
Fターム[2F077NN02]の内容
感知要素の出力の伝達及び変換 (32,270) | 計数型(スケール部材、符号部材) (4,729) | 形状又は構造 (2,192) | 円板状 (658)
Fターム[2F077NN02]の下位に属するFターム
周面に目盛形成 (75)
Fターム[2F077NN02]に分類される特許
1 - 20 / 583
回転検出装置およびその製造方法
薄肉の検出面を有する磁気式エンコーダ
角度検出器の自律校正方法、角度検出器、円周目盛校正装置および角度検出器の校正装置
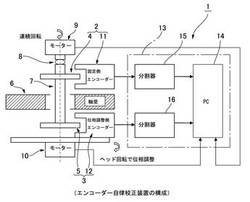
【課題】逐次2点法を用いて1回転の各角度位置において目盛誤差を精度良く算出可能な角度検出器の自律校正方法を提案すること。
【解決手段】角度検出器の自律校正方法は、第1目盛読取ヘッド11と第2目盛読取ヘッド12を、1回転を整数等分せず、且つ、複数回転Nを整数M等分する角度間隔αで配置し、目盛円板がN回転する間における第1、第2目盛読取ヘッド11、12の読みを、予め定めたデータサンプリング間隔でデータ読取装置13に取り込む。データ読取装置13では、第1、第2目盛読取ヘッド11、12の読みの差から、データサンプリング間隔で得られる、目盛円板4、5の角度目盛誤差に関する逐次2点法によるデータを生成し、複数回転N分のデータの平均がゼロになることを利用して、データを合成することで、目盛円板4、5の目盛誤差(校正値)をデータサンプリング間隔で求める。
(もっと読む)
アブソリュートエンコーダ

【課題】アドレス判定を正確に行うことができ、精度が高く低コストなエンコーダを提供する。さらに、アドレス切り換え位置近傍の識別を容易にする。
【解決手段】第1波長(λ)で等間隔の第1目盛が形成され、nλ(nは拡張数、λは第1波長)で第1アドレス区間を規定するように構成されているメイントラックと、前記第1アドレス区間と同じアドレス区間が(n+1)λa(λaは第2波長)となるように等間隔で第2目盛が形成された第1アドレストラックと、前記第1アドレス区間と同じアドレス区間が、n(λa+(n2−1)λ)+λaの第3目盛が形成された第2アドレストラックとを少なくとも有するスケール部(20)を有し、前記スケールから位相差を検出し、前記検出した複数の位相差に基づいてアドレス判定を行ない、被測定対象の位置または角度を算出する処理手段(30、40、50、60、70、80)とを有する。
(もっと読む)
被読取板固定用部材、被読取板固定用組立体、及び信号検出装置、並びにロータリーエンコーダ
【課題】
本発明は、回転軸に被読取板を取り付け固定する際等において、被読取板を有効に保護することができる被読取板固定用部材、被読取板固定用組立体、及び信号検出装置、並びにロータリーエンコーダを提供する。
【解決手段】
例えば、回転軸10に被読取板40を取り付け固定する際等において、回転軸10に係合して回転軸10に被読取板40を固定する部材であり且つ被読取板40の外形と同等もしくはそれ以上の外形を有する被読取板固定用部材30を用いることにより、作業者の指先等が被読取板40に接触すること等を有効に防止でき、また、被読取板40の取り付け固定後においても、被読取板40を有効に保護するようにしたものである。
(もっと読む)
位置検出装置、回転式アクチュエータ、および、それを用いたシフトバイワイヤシステム
【課題】パルス信号の出力に関する異常が生じても可動部材の位置の検出を継続可能な位置検出装置を提供する。
【解決手段】エンコーダ40は、モータ軸21が回転するのに応じ、所定の位相差を有する3相のパルス信号を出力する。ECU3は、カウント値を保持し、エンコーダ40が出力する3相のパルス信号のすべてが正常のとき出現する各パルス信号の組み合わせパターンである正常時パターン、および、3相のパルス信号のうち1相のパルス信号が異常のときのみ出現する各パルス信号の組み合わせパターンである異常時パターンに基づき、前記カウント値に対し第1所定値「1」、または、第2所定値「2」を加算または減算する。ECU3は、前記カウント値に基づき、モータ軸21の回転位置を検出する。
(もっと読む)
変位検出装置、車両用操舵装置及びモータ
【課題】検出精度を低下させることなく、装置全体としての回路規模をより縮小することができる変位検出装置、車両用操舵装置及びモータ。
【解決手段】モータ回転角センサ16は、複数のホール素子HA〜HCと、これら複数のホール素子HA〜HCを動作させるための電力供給をそれぞれ遮断可能な複数のスイッチSWA〜SWCとを備える。
(もっと読む)
エンコーダ装置及びエンコーダ装置のための補正方法
【課題】 内挿精度の低下を極力抑えて、検出対象物の回転角度又は移動位置を高精度で検出する。
【解決手段】 磁気センサ10は、検出対象物の回転又は移動に応じて互いに90度だけ位相の異なる正弦波状のA相出力信号及びB相出力信号を出力する。A相出力信号及びB相出力信号のそれぞれにおいて、サンプリング値とそれを180度シフトしたサンプリング値の差が最小となる同一位相のサンプリング値を抽出し、前記抽出したサンプリング値の平均値をオフセット補正値として計算する。これらのオフセット値を用いて、A相出力信号及びB相出力信号のサンプリング値をオフセット補正して検出対象物の回転角度又は移動距離を計算する。
(もっと読む)
エンコーダ及びエンコーダのパターン検出方法
【課題】符号板の回転数が高くなった場合でも適切に誤動作を検出することができるエンコーダ及びエンコーダのパターン検出方法を提供すること。
【解決手段】パターンを有し、回転軸を中心として回転する回転部と、パターンを検出する第一パターン検出部と、当該第一パターン検出部とは別にパターンを検出する第二パターン検出部と、第一パターン検出部又は第二パターン検出部における検出異常の有無を検出する制御部とを備える。
(もっと読む)
エンコーダ及びエンコーダのパターン検出方法
【課題】検出精度を向上させ、高精度を有するエンコーダを提供すること。
【解決手段】パターンを有し、回転軸を中心として回転する回転部と、パターンを検出する第一パターン検出部と、当該第一パターン検出部とは別にパターンを検出する第二パターン検出部と、第一パターン検出部又は第二パターン検出部における検出異常の有無を検出する制御部とを備える。
(もっと読む)
エンコーダ装置及びエンコーダ装置の回転情報検出方法
【課題】外部バッテリを用いずに、多回転情報を得ることができるエンコーダシステム及び信号処理方法を提供すること。
【解決手段】所定の回転軸を中心として回転する回転部と、当該回転部の第一回転情報を検出する第一検出部と、当該第一検出部とは別に回転部の第二回転情報を検出する第二検出部と、第一検出部又は第二検出部における検出結果の異常の有無を検出する制御部とを備える。
(もっと読む)
回転角度検出装置
【課題】電源回路の電圧変動が発生したときに生成されるノイズが出力される信号に含まれることを抑制することのできる回転角度検出装置を提供する。
【解決手段】電源回路80の電圧が所定範囲内である場合は第1信号を出力し、電源回路80の電圧が所定範囲外である場合は第2信号を出力する電源変動検出手段50を備える。そして、出力回路60は、比較器30から出力されたパルス信号および第1信号または第2信号が入力され、第2信号が入力されている期間は、第2信号が入力される前に比較器30から出力されたパルス信号に基づいてこの期間に比較器30から出力されると予測される第1予測パルス信号を出力する予測出力手段61と、比較器30から出力されたパルス信号および第1予測パルス信号が入力され、第2信号が出力されている期間は第1予測パルス信号を出力する出力調整手段62とを有する構成とする。
(もっと読む)
低電力磁場センサ
【課題】2つの磁界信号チャネルのサンプリングが同期し、これら2つのチャネルのサンプリング時間の差によるセンサ方向出力信号のあらゆる不正確性が除去される
【解決手段】低電力アプリケーションのための磁場センサ10は、サンプル間隔の間、検知される磁界に比例する信号を提供する磁界検知エレメント20を備えており、さらに、サンプル間隔の間、磁界信号と閾値レベルとを比較し、磁界の強度を示すセンサ出力信号を生成するコンパレータ回路30を備えている。二重サンプル速度機構によれば、最初は第1の所定のサンプル速度で磁界信号がサンプルされ、また、センサ出力信号の変化の検出に引き続く所定の間隔の間、第2のより速い所定のサンプル速度でサンプルされる。ユーザ・プログラマブル・サンプル速度機構によれば、ユーザが所定の固定サンプル速度すなわちユーザ指定サンプル速度でセンサを動作させることができる。磁場センサは、回転磁気物品の回転速度および/または回転方向を検出することができる。
(もっと読む)
位置検出装置、及び駆動装置
【課題】被駆動体の位置を高精度に検出する。
【解決手段】位置検出装置は、変調した駆動信号を生成する変調部と、変調部によって生成された駆動信号と被駆動体の位置とに応じた検出信号を出力する検出素子を有し、変調された出力信号を検出信号に基づいて出力する検出部と、検出部から出力された出力信号を周波数逓倍した逓倍信号を生成する信号逓倍部と、信号逓倍部によって生成された逓倍信号に基づいて、被駆動体の位置を検出する位置検出部と、を備える。
(もっと読む)
変位検出装置、制御装置、工作機械装置、照射装置および変位検出方法
【課題】エンコーダ等の変位検出手段により検出される変位の誤差を低減する。
【解決手段】アクチュエータ17の出力としての変位を検出する変位検出手段10を含む変位検出装置であって、振動する駆動指令Tmがアクチュエータ17に供給されて変位検出手段10により検出された変位の振幅と駆動指令Tmの振幅との比を変位の予め定められた範囲にわたって複数得、得られた複数の比に基づいて、変位検出手段10により検出された変位を補正する補正手段18を有する。
(もっと読む)
サーボモータ及びエンコーダ
【課題】回転軸の偏心による軸振れや振動等が生じた場合でも、エンコーダの位置検出精度の低下を抑制できるようにする。
【解決手段】モータの回転軸106と共に回転可能に設けられた回転ディスク202と、回転ディスク202の位置を検出する検出部を回転ディスク202に対して固定しつつ支持する反負荷側ブラケット103と、回転ディスク202を回転自在に反負荷側ブラケット103に支持させる反負荷側軸受105と、回転軸106と回転ディスク202とに連結され、回転ディスク202の回転軸106に対する径方向の相対位置の変動を弾性変形することにより許容しつつ、回転軸106の回転力を回転ディスク202に伝達可能な弾性伝達部材300とを有する。
(もっと読む)
モータ付属の仕切り構造、真空用モータ
【課題】真空側空間に不純物ガスを放出しないモータ付属の仕切り構造を提供する。
【解決手段】前記開口部と前記透過板との間において、高圧側から低圧側に向かって前記固着部材、前記密閉部材の順に設けられてなる。
(もっと読む)
回転機器用回転子、回転機器用回転子の着磁方法、磁気エンコーダおよびその製造方法
【課題】回転機器の回転子に着磁を行う技術において、着磁ヘッドを回転子に接触させて着磁を行う場合に、着磁ヘッドおよび回転子の一方または両方が磨耗する現象を抑える技術を提供する。
【解決手段】円筒形状のホルダであるロータ部材101と、ロータ部材101の外周面に固定された被着磁体であるマグネット層103とを備え、マグネット層103の外周面が塗装によって形成されたフッ素樹脂の層である摺動部材の層104で覆われていることを特徴とする回転機器用回転子。
(もっと読む)
角度を測定するための装置及び方法
【課題】改良された精度を有するアブソリュート角度エンコーダを提供する。
【解決手段】制御ユニット40が、処理ユニット41を有し、走査ユニット30−33の角度値が、少なくとも1つのインターフェース45−48を通じてこの処理ユニット41によって要求可能であり、かつ補正された1つの角度値に処理可能であり、この補正された角度値が、機器インターフェース42を通じてシーケンス制御回路100に対して伝送可能である。
(もっと読む)
エンコーダ
【課題】歯車機構を備えた位置検出装置と光学式エンコーダ装置とを備えたエンコーダを提供する。
【解決手段】ハウジング3が第1の収納部11と第2の収納部13との間に軸受けホルダ9を備えている。軸受けホルダ9は、歯車機構21と光学式エンコーダ装置7とを隔離する隔壁部を構成する。歯車機構21と光学式エンコーダ装置7とを隔離すると、歯車機構21から発生する磨耗粉やグリスが飛散して、光学式エンコーダ装置7の構成部品に付着することを確実に防止することができる。
(もっと読む)
1 - 20 / 583
[ Back to top ]