
Fターム[2F069JJ14]の内容
測定手段を特定しない測長装置 (16,435) | 走査 (1,064) | 物体による走査 (373) | 並進 (163) | 2次元 (40)
Fターム[2F069JJ14]に分類される特許
1 - 20 / 40
校正用冶具、校正方法、及び該校正用冶具が搭載可能な形状測定装置
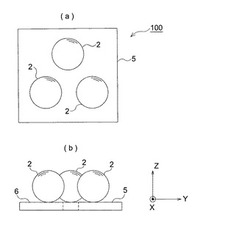
【課題】レンズの偏心を測定できる形状測定装置を簡易的に、かつ高精度に校正できる校正用冶具、校正方法、及び該校正用冶具が搭載可能な形状測定装置を提供する。
【解決手段】校正用冶具100は、中心が円周上を3等分し、計測用基準球を接するように設置できる3個の基準球2を備える。形状測定装置は、該校正用冶具を配置可能であり、被測定物の形状に関する情報を取得するための第1プローブと、校正用冶具に対して第1プローブと反対側に設けられ被測定物の形状に関する情報を取得するための第2プローブと、第1プローブ及び第2プローブにより、配置された計測用基準球を測定して第1測定結果及び第2測定結果を求める測定部と、第1測定結果及び第2測定結果を比較してシフトを算出するシフト量算出部と、を備える。校正方法は、上記形状測定装置を用いた測定ステップとシフト量等を算出するシフト量算出ステップとを備える。
(もっと読む)
三次元形状測定方法

【課題】被測定物の三次元形状の測定精度をより一層向上させることができる三次元測定方法を提供する。
【解決手段】被測定物の表面に沿ってプローブを走査して、XY座標データを取得するとともに、光干渉計によりXY座標データに対応するA相正弦波信号値とB相正弦波信号値とを取得し、それらの信号値の位相差と2乗和平方根とを算出し、位相差に基づいてZ座標データを取得するとともに、2乗和平方根によりプローブのZ軸方向に対する傾き角度を求め、当該傾き角度からプローブと被測定物との接点の位置ズレ量を算出し、XY座標データとZ座標データと位置ズレ量とを合成して、X軸、Y軸、及びZ軸における各座標データを取得し、被測定物の三次元形状を測定する。
(もっと読む)
測定装置
【課題】測定対象物の測定位置を測定センサに対して正確かつ簡単に位置決めすることができる測定装置を提供する。
【解決手段】測定装置1は、焼結部品2の寸法を測定する測定センサ3,3と、測定センサ3,3が取り付けられた固定部10と、焼結部品2を保持する治具20とを有する。固定部10には、治具20を測定ポイントへ案内するためのガイド溝13を二次元平面上に形成すると共に、焼結部品2の測定位置A〜P,A〜Pを測定ポイントに一致させるように治具20を固定部10に対して位置合わせする位置決め溝14を、ガイド溝13の溝幅及び溝深さより大きくガイド溝13上に形成する。そして、ガイド溝13の溝幅より大きく、位置決め溝14より小さいボール26を、固定部10側へ付勢する圧縮ばね25を、治具20に設ける。
(もっと読む)
測定装置
【課題】長尺の断面直線形状や面形状の測定における水準器と多点法の利点だけを有効に使い、大面積の被測定面を迅速に高精度に測定できる測定装置を提供する。
【解決手段】被測定試料の置かれたステージと多点法プローブを保持するセンサホルダが互いに相対的に移動をして直線形状を走査測定する装置において、移動する側のセンサホルダまたはステージの走査方向の傾斜角を測定することの出来る水準器を備えていて、前記水準器によって走査移動の開始点と終了点での前記移動側物体の傾斜を測定することで、多点法プローブのゼロ点調整誤差をその場校正する。
(もっと読む)
保管装置及び同保管装置を備えた計測装置
【課題】オイルミストや塵などの付着から不使用時にある検出手段を保護して測定精度の悪化を防止する保管装置を提供すること。
【解決手段】被検物Mの形状情報を採取するための検出手段(非接触センサ20a、タッチプローブ20b)をその不使用時に保管する保管装置であって、前記不使用時の検出手段をその周囲の雰囲気から隔てる保護手段(プローブボックス30,エアーポンプ40)を備える。
(もっと読む)
小動物の位置測定システム
【課題】1Kg程度の飼育ケース内に存在する10〜30g程度と軽量な小動物の位置情報を、安価に収集するシステムを提供する
【解決手段】重心の変化を求める荷重計とは別に、重量を支える支柱2を用意することにより、広いダイナミックレンジの荷重計を用いる必要が無くなり、システムを低コストで提供することが可能となる。安価なシステムを提供できれば、これまで容易に評価できなかった開発機関でも導入がすすみ、より多くの研究者が積極的に研究できる体制を整備することが可能となる。また、医薬品や機能性食品等の研究開発における学術レベルの向上に貢献できる。
(もっと読む)
形状測定装置及び形状測定方法
【課題】所定の基準面と直角の方向における位置を測定する形状測定において、従来よりも簡易な構成によって、基準面に対して大きな傾斜角をなしかつ任意の方向を向いた測定面における測定を可能とする。
【解決手段】形状測定装置1を、少なくとも2軸方向(X、Y)に試料Wとプローブ20とを相対運動させて試料Wの表面をプローブ20で走査させる多次元移動手段(11、30)と、試料Wを置くための、2軸方向(X、Y)に対して直角な軸Zに対して傾斜した傾斜面を有する試料台12と、傾斜面の垂直軸Aを回転軸として試料台12を回転させる回転手段とを備えて構成する。
(もっと読む)
3次元離散データのリサンプル方法、及び装置
【課題】センサのサンプリング・ポイント付近の物理量データの微細な変化の推定を容易に行う。
【解決手段】(x,y)=(X,Y)であるポイントを中心として、その周りを取り囲む、9個のサンプリング・ポイント中の6個のポイントを選択して、(X,Y)ポイントと当該6個のポイントから得られる6個の三角形中の任意のポイントのZ軸上の値を推定するための方法であって、
当該方法が、前記9個のポイントの最外周によって画定される矩形上の、ほぼ対角線上の2ポイントを選択し、当該2ポイントを除外した、6ポイントで前記6個の三角形を構成するものである方法。
(もっと読む)
長尺体の表面形状測定方法および表面形状測定装置
【課題】オートコリメータでは高精度測定ができない長さが1m以上の長尺状物の表面形状(真直度)を複数の変位センサを用いて測定する。
【解決手段】3本の変位センサA,B,Cをピッチ間隔p毎に直列にアーム311に固定し、テーブル上に固定された被測定物の真直度を、オートコリメータが高精度に測定できる作動範囲ではオートコリメータにより測定される値を用いて2本の変位センサA,Bにより2点法で検出された真直度値のピッチングの補正を行って初期真直度値データ列を得、オートコリメータが高精度に測定できない作動範囲における真直度の測定においては第三の変位センサCより検出される真直度値で測定基準を作り、この測定基準の測定点の値を基準にして変位センサA,Bによる2点法の出力からピッチングを検出し、それを使用してピッチング補正しながら次々に繰り返して測定範囲を広げて延長真直度値データ列を得、真直度曲線を出力する。
(もっと読む)
表面形状測定システムおよび測定方法
【課題】走査型プローブ顕微鏡測定の障害となる半導体ウエハ内部に蓄積された電荷を、確実に取り除き、走査型プローブ顕微鏡の探針の破壊を防止し、安定した表面形状測定を行うことができる測定システムおよび測定方法を提供すること。
【解決手段】第1プローブ136と、被測定物SPを第1プローブ136に対して進退および走査可能に相対的に移動させる第1試料位置制御手段120と第1プローブ136および被測定物SPの表面を観察可能な光学顕微鏡部150とを有する走査型プローブ顕微鏡部100と、導電性の第2プローブ232と、被測定物SPの特定部位を第2プローブ232に対して進退および走査可能に相対的に移動させる第2試料位置制御手段220と第2プローブ232および被測定物SPの表面を観察可能な光学顕微鏡部150とを有する除電部200と、を備える。
(もっと読む)
微細形状測定装置
【課題】本発明の目的は高精度な形状測定を行う微細形状測定装置を提供することにある。
【解決手段】固定端14bに保持された状態でワーク40をなぞるスタイラス34を自由端14aに持つ可撓性カンチレバー14と、該固定端14bを上下動する駆動手段20と、該ワーク40に対する位置及び姿勢が変化しない基準部材22と、該基準部材22とスタイラス34との上下方向の相対変位を測定し、自由端変位情報を出力する自由端変位計24と、該基準部材22と固定端14bとの上下方向の相対変位を測定し、固定端変位情報を出力する固定端変位計26と、該自由端変位情報及び固定端変位情報に基づきカンチレバー14の上下方向のたわみ量を求める演算手段28とを備え、該たわみ量が所定値となるように該固定端14bを上下させつつ該ワーク40を走査して得られた、該自由端変位情報に基づき、該ワーク40の形状を把握することを特徴とする微細形状測定装置10。
(もっと読む)
測定装置
【課題】本発明の目的は高精度な測定を行うことのできる測定装置を提供することにある。
【解決手段】測定時において、ワーク20に対して位置及び姿勢が変化しないように保持された基準部材12と、該ワーク20表面を走査しながら、該ワーク20表面の凹凸に応じて上下方向に変位するスタイラス14と、該スタイラス14の特定部位36の変位を該基準部材12との比較において測定する変位計16と、該スタイラス14を該ワーク20表面に沿って走査させる走査手段18と、を備え、該基準部材12は該走査によっても該ワーク20に対する位置及び姿勢が変化せず、該スタイラス14の特定部位36の上下方向への変位を該基準部材12を基準にして測定し、該測定されたスタイラス14の特定部位36の変位に基づき該ワーク20の微細な形状を把握することを特徴とする測定装置10。
(もっと読む)
少なくとも一つのスライド方向に沿って移動可能な物体の位置を計測するための装置
本発明は、少なくとも一つのスライド方向に沿って移動可能な物体の位置を計測するための装置に関し、各スライド方向に対応して、当該の空間方向に沿った物体の位置を測定するための測長器が配備されており、当該の測長器(2,3)の第一の構成部品として、測定すべき物体(10)のスライド方向(x,y)に沿って延びる少なくとも一つの基準尺(20,30)が配備され、当該の測長器(2,3)の第二の構成要素として、基準尺(20,30)を走査するための走査ヘッド(25,35)が配備されており、その結果測定すべき物体(10)の当該のスライド方向(x,y)に沿った走査ヘッド(25,35)に対する基準尺(20,30)の位置の変化を検出することが可能であり、当該の測長器(2,3)の二つの構成要素(20,25;30,35)の中の一方が、測定すべき物体(10)が動いた場合に、その物体と一緒に当該のスライド方向(x,y)に沿って動かされ、当該の測長器(2,3)の測定方向(x,y)に沿った測定すべき物体(10)と一緒に移動可能な当該の測長器(2,3)の構成部品(20,30)と測定すべき物体(10)との距離を計測するための機器(12,23;13,33)が配備されている。本発明では、測定すべき物体(10)と一緒に移動可能な当該の測長器(2,3)の構成部品(20,30)と測定すべき物体(10)との距離を計測するための機器(12,23;13,33)が、第一の構造グループとしての測定目盛(12,13)と、それに対応する第二の構造グループとしての測定ヘッド(23,33)とを備えており、二つの構造グループ(12,23;13,33)の中の一方が、測定すべき物体(10)に配備されており、二つの構造グループ(12,23;13,33)の中の他方が、測定すべき物体(10)と一緒に移動可能な測長器(2,3)の構成部品(20,30)に配備されている。 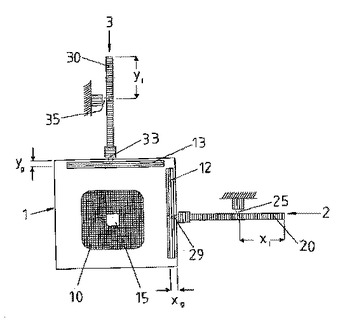 (もっと読む)
(もっと読む)
形態測定装置および形態測定方法
【課題】薄板を傷付けることなく且つ反りを生じることなくセットステージに載置することができると共に、セットステージへの固定および固定解除を瞬時に行うことができる形態測定装置を提供することを課題とする。
【解決手段】帯電性を有する薄板W上に形成された薄膜の形態および帯電性を有する薄板の表面の形態のいずれかを、非接触で測定する形態測定装置1において、薄板Wをセットするセットステージ4と、セットステージ4にセットした薄板Wに非接触で臨み、薄膜の形態または薄板の表面の形態を測定する測定器6と、を備え、セットステージ4には、薄板Wを静電吸着する静電吸着機構5が組み込まれている。
(もっと読む)
形状測定装置
【課題】 表面形状の計測を高精度化することができ、触針を簡易に支持することによって小型の形状測定装置を提供すること。
【解決手段】 XYステージ装置82に設けたX駆動装置50がエアスライドによって可動部52を非接触で支持しリニアモータ51a,51bによって可動部52を駆動するので、載置台82aのXY軸方向に関する運動が滑らかで高精度になる。よって、光学素子OEをXY面内で移動させる際にZ軸方向の微小変位が生じにくくなり、触針11の変位量計測を正確にすることができ、光学素子OEの表面形状の計測精度を向上させることができる。
(もっと読む)
顕微鏡システム、観察方法および観察プログラム
【課題】対象物の所望の位置を容易かつ迅速に観察することができる顕微鏡システム、顕微鏡システムを用いた観察方法および観察プログラムを提供する。
【解決手段】顕微鏡システムにおいて、使用者は、原子間力顕微鏡の試料載置台上に試料を載置し(ステップS1)、光学顕微鏡による試料の観察を行う(ステップS2)。使用者は、光学顕微鏡による試料の観察時に光学顕微鏡の倍率の調整を行う(ステップS2a)。また、使用者は、光学顕微鏡による試料の観察時に原子間力顕微鏡による試料の観察対象領域の探索も行う(ステップS2b)。続いて、使用者は、ステップS2bにおいて探索した観察対象領域の中から、さらに原子間力顕微鏡による試料の観察対象領域を指定する(ステップS3)。その後、使用者は、ステップS3において指定した観察対象領域について原子間力顕微鏡による試料の観察を行う(ステップS4)。
(もっと読む)
形状測定装置、形状測定方法
【課題】様々な厚みの測定試料の表面形状を測定する場合でも、事前の校正作業工数の増大を伴うことなく、高い測定精度を確保して測定できること。
【解決手段】変位計2で測定位置を2次元方向に走査させつつ得られる計測値から測定ウェハ4の表面形状を測定する場合に、測定ウェハ4と厚みが異なるが材料及び平面視した形状が同じ基準ウェハの厚み、及びそれが支持部1で支持された場合の自重による撓み量、並びに走査手段3の走査ぶれ量を予め記憶し、対向配置した変位計2a,2bによる測定ウェハ4の厚み計測、変位計2による測定ウェハ4の表面変位計測を行い、計算機7により、予め記憶された基準ウェハの厚み及び自重撓み量と測定ウェハの厚み計測値とにより、測定ウェハ4の自重撓み量を算出し、走査ぶれ量と測定ウェハ4の自重撓み量及び表面変位計測値とにより測定ウェハ4の表面形状値を算出する。
(もっと読む)
走査型プローブ顕微鏡及びその動作方法
【課題】 本発明は走査型プローブ顕微鏡及びその動作方法に関し、探針と試料とが接触することを確実に回避することを目的としている。
【解決手段】 探針を試料表面に対して相対的に走査し、これにより試料表面の凹凸を測定する走査型プローブ顕微鏡において、それまでに走査した走査ラインにおける試料表面の高さ情報の最高値に対応して高さ方向の走査基準位置を更新するとともに、走査基準位置に対する高さ方向での探針の相対移動の制限値を設定し、当該更新後に次の走査ラインの走査を順次実行する。
(もっと読む)
検出方法、制御方法及び位置合わせ方法
【課題】高精度かつ短時間にウエハの面上の異常を検出する。
【解決手段】パラメータmultiに1がセットされていた場合、所定枚数のウエハWの同一箇所での面位置の計測値の絶対値|Ht(xi,yi)|が閾値以上となると、ウエハWとウエハホルダWHとの間に異物が挟まれていると判断して面異常フラグf[i]をセットし(ステップ404→406→408→410→412)、パラメータmultiに0がセットされていた場合には、ウエハWのある地点(xi,yi)での面位置の計測値の絶対値|Ht(xi,yi)|が閾値以上となると、ウエハWとウエハホルダWHとの間に異物が挟まれていると判断して面異常フラグf[i]をセットする(ステップ404→406→412)。
(もっと読む)
走査型プローブ顕微鏡
【課題】走査範囲を大きくでき、しかも高精度に試料の観察を行うことができる走査型プロ−ブ顕微鏡を提供する。
【解決手段】探針1と、探針1の位置を検出する位置検出器2と、探針1を試料Sに対して直交する方向に変位させる変位機構3と、変位機構3をZ軸に対して直交するX軸方向に移動させる走査機構4と、変位機構3をZ軸及びX軸に対して相互に直交するY軸方向に移動させる走査機構5とを備えた走査型プローブ顕微鏡である。変位機構3をZ軸方向に伸縮する圧電素子10にて構成する。走査機構4を、Y軸方向に伸縮する圧電素子11と、圧電素子11の伸縮をX軸方向の伸縮に拡大変換するリンク機構12にて構成する。走査機構5を、X軸方向に伸縮する圧電素子13と、圧電素子13の伸縮をY軸方向の伸縮に拡大変換するリンク機構14にて構成する。
(もっと読む)
1 - 20 / 40
[ Back to top ]