
Fターム[2F077JJ08]の内容
感知要素の出力の伝達及び変換 (32,270) | 磁気センサを用いた変換(計数型以外) (2,055) | センサの形式 (802) | 磁電変換素子 (757) | ホール素子 (359)
Fターム[2F077JJ08]に分類される特許
1 - 20 / 359
非接触式回転角度検出装置、その製造方法およびスロットル弁制御装置
回転角度検出装置
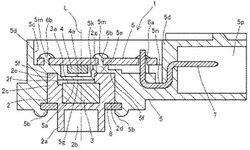
【課題】小型化薄型化を図り、耐振動性に優た回転角度検出装置を提供する。
【解決手段】回転部材2と、回転部材2に固定され回転する磁石3と、磁石3に対向して配置され磁石3の回転することにより変化する磁界の強さを検出する磁気検出部4と、回転部材2を回転自在に収納する第1収納部5aと磁気検出部4を収納する第2収納部5cとを有し第1収納部5aと第2収納部5cと区切る仕切部5eを備えたハウジング5と、を備えた回転角度検出装置1において、回転部材2の端部に第1収納部5aの底面である仕切部5eに接し回転部材2の外周と連続した凸状ガイド2eを設け、この凸状ガイド2eの内側に第1凹部2fを設け、第1収納部5aに凸状ガイド2eを案内する凹状溝5fを設けるとともに、この凹状溝5fの内側に凸部5gを設け、凸状ガイド2eの内側に第1ストッパ2gを設け、第1収納部5aの凸部5gの外側に第2ストッパ5hを設けたものである。
(もっと読む)
変位検出装置

【課題】磁性体の変位の検出精度を向上させることができる変位検出装置を提供すること。
【解決手段】変位検出装置1は、磁性体4、磁石6、磁気センサ7、およびヨーク9を備え、磁気センサ7の出力値に基づいて、磁性体4の変位を検出する。磁性体4は、磁石6および磁気センサ7の上方の位置と、少なくとも磁気センサ7の上方から外れた位置との間を変位する。磁石6および磁気センサ7の上下にある磁性体4とヨーク9により、磁石6の発生する磁束が集中して、磁気センサ7に誘導される。
(もっと読む)
位置検出装置
【課題】記憶回路の冗長性を確保すると共に、電源電圧が低下した場合に所望の出力を得ることの可能な位置検出装置を提供する。
【解決手段】位置検出装置としての磁気検出IC10は、通常動作モードの際、磁気検出素子11から出力された信号をDSP13によって処理した後、F/F14に記憶し、D/A16を経由して外部へ出力する。その際、F/F14の出力値をメモリ17が記憶する。モニタ回路40は、電源瞬断モードを検知すると、F/F14とメモリ17との間の信号、およびF/F14とD/A16との間の信号を遮断する。そして更新を止めたメモリ17の信号をD/A16へ出力する。一方、モニタ回路40は、長時間電源落ち込みモードを検知すると、メモリ17の信号をHiまたはLoに固定し、D/A16へ出力する。
(もっと読む)
位置検出装置、及び駆動装置
【課題】高精度に位置情報を検出する。
【解決手段】位置検出装置は、被駆動体の位置に応じて互いに異なる位相差を有する出力信号を出力するn個の検出素子と、n個の検出素子に対して出力信号を逐次出力させて、n個の出力信号によって信号の1周期を構成された第1の検出信号を出力する出力部と、出力部から出力された第1の検出信号の1周期の周波数である基本周波数を含む所定の通過周波数帯域を有し、第1の検出信号のうちの所定の通過周波数帯域を通過させて位相変調された第2の検出信号を出力するフィルタ部と、フィルタ部から出力された第2の検出信号に基づいて、被駆動体の位置情報を検出する位置検出部と、を備える。検出素子の個数を示すnの値は、出力部から出力された第1の検出信号に含まれる検出素子の出力信号の誤差成分のうちの少なくとも所定次数の誤差成分を低減するように定められている。
(もっと読む)
位置検出装置
【課題】検出精度の高い小型の位置検出装置を提供する。
【解決手段】第1磁石21および第2磁石22は、ストローク方向に直線移動するストローク部61に設けられる。第1磁石21および第2磁石22は、ストローク方向と直交する方向において同一方向に着磁され、ストローク方向に離間するよう設けられている。ホール素子51は、第1磁石21および第2磁石22の固定部と対向する端部から所定距離d離れて位置し、固定部70に設けられ、ストローク方向に直交する感磁面511を有する。
(もっと読む)
位置検出装置
【課題】磁石とホールICとの位置ずれに対するロバスト性に優れた位置検出装置を提供する。
【解決手段】第1磁石11と第2磁石12は仮想平面αを挟んで可動部2に設けられ、互いに向き合う磁極が同磁極となるようにZ軸方向に着磁される。その第1磁石11および第2磁石12よりも可動部2から離れた位置で可動部2に対し相対移動可能に設けられたホールIC5は、ストローク方向に直交する感磁面511を通過する磁束密度に応じた信号を出力する。これにより、第1磁石11の磁界と第2磁石12の磁界とが反発しあい、磁界の向きがストローク方向に平行となる領域が形成されるため、磁石とホールICとの位置ずれに対するロバスト性を高めることができる。また、第1磁石11と第2磁石12の磁界が可動部2に吸引されることが抑制され、ホールIC5の周囲の磁界強度が大きくなる。
(もっと読む)
非接触型磁気線形位置センサー
【課題】本発明は、線形位置センサーなどの磁気位置センサーに関し、より詳細には磁石の位置によって変化する信号を生成するように構成された複数の磁石を有するようなセンサーに関する。
【解決手段】位置センサーにおいて、2つの磁場センサーが検知される移動に平行な線に沿って配置される。2つの磁石は、それらの配置が、センサーの出力の間の差の線形または概ね線形の関数であるように、互いに磁場を生成する角度で配置される。
(もっと読む)
位置検出装置
【課題】補正および調整による精度向上を図った位置検出装置を得る。
【解決手段】第2の固定磁性体20と第3の固定磁性体30の対向面間にバイアス用の電磁石60を設置して、磁気センサ50の検知する磁束密度の範囲を変更し、磁束密度ゼロが含まれるようにする。磁気センサ50の温度特性等の補正および調整は、磁束密度ゼロの状態で行う。
(もっと読む)
位置検出装置
【課題】外部ノイズまたは外部磁界があっても磁束密度検出の直線性精度を確保した位置検出装置を得る。
【解決手段】第1の固定磁性体10と第2の固定磁性体20のギャップは、直線部12と直線部21が対向する側で狭く、さらに突出部22等の磁性体で囲まれているため、外部磁界等の影響を比較的受け難い。一方、直線部13と直線部21が対向する側のギャップは広いので外部磁界等の影響を受け易いため、シールド板50を配置して耐性を確保する。
(もっと読む)
位置検出装置及び位置検出方法並びにそれを用いた電子機器
【課題】長い距離にわたって温度に依存することなく高いリニアリティを比較的小さな機構体積で確保すること。
【解決手段】3個のホール素子のうち中心位置にある第2のホール素子81bと、この第2のホール素子に対して等間隔に配置された第1及び第3のホール素子81a,81cとを備え、比較判定回路83は、第2のホール素子81bからの出力信号の第2の差分信号の正負を判定して、この第2の差分信号が正(0を含む)ならば、第1のホール素子81aからの出力信号の第1の差分信号を出力し、第2の差分信号が負ならば、第3のホール素子81cからの出力信号の第3の差分信号を出力する。除算器84は、第2の差分信号を第1の差分信号で除算、もしくは第2の差分信号を第3の差分信号で除算する。
(もっと読む)
ポジションセンサ
【課題】小型化を図ることが可能なポジションセンサを提供すること。
【解決手段】ポジションセンサは、磁束を発生する磁石10及びその磁石10に対向して配置され同磁石10による磁束を検出するホールIC21〜23を備える。磁石10は、シフトレバーの操作に伴い、所定の直線に沿って移動されることで、その移動距離に対する磁束密度の変化が比例関係となる着磁態様を有する。シフトレバーの操作に伴い、磁石10が各ホールIC21〜23の設けられる直線に対し交差するかたちで直線運動されると、両直線のなす角度毎に、各ホールIC21〜23による検出信号の出力差が一義的に決まる。
(もっと読む)
回転情報算出装置、ステアリング装置、電動パワーステアリング装置、センサ付き軸受装置、車両、異常検出装置、回転情報算出方法及び異常検出方法
【課題】3相の磁気検出器の磁気検出信号の異常を検出することが可能であり、異常発生後も、3相中の2相の磁気検出信号が正常な場合に、継続して回転情報の計算を正確に行うことが可能な回転情報算出装置を提供する。
【解決手段】3相の磁気検出信号のサンプリング値a、b、cを取得し、取得したサンプリング値に基づいて、各相に対する回転角度位置を算出する。そして、これら算出した回転角度位置に基づき各相のサンプリング値の異常を検出するとともに、1相のサンプリング値のみに異常が検出されたときは、異常検出フラグを出力すると共に残りの2相のサンプリング値で回転角度位置の算出を行う。2相以上のサンプリング値の異常が検出されたときは、回転情報算出装置の動作を停止する。また、正常な相のサンプリング値に基づいて算出した回転角度位置の平均値を出力用の回転角度位置として算出する。
(もっと読む)
ポジションセンサ
【課題】小型化を図ることが可能なポジションセンサを提供すること。
【解決手段】ポジションセンサは、磁束を発生する磁石10及びその磁石10に対向して配置され同磁石10による磁束を検出するホールIC21〜23を備える。磁石10は、第1の直線に沿って移動されることで、その移動距離に対する磁束密度の変化が比例関係となる第1の着磁領域10Aを有する。また、磁石10は、第2の直線に沿って移動されることで、その移動距離に対する磁束密度の変化が上記比例関係とは傾き正負逆の比例関係となる第2の着磁領域10Bを有する。各ホールIC21〜23による検出電圧は、シフトレバーが第1の直線上の操作ポジションにある場合と、シフトレバーが第2の直線上の操作ポジションにある場合とで、大小関係が逆になる。
(もっと読む)
位置検出装置
【課題】 製品間の品質差を低減可能な位置検出装置を提供する。
【解決手段】永久磁石20は、固定部80に設けられる。ヨーク11は、回転部90に設けられ、永久磁石20の周囲に磁性材料により筒状に形成され、永久磁石20が発生した磁束が優先的に流入する弦部111を有する。弦部111は、内壁の他の部分に対し、永久磁石20に近接するよう形成される。ホール素子31は、固定部80に、永久磁石20に対して定位置に配置される。ホール素子31は、弦部111と永久磁石20との間の磁束の密度および角度に応じた信号を出力する。
(もっと読む)
位置検出装置、及び駆動装置
【課題】被駆動体の位置を高精度に検出する。
【解決手段】位置検出装置は、変調した駆動信号を生成する変調部と、変調部によって生成された駆動信号と被駆動体の位置とに応じた検出信号を出力する検出素子を有し、変調された出力信号を検出信号に基づいて出力する検出部と、検出部から出力された出力信号を周波数逓倍した逓倍信号を生成する信号逓倍部と、信号逓倍部によって生成された逓倍信号に基づいて、被駆動体の位置を検出する位置検出部と、を備える。
(もっと読む)
物理量検出装置、および物理量検出装置の検査方法
【課題】 出力波形の形状に影響されず補正の精確さを高める物理量検出装置、および物理量検出装置の検査方法を提供する。
【解決手段】ホール素子11は、ヨーク30の回転角の変化に応じた信号を出力する。DSP12は、予め記憶されている所定補正値に基づいてホール素子11の実出力値を補正し、補正された値に基づいてヨーク30の回転角を算出して出力する。所定補正値算出手段は、所定補正値を算出する。また、所定補正値算出手段は、所定回転角範囲内の実出力値に対して一次関数補間処理を行うことで算出される補間後実出力値と、当該補間後実出力値に対応する実出力値との差である一次誤差量に基づいて所定補正値を設定する
(もっと読む)
近接センサ
【課題】磁石のばらつきによる影響を受けない高精度の近接センサとする。
【解決手段】希土類ボンド磁石である磁石10の射出成形時にN、Sの磁極面間の中間に第1ヨークをインサート成形して、第1ヨークの突出部22を磁極面12に対して垂直な壁面から突出させる。第2ヨーク30の突起部32を突出部22に対向させて本体部31を磁石10の壁面に平行に配置し、突出部22と突起部32間の空間には当該突出部と突起部を結ぶ方向を磁気感応方向とするホールIC40を配置する。被検出部材50が磁極面12から離間しているときは磁束が磁気感応方向を横切るが、被検出部材50が磁極面12に近接すると突起部32と突出部22間を磁気感応方向に磁束が流れて、ホールIC40が磁束密度の変化を高感度で検出する。1個の磁石10のみを備えるので、複数の磁石ごとのばらつきや取付けのばらつきによる悪影響を受けない。
(もっと読む)
回転角度検出装置
【課題】磁電変換素子を備える回転角度検出装置であって、回転軸ずれや磁石の偏心に起因する角度誤差を抑制することのできる回転角度検出装置を提供すること。
【解決手段】回転角度検出装置400は、センサ実装基板7上の、第1及び第2の磁電変換素子を備えるセンサパッケージ6と、所定の回転軸8に対して回転する磁石5とを備える。センサパッケージ6が有する第1及び第2の磁電変換素子は、例えば図2に示したように、センサチップに設けられ、センサチップの表面に水平な磁場を検知することができる。磁石の回転軸8は、当該センサチップの表面に垂直な方向に配置されている。回転角度検出装置400では、磁石5として、センサチップの表面に平行な方向に着磁方向を有するものを用いる。磁石5は、さらに、着磁方向の最大長さが、着磁方向および回転軸に垂直な方向の最大長さよりも短い。
(もっと読む)
磁気式回転角検出装置及びブレーキバイワイヤ型制動制御装置
【課題】磁気式回転角検出装置に外乱磁界が作用して回転角検出誤差を生じる状態を的確に判定すること。
【解決手段】回転軸52の回転に伴って回転変位する磁石54と、磁石54の回転面に平行な面上に互いに直交方向する軸線方向に沿って配置され、90度の回転位相をもって磁石54の磁気強度を検出する2個の磁気検出素子58、・60と、磁気検出素子58、60により検出される磁気強度を合成した合成ベクトルに基づいて回転軸52の回転角を算出する回転角算出部62とを備えた磁気式回転角検出装置において、前記合成ベクトルの値と予め定められた閾値とを比較し、前記合成ベクトルの値が前記閾値を超えれば、異常を判定する異常判定部64を設ける。
(もっと読む)
1 - 20 / 359
[ Back to top ]