
Fターム[2F069NN06]の内容
測定手段を特定しない測長装置 (16,435) | 信号処理 (1,324) | 積分するもの (73)
Fターム[2F069NN06]に分類される特許
1 - 20 / 73
姿勢検出装置および姿勢検出方法
電子機器
状態検出装置、電子機器及びプログラム
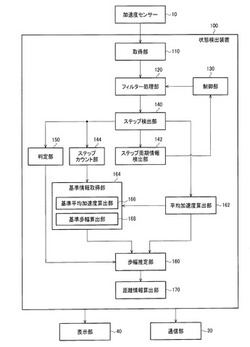
【課題】 平均加速度、基準平均加速度及び基準歩幅に基づく処理を行うことで、歩幅の推定精度を高める状態検出装置、電子機器及びプログラム等を提供すること。
【解決手段】 状態検出装置100は、加速度センサー10からの加速度検出値を取得する取得部110と、加速度検出値に基づいて、所与の期間ごとの平均加速度を算出する平均加速度算出部162と、基準平均加速度と基準歩幅を取得する基準情報取得部164と、基準平均加速度に対する平均加速度の比、前記基準歩幅に基づいて、歩幅を推定する歩幅推定部160を含む。
(もっと読む)
位置計測装置及び位置計測システム

【課題】本発明は、機動性に優れ、平坦でない計測基準面でも、高い精度で位置データを素早く計測できる位置計測装置を提供する
【解決手段】演算装置200は、カメラ速度と最大荷重領域の速度とを対応付けた対応テーブルを記憶する記憶部230と、足裏圧力が最大となる最大荷重領域の時間変化により最大荷重ベクトルを生成する最大荷重ベクトル生成部251と、対応テーブルを参照して、最大荷重ベクトルが示す最大荷重領域の速度から、カメラ速度を算出するカメラ速度算出部252と、最大荷重ベクトルが示す最大荷重領域の方向を、カメラ方向として算出するカメラ方向算出部253と、カメラ速度と、カメラ方向とに基づいて、カメラ位置を算出するカメラ位置算出部254と、を備える。
(もっと読む)
タイヤ摩耗予測方法及びタイヤ摩耗予測装置
【課題】航空機に用いられるタイヤの摩耗量を高精度に予測することが可能なタイヤ摩耗予測方法及びタイヤ摩耗予測装置を提供する。
【解決手段】 タイヤ摩耗予測方法は、航空機に用いられるタイヤの摩耗量を予測する。タイヤ摩耗予測方法は、使用条件に応じて区分けされた複数の走行状態の各々に対応する複数の摩耗エネルギーEnを取得するステップAと、前記複数の摩耗エネルギーEnと、前記複数の走行状態の各々の使用頻度とを前記複数の走行状態別に乗算するとともに、乗算結果を積算してタイヤに蓄積される全摩耗エネルギーEAを算出するステップBと、前記全摩耗エネルギーEAに基づいて、前記航空機用タイヤの摩耗量を算出するステップCとを含む。
(もっと読む)
センサベースのオリエンテーションシステム
【課題】リニア加速度計を使用して、3つの軸のうちの任意あるいはすべてに関する回転を含むオブジェクトの位置の変化を測定するオリエンテーションシステムを提供する。
【解決手段】6次元の情報、すなわち、3つの次元における平行移動と3つの軸に関する回転について測定し、供給するために、2つの3Dのリニア加速度計20、20’を積分する1つのリニア加速度計23を使用する方法が開示される。2つのリニア加速度計センサは、6自由度における変数のうちの1つ以外のすべてを決定するように使用される。第3の加速度計からの出力は、回転6自由度を決定するために必要なデータを生成する。ヘディングにおける変化(すなわち、ヨーあるいは方位)を検出するためのジャイロスコープの必要性は、それゆえに避けられることができる。
(もっと読む)
移動体長計測装置及びそれを用いた列車運行管理システム
【課題】移動体側方に設置した物体検知センサを用いて停止時にも移動体長の範囲が検出可能な移動体長計測装置及びそれを利用した列車運行管理システムを提供する。
【解決手段】移動体長計測装置は少なくとも3箇所以上の物体検知センサを有し、そのセンサ位置間距離は大小二つの距離となるよう配置し、移動体長の最小及び最大長を推定し、センサ設置位置間距離は、大きい方の距離が最大想定移動体長より大きいかまたは小さい方の距離が最小想定移動体長以下となるように配置し、センサ検出区間進入時、及び脱出時の瞬間速度または検出区間走行中の平均速度を推定し、前記瞬間速度、前記平均速度、最大加速度、最大減速度、最高速度のうち少なくとも一つを用いて移動体長の最小及び最大長を推定し、列車運行管理システムは移動体長計測装置を用いて列車長を推定し、画面上への列車存在範囲を表示する。
(もっと読む)
長尺体の直線度の経時変化を把握する方法、システム
【課題】長尺体の直線度の経時変化を把握する方法およびシステムを提供すること。
【解決手段】長尺体の直線度の経時変化を把握する方法は、角速度センサーが取り付けられた移動体を、長尺体にガイドされながら移動させる移動工程(S3)と、前記移動体が移動した際の前記角速度センサーの姿勢の変化の情報を前記角速度センサーが取得する取得工程(S4)と、前記角速度センサーの姿勢の変化の情報と前記長尺体における移動中の前記角速度センサーの位置との関係を、情報処理部が関連づけして情報処理する情報処理工程(S5)と、定期的に前記移動体を移動させ、その都度前記情報処理部が前記情報処理し、該情報処理した結果の経時変化を、記憶部が記憶する記憶工程(S6)と、を具備することを特徴とする。
(もっと読む)
長尺体の直線度測定装置、長尺体の直線度測定方法
【課題】長尺体の直線度を容易に測定することを考慮した直線度測定装置を提供すること。
【解決手段】長尺体13の直線度測定装置1は、第1直線ガイド部材2と、第2直線ガイド部材3と、移動体4と、角速度センサー(5)と、情報処理部10と、測定対象の長尺体13と前記第2直線ガイド部材3とが一つの直線軸を形成するように、前記測定対象の長尺体13を取り付け可能な取り付け部11と、を備え、前記移動体4が、前記第1直線ガイド部材2と前記長尺体13とにガイドされて一の方向へ移動し、前記移動体4が移動している間の前記角速度センサー(5)の姿勢の変化の情報と前記長尺体13における移動中の前記角速度センサー(5)の位置との関係を、前記情報処理部10が関連づけして情報処理することにより前記長尺体13の直線度を測定する構成であることを特徴とする。
(もっと読む)
姿勢推定装置
【課題】 異なる複数のセンサの各出力に対し、各センサの線形動特性の逆伝達関数を用いて補償すると共に、この逆伝達関数に対応したフィルタを施し、最終的に姿勢変換を行うようにして、姿勢推定を適切且つ高精度に行える姿勢推定装置を提供する。
【解決手段】 角速度センサ10と傾斜計20の各逆モデルを動特性補償部分と姿勢変換部分とに分け、センサ動特性については近似線形特性として伝達関数を同定し、その逆伝達関数を用いて特性を補償すると共に、逆伝達関数に対応してフィルタを設計し、且つ出力信号への姿勢変換演算の前にフィルタを施すようにすることから、逆伝達関数を用いた特性補償で、有効周波数領域の拡大を図りつつ、逆伝達関数とフィルタの伝達関数の積についてはプロパーな伝達関数とすることができ、確実な演算処理で姿勢推定が実行でき、複数のセンサを用いる相補フィルタの手法で精度のよい姿勢推定を行える。
(もっと読む)
熱間長尺材の長さ測定方法および装置
【課題】熱間圧延後の長尺材がその長さ方向に搬送されつつある時に、その長さを精度良く、しかも安価に、測定することができる、熱間長尺材の長さ測定方法および装置を提供する。
【解決手段】後端センサとしてのロードセル10から搬送ライン下流側に順次所定のセンサ配置間隔で複数のアナログHMD121、122‥‥12nを配置し、最上流側のアナログHMD121を用いて先端検出用の閾値を決定し、該決定した閾値を下流側のアナログHMD122‥‥12nに設定してこれらを先端センサとして用いる。長尺材(鋼管)1の長さは、後端センサ(ロードセル)での後端検出時刻と、その直前に先端検出した先端センサ(アナログHMD)での先端検出時刻と、センサ配置間隔とから算出される。
(もっと読む)
傾斜角度推定システム、相対角度推定システム及び角速度推定システム
【課題】積分演算をデータ処理に含めず又は積分演算処理工程を最小限しか行わず、回転運動する物体の姿勢又は速度状態を推定する。
【解決手段】一の回転中心点を有し該回転中心点を軸として回転する一の物体と、該回転中心点において一の物体と接続し回転中心点を軸として回転する他の物体との間の相対的角度を推定するシステムであり、一の物体に取付けられた2以上の加速度センサからなる第1の加速度センサ群と、他の物体に取付けられた2以上の加速度センサからなる第2の加速度センサ群と、これらの群の加速度センサからの出力に基づいて物体の傾斜角を算出する演算処理ユニットからなり、第1の群の加速度センサは一の物体上で一線上に整列し、第2の群の加速度センサは一の物体上で一線上に整列し、第1の群を構成する加速度センサを結ぶ線と第2の群を構成する加速度センサを結ぶ線が共に回転中心点を通過する。
(もっと読む)
転がり軸受の振動値予測方法及び転がり軸受の製造方法
【課題】転がり軸受の組み付けに先だって、転がり軸受の振動値を予測することができる、或いは振動値を制御することができる転がり軸受の振動値予測方法及び転がり軸受の製造方法を提供する。
【解決手段】外輪軌道面11a及び内輪軌道面12aにおけるうねりの中でnZ(n:正の整数)山、(nZ+1)山、及び(nZ−1)山成分の外輪振幅総和値及び内輪振幅総和値と、転動体13の転動面13aにおけるうねりの中で2m(m:正の整数)山成分の転動体振幅総和値と、から統合振幅総和値を求めると共に、統合振幅総和値が既知の転がり軸受10を回転させたときの振動値を測定して、統合振幅総和値と振動値との相間関係を求め、この相間関係に基づいて使用する転がり軸受10に対して計算された統合振幅総和値から振動値を、或いは、振動値から使用する転がり軸受10に許容される統合振幅総和値を予測する。
(もっと読む)
車両の路面傾斜角算出装置
【課題】本発明は、バラツキを抑え、精度良く路面の傾斜角を算出することのできる車両の路面傾斜角算出装置を提供することにある。
【解決手段】車速センサで検出される現在の車速Vが所定車速V0以下であれば(S14)、車速V、ブレーキ圧センサで検出されるブレーキ油圧P、走行負荷トルク検出部で検出される走行負荷トルクT及びタイマで計測される時間Sを積算し、車速積算値Vtotal、ブレーキ油圧積算値Ptotal、走行負荷トルク積算値Ttotal及び計測時間Stotalを算出し(S16)、車速センサで検出される現在の車速Vが0km/hで車両が停止したところで(S18)、車速積算値Vtotal、ブレーキ油圧積算値Ptotal、走行負荷トルク積算値Ttotal及び計測時間Stotalより坂路傾斜角θを算出する(S20-S32)。
(もっと読む)
枕木変位計測システム
【課題】枕木の変位量を簡単に計測でき、変位量から道床・路盤の状態を客観的に判定することができるため、軌道の保守点検作業においてより一層の効率化および信頼性の向上を図ることができる枕木変位計測システムを提供する。
【解決手段】レールを締結固定する枕木に沿った水平方向と、レールに沿った垂直方向と、これら2つの方向に直交する重力方向との三軸方向の加速度を検出する三軸加速度検出手段と、その検出結果における不要な(衝撃・定常)成分を除去するフィルタと、この不要な成分を除去されたデータに対し、積分演算を施して枕木の変位量を算出し、その変位量から必要変位波形を抽出して得た必要変位波形から最大変位量を算出する手段とを具備する変位量測定装置を設け、列車が通過する際の列車全体に対する枕木の変位波形および変位の最大値、変位に伴う三軸方向の最大加速度を計測可能とした。
(もっと読む)
形状推定システム、角度推定方法及び対象物数推定方法
【課題】2次元平面上の対象物の形状の外周を構成する線分がなす内角を推定する。
【解決手段】複合センサノードは、予め定められた形状をなすように配備され、センシングエリア内における形状推定対象物の有無を検出する複数のセンサと、センサのそれぞれが検出した形状推定対象物の有無を示す検出結果情報をサーバに送信する送信手段とを備え、サーバは、形状推定対象物の頂点の内角がαの場合に、複合センサノードのうち、特定の複合センサノードが形状推定対象物を検出し、その他が検出しないセンシング結果となる複合センサノードの集合の測度を、複合センサノードのパラメータとαから計算する測度計算手段と、測度から内角α1,・・・,αn(nは内角の数)である場合のセンシング結果の期待値を計算する期待値計算手段と、センシング結果と期待値の差分を小さくする内角α1,・・・,αnを探索する探索手段とを備える。
(もっと読む)
回転角度検出装置
【課題】回転体の回転角度を演算する演算部において、検出結果をより確実に用いることができるように出力することができる技術を提供する。
【解決手段】回転体に取り付けられたギアにより回転力が付与されて回転する第1の従動ギアおよび第2の従動ギアそれぞれの回転角度を検出する第1の回転角度センサおよび第2の回転角度センサと、第1の回転角度センサおよび第2の回転角度センサにより入力された検出結果に基づいて回転体の回転角度を演算するECUとを備え、第1の回転角度センサおよび第2の回転角度センサの少なくともいずれかは、検出した回転角度に応じたデューティ比を有するパルス幅変調信号を、立ち上がりエッジおよび立ち下がりエッジのいずれか一方のエッジが予め定められた周期となるように出力するとともに、検出した回転角度に応じた時間に予め定められた時間TPを加算した時間を一方のエッジから他方のエッジまでの時間とする。
(もっと読む)
測定方法及び測定装置
【課題】簡便な方法で又簡単な装置で、移動体に設定された測定点、測定点間の距離の測定、或はGPS、IMU等の座標系に対するオフセット量を測定する。
【解決手段】移動体1に対して設定した座標系に対して所定の関係に測定棒6を設置し、該測定棒6の所定位置を移動体1が設置されている地面に転写すると共に測定対象物の測定点を地面に転写し、転写された前記所定位置と転写された前記測定点間の地面上での距離を測定し、距離測定結果に基づき測定点と前記測定棒6の地面上での関係を求め、得られた関係と前記座標系に対する測定棒6との関係から前記測定点の前記座標系に於ける水平座標面での位置を求める測定方法に係り、又前記所定位置と地面、前記測定点と地面との鉛直距離を測定し、前記座標系に於ける前記測定点の3次元位置を測定する。
(もっと読む)
動き検出装置および方法
【課題】 動き検出装置および方法を提供する。
【解決手段】 1つ以上の第1回転角測定センサを用いて第1角を測定し、1つ以上の第2回転角測定センサおよび前記1つ以上の第1回転角測定センサと相違する1つ以上の2軸の角速度センサを用いて第2角を推定し、1つ以上の第3回転角測定センサおよび前記1つ以上の2軸の角速度センサを用いて前記2軸のうちのいずれか1つである第3角を推定する動き検出装置を提供する。
(もっと読む)
携帯端末
【課題】 空間的に離間した複数の撮影点で同じ対象物を被写体として撮影して撮影点間の相対位置を判定することができる携帯端末を提供する。
【解決手段】 被写体を撮影して静止画像を生成するカメラ16と、カメラ16の光軸の向き及び光軸を中心とする傾きを検出する姿勢検出部32と、静止画像から特徴点を抽出する特徴点抽出部24aと、静止画像内の特徴点に対応する被写体上の点及び当該静止画像の撮影が行われた撮影点間の距離を測定する距離測定部25と、第1撮影点で撮影された第1画像内の特徴点について測定された距離、第2撮影点で撮影された第2画像内の上記特徴点について測定された距離、並びに、第1撮影点及び第2撮影点でのカメラ16の向き及び傾きの各検出結果に基づいて、第1撮影点に対する第2撮影点の相対位置を判定する位置判定部26により構成される。
(もっと読む)
1 - 20 / 73
[ Back to top ]