
Fターム[2F069HH13]の内容
測定手段を特定しない測長装置 (16,435) | 測定器機 (1,161) | エンコーダー (296) | インクリメンタル (21)
Fターム[2F069HH13]に分類される特許
1 - 20 / 21
産業機械および産業機械の制御方法
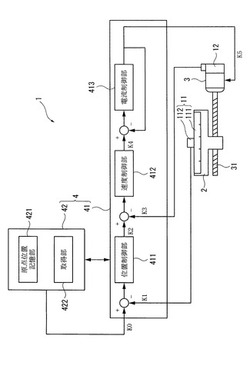
【課題】 短時間で容易かつ確実に原点位置の検出ができる産業機械および産業機械の制御方法を提供する。
【解決手段】 三次元測定機1は、所定の軸方向へ制御対象物を移動させるスピンドル2と、スピンドル2を移動させる駆動力を発生する駆動モータ3と、スピンドル2の位置を制御するとともに駆動モータ3の回転速度を制御する制御装置4とを備えるものであって、スピンドル2の位置に基づく信号を検出するインクリメンタル型のリニアエンコーダ11と、駆動モータ3の絶対角度に基づく信号を検出するアブソリュート型のロータリーエンコーダ12とを備える。
(もっと読む)
回転位置検出装置およびレーザ加工機

【課題】ドグの有無を検知するためのセンサからの信号のみを用いることで、360°以上の回転ストロークを有する回転軸の回転位置を検出すること。
【解決手段】原点センサ16cにてドグ20cが検知されるとともに、OT+センサ16aおよびOT−センサ16bにてドグ20a、20bがそれぞれ検知されない時に加工ヘッド13が原点位置にあると判別し、原点センサ16cにてドグ20cが検知されるとともに、OT−センサ16bにてドグ20bが検知されることなく、OT+センサ16aにてドグ20aが検知された時に加工ヘッド13が+360°だけ回転したと判別し、原点センサ16cにてドグ20cが検知されるとともに、OT+センサ16aにてドグ20aが検知されることなく、OT−センサ16bにてドグ20bが検知された時に加工ヘッド13が−360°だけ回転したと判別する。
(もっと読む)
回転角検出装置
【課題】比較的簡単な構成で、高精度な回転角の検出を実現する。
【解決手段】 本発明の回転角検出装置20は、回転体4L,4Rの回転に応じて、1回転より大きく、且つ2回転未満の範囲で回転する回転手段23と、回転手段に備えられ、回転手段の回転に応じて回転手段の回転角を示す信号パルスを発生する信号発生手段21,22と、信号パルスに基づき回転手段の回転角を検出する検出手段21,22と、回転手段の回転角に基づき回転体の回転角を演算する演算手段10とを備える。
(もっと読む)
角度測定装置
【課題】物体の角度を測定する際の基準位置を容易に設定する。
【解決手段】十字線が示されるレチクル26を保持し、ドーナツ型のスケール円板25が上面の端部に固定されている回転筒24が、レンズ23の光軸A回りに回転可能となるようにケース21の内部に設置されている。基準ピン29は、回転筒24の基準穴24Aに適合し、回転筒24を基準位置に設定したときに、基準穴24Aに挿入することが可能である。エンコーダセンサヘッド27は、スケール円板25の回転量および回転角を検出し、カウンタ表示部34は、検出された回転量および回転方向に基づいて、表示値がリセットされたときのスケール円板25の回転方向の位置を基準にして、スケール円板25の回転角を表示する。本発明は、例えば、顕微鏡用のデジタルプロトラクタに適用できる。
(もっと読む)
位置決め装置
【課題】特定のエリアでは高い位置決め精度を確保しつつ、全体として比較的安価な位置決め装置を提供する。
【解決手段】 位置制御されるスライダ1と、このスライダ1と対向する面に磁極の歯が形成されてスライダ1と平面モータを構成するプラテン10とを備えた位置決め装置において、
スライダ1の位置を検出するレゾルバ30a〜30c(以下レゾルバ30とする。)と、
プラテン10の特定のエリアAにおけるスライダ1の位置をレゾルバ30よりも高い精度で検出するレーザ干渉計20a,20b(以下レーザ干渉計20とする。)と、
スライダ1の位置に応じてレゾルバ30またはレーザ干渉計20のいずれかの位置検出装置を選択する切替スイッチ100cと、
位置指令値および切替スイッチ100cで選択された位置検出装置で検出される位置検出値に基づいてスライダ1の位置制御を実行する位置制御部102と、
を備えたことを特徴とする位置決め装置。
(もっと読む)
逐次読み取り式絶対位置センサ
本発明は、少なくとも一つの検出器(3)を備える逐次読み取りを行う絶対位置センサ(10)に関し、前記検出器(3)は、当該検出器に対して可動な部材(1)上に設けられたターゲットパターン(2)の遷移を検出することができる。本センサは、前記検出器(3)から生じる所定の数の連続データを記憶可能なシフトレジスタと、前記レジスタの値(5)を、各々がターゲットパターン(2)に対する検出器(3)の位置に対応する所定の値のセット(6)と比較する手段とを備えていることを特徴とする。  (もっと読む)
(もっと読む)
テーブル位置決め装置
【課題】高精度位置決めを迅速かつ安定して行なえるようにする。
【解決手段】 ボールねじ軸(リード1mm)を利用した全域回転駆動型でかつテーブルを最小1nmずつ移動可能で、3つの光学格子(明・暗線が2μm)を用い信号分割数を2000として1nm/1パルスの移動変位量検出信号を生成でき、オープンループ制御による高速回転とクローズドループ制御による中速回転および低速回転をこの順序で切換えて位置決めでき、低速回転中にインポジション範囲内であることを確認して迅速停止可能に形成されている。
(もっと読む)
伝達比可変機構用センサシステム及びこれを用いた操舵装置
【課題】起動時よりハンドルの操舵絶対角と、伝達比可変機構の副回転絶対角と、転舵輪の操向絶対角を簡単な構成で検出する伝達比可変機構用センサシステムを得る。
【解決手段】操舵ハンドル3と一体的に回転する第1のステアリングシャフト2の第1の所定角度毎に、第1の所定角度範囲内における絶対角を第1の絶対角センサ603により繰り返し検出し、副回転角が固定された状態で、操向車輪5を転舵する部材と一体的に回転する第2のステアリングシャフト4の第2の所定角度毎に、第2の所定角度範囲内における絶対角を第2の絶対角センサ703により繰り返し検出し、さらに副回転角の多回転成分を含む絶対角を副回転絶対角検出手段9により検出して、センサシステム起動時から、第1のステアリングシャフト2と第2のステアリングシャフト4の多回転分を含む絶対角を、3つのセンサで検出する。
(もっと読む)
車両用制御装置
【課題】ステアリングホイールとステアリングギヤを機械的に分離させた構成において、操舵角度を検出するセンサのリセットを確実に行えるようにする。
【解決手段】第1のエンコーダ13は、ステアリングホイール2の回転に応じてパルス信号を出力し、アップダウンカウンタ24でパルス数を計数して操舵角度を検出する。アップダウンカウンタ24のカウント値は、ステアリングホイール2が中立点に移動したときにリセットされる。この際に使用されるリセット信号Rwは、中立点検出センサ14が出力する中立点位置信号Cwを使って発振回路27のパルス信号を選択する。発振回路27のパルス信号は、第1のエンコーダ13が出力する回転検出信号Aw,Bwのパルス幅に対して十分に狭い信号である。
(もっと読む)
非接触式三次元形状計測方法及び計測機
【課題】接触式三次元形状計測機の3軸移動機構等を非接触式として利用できることに着眼して、非接触式位置センサを代わりに取付けて転用による非接触式三次元形状計測方法を提供する。
【解決手段】接触式三次元形状計測機の本来接触式プローブが取付けられるべきヘッド6の原点位置に対する非接触式位置センサ29の原点位置の原点較正データを予め作成しておき、駆動手段7x,7y,7zを駆動制御するように3軸移動機構8の移動範囲の移動始端位置及び移動終端位置を逐次指令し、ヘッド6の移動走査過程において非接触式位置センサ29に対して所定の繰返し周期でトリガー指令を行い、移動始端位置及び移動終端位置並びに繰返し周期ごとの移動位置で規定されるヘッド6の原点位置を原点較正データに対応して較正して非接触式位置センサ8の原点位置を求めて、この原点位置における非接触式位置センサ8の非接触検知位置データにより計測対象物である車両ボデー9の三次元形状データを作成する。
(もっと読む)
間口の寸法測定装置
【課題】 探触子の接地の際、手ぶれにより測定誤差が発生せず、また敷居/鴨居/柱に養生材が貼り付けられたままで、間口の実寸法を測定する装置を提供すること。
【解決手段】 雲台を有する三脚と、雲台に取り付けられる寸法測定装置本体と、寸法測定装置本体にワイヤーで結合される探触子とを具備し、上記寸法測定装置本体は、雲台に取り付けられる基台と、基台の水平方向に植設された固定軸に回動自在に設けられた回転台と、基台に対する回転台の回動角度を検出するロータリ・エンコーダと、基台から測定点まで長さを検出するリニア・エンコーダと、検出した角度および長さのデータを格納する記憶手段とを具備し、また、探触子は、自在に回動するリンクに結合された先端部と、先端部に対して左右に回動するクランクと、ワイヤーとともに回動する受光手段とを具備するものである。
(もっと読む)
回転検出装置
【課題】 駆動軸と回転体との係合を強化して、駆動軸と回転体との間に回転ずれが発生することなく常に一体的に回転することができるようにして検出精度を高めた回転検出装置を提供することを目的する。
【解決手段】 回転体12に規制部12dを形成し、規制部12dの形成位置とは反対側に弾性部材20の弾接部20gを配設して、駆動軸11の平坦面11cのうち中心線A−Aよりも図示Y2側に位置する平坦面11cと規制部12dとを、弾接部20gによって互いに弾圧させる。このようにすると、駆動軸11と回転体12とを一体化することができ、駆動軸11の回転が急停止させられた場合も、駆動軸11と回転体12との間に回転ずれが生じることを防止できる。その結果、回転検出装置10の出力変動を所定の規格範囲内に収めることができ、回転検出装置10の検出精度を高めることができる。
(もっと読む)
回転角度検出装置
【課題】主に自動車のステアリングの回転角度検出等に用いられる回転角度検出装置に関し、簡易な構成で、正確な回転角度の検出が可能なものを提供することを目的とする。
【解決手段】第一及び第二の検出体2、4と補助検出体21の各回転速度を異なるものとし、第一及び第二の検出手段8、10、第二の検出手段10と補助検出手段25、第一の検出手段8と補助検出手段25からの各検出信号により、制御手段26が回転体1の仮の角度を各々演算し、これらの演算値θ1、θ2、θ3が所定範囲内であった時に、演算値θ1を回転体1の回転角度θとして検出することによって、各検出体や検出手段の異常の検出が可能となり、簡易な構成で、正確な回転角度の検出が可能な回転角度検出装置を得ることができる。
(もっと読む)
スピンドルの制動装置および測定器
【課題】スピンドルの操作性および耐久性を向上させることのできるスピンドルの制動装置および測定器を提供すること。
【解決手段】制動装置600は、スピンドル300が移動するシリンダ610と、このシリンダ610内を2つに区画するピストン620と、スピンドル300とピストン620とを、軸方向および軸直交方向に対し一定のクリアランス633を介して連結する連動手段660と備え、連動手段660は、ピストン620に形成された中空室623と、スピンドル300の他端に設けられ、他端側が中空室623内に係合収納される係合部630とを含み構成され、スピンドル300が一端側へ移動する際には、係合部630が中空室623の一端側内壁に当接し、かつ、他端側へ移動する際には、係合部630が中空室623の他端側内壁に当接するように形成されている。
(もっと読む)
探傷装置
【課題】 プローブの操作性がよいこと、形状変化のある被検体にも対応できること、スキャナの取り付け時間を要しないことなどを実現することができる探傷装置を提供する。
【解決手段】 プローブ位置情報を採取する手段を、例えば、プローブ21に結合され、ボール31の回転をローラ32,33を介してエンコーダ34,35に伝えるボール式のものであってプローブが被検体(配管28)の表面上を移動するときにプローブとともに移動してボールが被検体の表面上を転動することによりエンコーダがボールの回転検出信号を出力する構成のマウススキャナ22と、エンコーダの回転検出信号に基づいて被検体の表面上のプローブの位置を求めるエンコーダ出力装置24とを有する構成とする。この場合、マウススキャナに設けたジャイロ41の回転角検出信号に基づいてプローブの位置をマウススキャナの座標軸上の値から被検体の座標軸上の値に変換することが望ましい。
(もっと読む)
マーク位置特定方法及び装置、並びにバランス修正方法及び装置
【課題】 回転体の外周面の傷や汚れにセンサが反応してもマークの位置を正しく特定するマーク位置特定方法及び装置を提供する。
【解決手段】 回転体の外周面に等間隔で配置されているマークの位置を特定するマーク位置特定方法であって、少なくともマークに反応するセンサで回転体の外周面をセンシングし、回転体の一回転中にセンサが反応した反応位置を記憶する(S105〜110)。次に、反応位置がマークの位置であると仮定した場合に理論的に特定される他のマークの位置について、それぞれ直近の反応位置との角度差を求め、求めた角度差を合計する。これを各反応位置について行う(S115〜S130)。次に各反応位置のうち、合計値が最も小さい反応位置をマークの位置として特定する(S135)。
(もっと読む)
エンジンの燃焼装置制御システム
【課題】不検出区間を縮めることによって、ピストンの位置を精度よく検出して、検出結果に基づきエンジンの燃焼装置に最適の混合気噴射タイミングと点火タイミング情報を提供する。
【解決手段】フライホイール10が回転中に、検出センサがフライホイール10の内側面上に形成されたインデックス20aを検出することによってエンジン回転数及びピストンの位置を正確に測定することができる。このようなインデックス20aはフライホイール10と中心を同じくする円周上に実質的に均一に形成されると同時に、所定の間隔に区分させることによってエンジン回転数の測定と同時にピストンが上死点に到達する位置を正確に予測できるようになる。これにより、別の回転板なしにフライホイール10上にエンジンの燃焼装置制御システムを実現することができ、エンジンのECUがさらに正確に混合気の噴射タイミングと点火タイミングを制御できるようにする。
(もっと読む)
レンズ形状測定装置
【課題】
レンズ形状の測定中にスタイラスがレンズから外れて落下することを防止する。
【解決手段】
基台11の基板11a上には、レンズ保持ユニット12およびトレーサ機構部13が設けられている。レンズ保持ユニット12全体は、基板11a上に固定されており、このレンズ保持ユニット12には、加工済みのレンズ14が保持されている。スタイラス台20上のスタイラスユニット30には、スタイラス31が取り付けられている。スタイラス31は、水平方向、すなわちZ軸方向を向いている。スタイラスユニット30は、Z軸方向およびY軸方向に移動し、これによりスタイラス31がレンズ14の周縁に接触し、トレースが実行される。
(もっと読む)
鋼板の伸び率計測装置および伸び率計測方法
【課題】 圧延機やレベラー等によって鋼板に所定の伸び率を付与する場合において、実際の伸び率を正確に測定する装置を提供する。
【解決手段】 圧延機2等により実際に付与した伸び率を測定する際に、伸び率補正値演算手段9にて、ロール径測定誤差や、ロール自体の磨耗、熱膨張等に起因した伸び率測定誤差εerrを演算し、伸び率演算手段10にて従来と同様の方法によって測定される測定誤差を含んだ伸び率ε′に加算することで、誤差を補正する。
(もっと読む)
スライド操作装置
【課題】ミキシングコンソールのフェーダなどのスライドボリューム装置において、スライド操作子への加圧力に対して、磁気式センサ23での検出精度を確保する。
【解決手段】移動ブロック2を、互いに平行な主移動ガイド体11と副移動ガイド体12で摺動自在に保持する。主移動ガイド体11を棒状のステンレスシャフトとする。副移動ガイド12を非磁性ステンレスのシャフト12aと磁性部材12bでインサート成型する。磁気式センサ23で磁性部材12bの磁極パターンを検出する。移動ブロック2の副ガイド孔22の上下方向のクリアランスを主ガイド孔21の上下方向のクリアランスより大きくする。主移動ガイド体11でスライド方向にガイドし、副移動ガイド体12で移動ブロック2の横揺れを防止する。
(もっと読む)
1 - 20 / 21
[ Back to top ]