
Fターム[2F069GG66]の内容
測定手段を特定しない測長装置 (16,435) | 測定方式 (4,762) | 測定子の数 (697) | 多数 (63)
Fターム[2F069GG66]の下位に属するFターム
Fターム[2F069GG66]に分類される特許
1 - 20 / 33
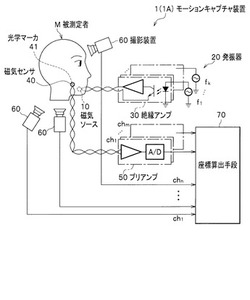
モーションキャプチャ装置およびモーションキャプチャプログラム
【課題】被測定者の動作の制約が少ない状態で舌の動きを計測することができるモーションキャプチャ装置およびモーションキャプチャプログラムを提供する。
【解決手段】モーションキャプチャ装置1は、被測定者Mの舌表面に貼付される磁気ソース10と、被測定者Mの顔表面に貼付され、磁気ソース10によって形成される磁場を検出する磁気センサ40と、被測定者の顔表面に貼付された磁気センサ40と同一の位置に配置された光学マーカ41と、光学マーカ41を異なる位置および異なる方向から撮影する複数の撮影装置60と、磁気センサ40によって検出された磁場の大きさと、撮影装置60によって撮影された光学マーカ41の画像とから、被測定者Mの舌表面に貼付された磁気ソース10の絶対座標を算出する座標算出手段70と、からなる。なお、磁気ソース10と磁気センサ40の位置は入れ替えてもよい。
(もっと読む)
3次元形状導出装置および3次元形状導出方法

【課題】センサネットワークを用い、カメラやレーザでは測定困難な部位の形状までも導出する。
【解決手段】3次元形状導出装置100は、自体の3次元位置またはそれに相当する物理量を示す位置情報を発信する流動自在な複数の位置センサ112と、複数の位置センサが発信した位置情報を受信するセンサ情報集約部114と、測定対象物102における複数の位置センサが存在する部分の3次元形状を、複数の位置センサの位置情報に基づいて導出する3次元形状導出部130とを備える。
(もっと読む)
多地点測定データ取得装置および多地点測定システムおよび多地点測定データ取得方法
【課題】圃場に埋設された複数のセンサユニットの位置を設置後に収集可能な多地点測定データ取得装置および多地点測定システムおよび多地点測定データ取得方法を提供する。
【解決手段】1本の伝送路に固定された複数のセンサユニットそれぞれによって前記伝送路を介して返される応答から、前記各センサユニットが固定された位置から前記伝送路の一端までの伝送路長と前記各センサユニットの固定位置における前記伝送路の屈曲方向に関する情報とを含む情報を抽出する情報抽出部と、前記情報抽出部で抽出された情報に基づいて、前記複数のセンサユニットの配置を推定する配置推定部とを備える。
(もっと読む)
形状推定システム、センタサーバ、形状推定方法、および形状推定プログラム
【課題】精度よく検出対象物に関する情報を推定する形状推定システム、センタサーバ、形状推定方法、及び、形状推定プログラムを提供する。
【解決手段】複数のセンサ端末201−1〜201−mのそれぞれは、センシングエリア内にある検出対象物を検出するとともに、当該検出対象物との距離に応じた強度を検出する検出部101と、前記検出部による検出結果をセンタサーバ401に送信する通信部102とを有し、前記センタサーバは、前記複数のセンサ端末から送信される前記検出結果を受信する通信部301と、前記複数のセンサ端末から送信される前記検出結果と記憶部303から読み出したセンシングエリア情報を用いて前記強度に応じて区分される複数のクラス毎に推定方程式を求め、当該複数の推定方程式に基づき連立方程式を解くことにより、前記検出対象物を表わす検出対象物情報を算出するデータ処理部302とを有する。
(もっと読む)
形状推定システム、角度推定方法及び対象物数推定方法
【課題】2次元平面上の対象物の形状の外周を構成する線分がなす内角を推定する。
【解決手段】複合センサノードは、予め定められた形状をなすように配備され、センシングエリア内における形状推定対象物の有無を検出する複数のセンサと、センサのそれぞれが検出した形状推定対象物の有無を示す検出結果情報をサーバに送信する送信手段とを備え、サーバは、形状推定対象物の頂点の内角がαの場合に、複合センサノードのうち、特定の複合センサノードが形状推定対象物を検出し、その他が検出しないセンシング結果となる複合センサノードの集合の測度を、複合センサノードのパラメータとαから計算する測度計算手段と、測度から内角α1,・・・,αn(nは内角の数)である場合のセンシング結果の期待値を計算する期待値計算手段と、センシング結果と期待値の差分を小さくする内角α1,・・・,αnを探索する探索手段とを備える。
(もっと読む)
掘削土留工における3次元計測システム
【課題】 掘削土留工の挙動を面的に評価できる土留壁の変位計測手法を用いることにより、構造物全体の挙動を把握するとともに、変位の原因を捉え易くする掘削土留工における3次元計測システムを提供することを目的とする。
【解決手段】
掘削土留工における3次元計測システムにおいて、土留壁10の面に配置される複数の高感度センサー11〜16と、この複数の高感度センサー11〜16の間を補完するように配置される複数の低感度センサー21〜80と、前記高感度センサー11〜16及び前記低感度センサー21〜80からの計測データを処理するデータ処理装置Aと、このデータ処理装置Aに接続される表示装置Bとを備え、前記土留壁10の面全体の変位データを計測し、前記土留壁10の面的な挙動を把握する。
(もっと読む)
測定装置及び測定方法
【課題】被測定物を精度良く測定が可能であるとともに、安価な測定装置を提供する。
【解決手段】長尺な被測定物Aの形状を測定する測定装置であって、ベース1と、前記ベース1の一方側に設けたビーム支持部2と、前記ビーム支持部2の上部にピン軸4によって一方側の両側部を支持し、他端側を傾動及び倒立可能に設けたビーム5と、前記ビーム5の一方端に設けられ、前記被測定物Aの一端を支持及び回転可能する支持部6と、前記ビーム5の他方端に移動可能に設けられ、被測定物の他端をクランプ及び回転可能するクランプ部7と、前記ベース1と前記ビーム5との間に設けたビーム傾動及び倒立用のアクチュエータ8と、前記被測定物Aに対向するように、前記ビーム上に移動可能に設けた寸法測定部10とを備える。
(もっと読む)
形状推定システム、センタサーバ、形状推定方法、及び、形状推定プログラム
【課題】位置が特定されないセンサの検出対象物の検出有無の情報により、検出対象物の検出部分の面積情報、形状種別情報、形状種別情報に応じた形状判定関数を用いずに、検出対象物の形状情報を推定する形状推定システム、センタサーバ、形状推定方法、及び、形状推定プログラムを提供する。
【解決手段】形状推定システムにおいて、センサノード装置201−1〜201−mがそれぞれ、所定のセンシングエリア内における検出対象物の有無を検出して検出結果をセンタサーバ装置401に送信し、センタサーバ装置401が、受信した検出結果に基づき算出する検出対象物を検出した検出センサ数と、センサノード装置201−1〜201−mの所定のセンシングエリアに関する情報と、面積あたりのセンサノード装置201−1〜201−mの設置密度情報とに基づき、検出対象物の形状に関する形状情報の推定値を算出する。
(もっと読む)
変状計測装置
【課題】従来の光式変位センサや電気式変位センサ(伸縮センサ)を用いて、これらの伸縮計の機構を変えることなく低コストかつ簡便な機構と1台の一軸方向検出変位センサで2区間の変位を計測し、また、少ない台数で多数区間の変位箇所を特定する面的変状計測装置を提供する。
【解決手段】2つの移動杭の変位状態を計測する装置において、固定杭に固定された一軸方向検出変位センサと、同変位センサに繋がれた接続線と同接続線の一端に設けた変位伝達機構と、両端がそれぞれ前記各移動杭に連結され中途が前記の変位伝達機構に揺動もしくは摺動自在に張設され且つ移動杭の変位に追従して非伸縮状態で全体移動自在に張設された計測線とから構成されたことを特徴とする。
(もっと読む)
位置追跡システム、位置追跡装置、位置追跡方法およびプログラム
【課題】床センサにより検出される加圧位置と個々のユーザとを正確に対応付けられるようにすること。
【解決手段】床センサが計測した加圧位置をグループ化し、その重心位置をユーザの位置を示す一つの指標として用いる。そして、グループの重心位置と各ユーザの状態ベクトルとから3種類の接地モデル(右足接地モデル、左足接地モデル、両足接地モデル)を用いるパーティクルフィルタにより接地パタン(右足接地/左足接地/両足接地)を決定し、グループそれぞれにおける各ユーザの重み候補を算出する。そして、この重み候補を用いて、グループとユーザの対応関係を決定する。
(もっと読む)
ロール角推定装置、及び電動パワーステアリング装置
【課題】一般乗用車に装備されやすいセンサを利用し、車体のロール角φを高精度に推定する。
【解決手段】例えばマルチ荷重センサ12により、左右輪に作用する垂直荷重WL及びWR、並びに横力FL及びFRを検出する。そして、左右輪に作用する垂直荷重WL及びWRに応じて、左右輪の荷重移動量ΔWを算出し、この荷重移動量ΔW、並びに横力FL及びFRに応じて、車体のロール角φを推定する。より正確に車体のロール角φを推定したければ、横力における、車輪進行方向に対する直角方向成分、つまりコーナリングフォースFcFL〜FcRRを用いる。
(もっと読む)
リンク型変位計の計測管理方法
【課題】一の計測器の不具合や故障を迅速かつ正確に検知するリンク型変位計の計測管理方法を提供する。
【解決手段】被計測対象またはその近接位置に複数のリンク型変位計19を接続して設置する。前記リンク型変位計19は、被計測対象の変状に応答して変位可能な筒体21と、該筒体21の内部に該筒体21と同動可能に配置した変位検出部材23と、該変位検出部材23の変位を計測し、その計測デ−タを演算装置45へ出力可能な計測手段34とを備える。前記複数のリンク型変位計19により被計測対象の変状を計測するリンク型変位計の計測管理方法である。前記一のリンク型変位計19に見掛け上の角度出力が発生した際、該リンク型変位計19の両側に配置したリンク型変位計19の見掛け上の角度出力の発生の有無を基に、前記一のリンク型変位計19の不具合ないし故障を検知する。
(もっと読む)
鉄道線路の変位計測方法および鉄道線路変位計測装置
【課題】鉄道線路のレールに現れる変位を監視しその変位量を計測する鉄道線路の変位計測方法・装置に関する。
【解決手段】水路式変位計測装置と周知のレーザ変位計測器を併用し、その水路式変位計測装置を、鉄道線路のレールの変位測定区間に沿わせて配設し、レールの変位計測区間に設定された複数の変位計測点のそれぞれに対して、水路式変位計測装置の変位計測点貯液槽の一つとレーザ変位測定器をそれぞれ対向させると共に、レールの変位計測区間に設定された複数の変位計測点に位置するレール側面にレーザ光を反射させるレーザターゲットを装着し、レーザターゲットに向けて同変位計測点に対向したレーザ変位測定器からレーザ光を照射し、そのレーザ反射光を同レーザ変位計測器で受光して、その反射光の時間差からレールの通り狂い変位を計測すると共に、鉄道線路の基盤をなす地盤の変位をも同時に計測する。
(もっと読む)
位置推定方法、位置推定システム、プログラムおよび記録媒体
【課題】使用する場所を問わず物体の位置を正確に測位する。
【解決手段】物体に装着されたセンシング装置1は、センサ10同士の通信により、他のセンシング装置1が一定距離以下に接近したことを感知する。制御部13は、物体上のセンサ10の位置を示す座標データを記憶する記憶部11から自装置のセンサ10と他のセンシング装置1のセンサ10の座標データを取得し、自装置が装着された物体の原点から見た、他のセンシング装置1が装着された物体の原点の位置を求め、物体の形状データと計算した原点の位置に基づいて、自装置が装着された物体から見た、他のセンシング装置1が装着された物体の相対的な位置と向きを計算する。
(もっと読む)
地震損傷計測システムおよび地震損傷計測方法
【課題】建築物全体の地震計測設備の設置が容易で、地震損傷評価も容易に行える地震損傷計測システムを得る。
【解決手段】本発明の地震損傷計測システムは、建築物の各層間3,10を貫通する昇降路4に設置されて、変位計5とターゲット7により昇降路4内の各層の層間変位を計測する層間変位計測手段と、計測された層間変位の分布により、建築物の健全性を評価する建築物健全性評価手段とを備える。
(もっと読む)
有水式ガスホルダの傾斜測定装置及び有水式ガスホルダの傾斜測定方法
【課題】安価な測定装置を用いて外部の環境によらず安定的にガス槽の傾斜を測定できる有水式ガスホルダの傾斜測定装置を提供すること。
【解決手段】水槽と第1〜第3基柱と昇降自在に設けられたガス槽41を備える有水式ガスホルダの傾斜測定装置10を提供する。この傾斜測定装置10は、ガス槽41に対して同一の相対高さで連結された第1〜第3被検知体と、第1基柱の第1高さに配置され第1被検知体の通過を検知する第1センサ11Aと、第1基柱〜第3基柱の第2高さにそれぞれ配置され、対応する第1被検知体〜第3被検知体の通過を検知する第2〜第4センサ11B〜11Dと、ガス槽が上昇又は下降するときに、第1センサ11Aと第2センサ11Bとの検知タイミングの時間差と、第2〜第4センサ11B〜11Dによる検知タイミングと、に基づいてガス槽41の傾斜を算出する傾斜算出手段13と、を含む。
(もっと読む)
内視鏡挿入形状解析システム
【課題】内視鏡の挿入部により形成されるループ形状を従来に比べて高精度に検出可能な内視鏡挿入形状解析システムを提供する。
【解決手段】本発明の内視鏡挿入形状解析システムは、被検体内に挿入された内視鏡の挿入部における複数の箇所の座標値を取得する挿入状態取得部と、前記複数の箇所の座標値に基づき、前記被検体内に挿入された前記挿入部のうち、少なくとも一部の挿入形状を検出する挿入形状検出部と、前記所定の複数の箇所の座標値及び前記挿入形状に応じて複数の座標平面を設定する座標平面設定部と、前記挿入形状を前記複数の座標平面各々に投影する挿入形状投影部と、前記複数の座標平面各々に投影された前記挿入形状に所定の形状が存在するか否かを判定する挿入形状判定部と、を有することを特徴とする。
(もっと読む)
曲がり形状測定方法および装置
【課題】鋼管などの円筒状長尺材料で、特に局所的な曲がりが小さい材料の、材料全長に亘る空間的に長波長の曲がり形状を高精度で求めるのに適した、曲がり形状測定方法および装置を提供することを目的とする。
【解決手段】材料が距離d/m(mは自然数)だけ搬送される毎の変位測定値を得、これらの測定値と前記材料の軸方向d/m間隔の形状データS1、S2、S3、…を関連付ける方程式を立て、前記材料の局所的な形状変化Si−2Si+1+Si+2(i=1、2、3、…)の前記材料全長に亘る2乗和が最小になるように上記方程式を解く。
(もっと読む)
変形可能な幾何学的形態のプロセスと取得デバイス
【課題】変形可能材料によって規定された幾何学的形態の取得プロセスを提供する。
【解決手段】変形可能な幾何学的形態のプロセスおよび取得デバイス。センサ(1)のセットがこの形態(曲面または表面)上に置かれる。その状況で、それぞれのセンサがこのセンサの位置でのその形態の方向を表現する信号を供給し;その形態のモデルが選択され;その信号に基づいて、モデルのパラメータが決定され、センサを隔てる距離が測定され;そしてモデルと距離測定とのパラメータに基づいて、その形態の点の空間的配置が決定される。本発明は特に、機械加工、建具、石積み加工、および構造加工の分野に適用される。
(もっと読む)
ユーザの姿勢をモニタするための装置
【課題】
ユーザの姿勢をモニタ及び追跡し、ユーザの姿勢における欠陥を矯正するためにフィードバックを行う装置を提供する。
【解決手段】
本発明の装置はユーザによる着用が可能な装置であって、各々がユーザの身体の少なくとも一部分の位置に関する指標を提供するための複数のセンサ素子と、合成位置信号を提供するために、その複数のセンサ素子の各々によって提供される位置に関する各指標を受信するための受信機とを含む。個々のセンサの読取り結果が、すべて、更なる分析のために外部エンティティに送られる。センサは、ユーザの身体の少なくとも一部分の曲りを測定するために種々のロケーション又は位置に設置される。
(もっと読む)
1 - 20 / 33
[ Back to top ]