する。
【解決手段】姿勢及び動きを検出するジャイロユニット6、視野内の物体の相対姿勢及びその動きを検出する人工網膜IC7、周辺に存する音源の存在を検出する音響センサ8、D−GPS9、及びこれらのセンサの動作を制御するコントローラ5を可搬性の筐体に収容してセンサユニットを構成する。コントローラ5は、各センサ3〜9による検出結果を実時間で受け入れ、これらの検出結果を所定のメモリ領域上に形成された情報空間内に更新自在に記録し、記録された検出結果をもとに、情報空間内において自己に対する上記物体の位置、方向及び動き、つまり筐体と物体のどちらが動いたを特定するようにした。
(もっと読む)
車両用舵角推定装置及びそれを搭載した電動パワーステアリング装置
【課題】ステアリング機構で検出したSAT検出値(推定値)と、演算で求めたSAT演算値とを比較し、4輪だけでなく、2輪の回転速度のみからでもステアリング特性の変化を検知し、誤推定がなく、精度良く舵角若しくは絶対舵角を出力することができる車両用舵角推定装置を提供する。
【解決手段】車両の左右車輪の回転速度を検出する車輪回転速度センサを備える車両用舵角推定装置であり、車輪回転速度センサで検出した車輪回転速度に基づいて車輪からハンドルに作用する物理量を演算して出力する物理量演算部と、前記物理量及びSAT検出値若しくはSAT推定値に基づいて推定舵角を出力する推定舵角出力部とを設ける。
(もっと読む)
絶対変位検出方法及びその方法を用いた絶対変位センサ
【課題】 相対変位のポジティブフィードバックの困難な調整を必要とすることなしに極低周波数まで検出範囲を広げることができると共に絶対変位を安定して検出することができる絶対変位検出方法及びその方法を用いた絶対変位センサを提供すること。
【解決手段】 絶対変位センサ1は、被検出体としてのセンサハウジング2と、センサハウジング2にばね係数k及び減衰係数cをもって可動に支持された質量mを有した質量体3と、質量体3に対するセンサハウジング2の相対速度を電気的に検出する検出手段4と、相対変位をポジティブに、相対速度を一次微分して得られた相対加速度をネガティブに夫々フィードバックさせて、センサハウジング2の絶対変位に起因する質量体3の絶対変位を制御するフィードバック制御手段5と、相対変位に位相遅れ補償を施す位相遅れ補償手段6とを具備している。
(もっと読む)
実質的に不変な回転軸を検出するための方法および装置
【課題】以前の運動予測システムの欠点を解消し、かつ実質的に不変な回転軸を有する移動体の運動を処理するために特に適している方法を提案する。
【解決手段】3本の感知軸を有する少なくとも1つの慣性または磁気センサを備えている移動体の運動の実質的に不変な回転軸を検出するための方法は、前記センサの3本の感知軸に対する、異なる時間での少なくとも3つのサンプルを含む物理測定値を得るステップE10、E31と、物理測定値空間内で、実質的に不変な回転軸を予測するステップE11−E15、E32−E34と、前記予測された軸を、運動の実質的に不変な回転軸と同定するステップとを含む。実質的に不変な軸周りで回転する移動体の運動を予測するために特に使用される。
(もっと読む)
連接構造の動作をキャプチャするための処理方法
【課題】本発明は、センサを備えた連接構造の動作を特徴付けるシミュレートパラメータを得る方法に関する。
【解決手段】本発明の方法は、センサが与える測定値に各々相当する推定測定データを構造の推定動作状態パラメータから計算する段階と、センサが与える測定値とその測定値に相当する推定測定データとの間の差分を求める段階と、推定動作状態パラメータに関する少なくとも一つの推定差を得るために、前記差分から発生するデータをオブザーバタイプの包括的な数学的処理する段階と、シミュレートパラメータを形成するために、推定動作状態パラメータに関する推定差と、それに相当する推定動作状態パラメータとを加算する段階とからなる。
(もっと読む)
身体傾斜角計測器および身体ねじれ角計測器
【課題】回旋の測定に大いに役立つ身体傾斜角計測器および身体ねじれ角計測器を提供する。
【解決手段】第1腕22および第2腕23の先端21a、21bはそれぞれ身体の特定部位に突き当てられる。このとき、第1腕22および第2腕23はできる限り水平姿勢に維持される。第1腕22および第2腕23の接触が確保された時点でスイッチボタン32が押される。スイッチ回路は基準軸線17回りで測定開始位置を特定する。第1腕22および第2腕23は最初の測定部位から次の特定部位に移動する。第1腕22および第2腕23の先端は2番目の特定部位に突き当てられる。スイッチボタン32が押されると、スイッチ回路は基準軸線17回りで測定終了位置を特定する。測定開始位置および測定終了位置の間で基準軸線17回りに回転角は測定される。1つの身体傾斜角計測器11で傾斜角の測定および回旋の測定は実現される。
(もっと読む)
地震損傷計測システムおよび地震損傷計測方法
【課題】建築物全体の地震計測設備の設置が容易で、地震損傷評価も容易に行える地震損傷計測システムを得る。
【解決手段】本発明の地震損傷計測システムは、建築物の各層間3,10を貫通する昇降路4に設置されて、変位計5とターゲット7により昇降路4内の各層の層間変位を計測する層間変位計測手段と、計測された層間変位の分布により、建築物の健全性を評価する建築物健全性評価手段とを備える。
(もっと読む)
列車位置検知システム
【課題】この発明の課題は、列車の位置を正確に検知する列車位置検出システムを提供することである。
【解決手段】電線からパンタグラフを介して電力が供給される列車における前記列車の位置を検知するシステムであって、前記パンタグラフ上に設けられ、前記列車の走行中に前記列車と前記電線間の距離変化に追従して動き、垂直方向加速度を検知する加速度センサと、加速度センサが検知した加速度の大きさと規定値とを比較する比較手段と、前記比較手段の比較結果に基づいて、前記電線の支持点を検知する検知手段と、前記列車が走行する所定区間における前記支持点の位置情報を予め記憶している記憶手段と、前記検知手段により検知された支持点の数及び前記記憶手段に記録された前記位置情報に基づいて前記列車の位置を計算する計算手段とを有する。
(もっと読む)
電子機器装置、空間変位計算装置及び空間変位計算方法
【課題】画像が細かく振動して非常に見づらくなることを防止することができる電子機器装置、角速度センサ部を有する装置及び空間移動変位の計算方法を提供すること。
【解決手段】この電子機器装置は、回転方向の角速度に応じた第1の信号を出力する角速度センサと、前記第1の信号から手振れ成分である高周波を除去するためのローパスフィルタと、前記ローパスフィルタにより手振れ成分が除去された前記角速度センサから出力される第1の信号に基づき、空間移動による変位を計算する手段とを具備することを特徴とするものである。
(もっと読む)
天井クレーンレールの測量方法及び管理方法
【課題】天井クレーン走行レールの挙動を動的に測定し、天井クレーンの発生応力との相関性の大きい要素を正確に検出し、天井クレーン使用寿命の大幅な延長を図ることができる天井クレーン走行レールの測量方法及び管理方法を提供する。
【解決手段】天井クレーンが走行するランウェイガーダ上の左右の天井クレーン走行レールの勾配差を検出して管理する。より具体的には天井クレーンの両側のサドルあるいはそれらの近傍に、傾斜計10を設置して天井クレーン走行レール2上を走行させるか天井クレーン走行レールの測量範囲内に置いて、各サドルあるいはそれらの近傍の傾斜角度の変化から、ランウェイガーダ1上に設置された左右の天井クレーン走行レール2の勾配差を検出する。検出された左右の天井クレーン走行レール2の勾配差が許容値を越えたとき、天井クレーン走行レール2の補修を行う。
(もっと読む)
61 - 80 / 124
[ Back to top ]