
Fターム[2F077TT35]の内容
感知要素の出力の伝達及び変換 (32,270) | 信号処理回路(特性補償雑音除去を除く) (4,069) | パルス化、アナログ−デジタル変換 (802) | 比較器、シュミット回路、差動増幅器を使うもの (198)
Fターム[2F077TT35]に分類される特許
21 - 40 / 198
位置検出装置
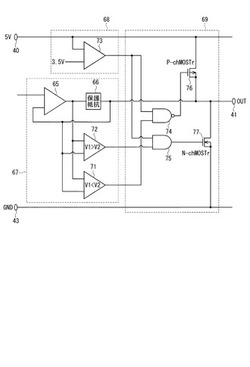
【課題】電源電圧が低下した場合の挙動仕様を共通にすることの可能な位置検出装置を提供する。
【解決手段】ホール素子の電圧信号を処理する信号処理回路から出力された電圧信号がバッファアンプ65によって緩衝増幅され、出力端子41を通じてECUに伝送される。電流検出回路67は出力端子41を流れる電流の向きを検出する。電源電圧検出回路68はホールICに供給される電源電圧の低下を検出する。電源電圧が低下したことを示す信号が電源電圧検出回路68から出力されると、電圧切替回路69は、出力端子41からECUに出力される電圧信号を電流検出回路67の検出した電流の向きに応じて高電圧側又は低電圧側にする。これにより、ECUの受け回路に設けられたプルアップ抵抗又はプルダウン抵抗に対応する電圧信号がECUに出力される。
(もっと読む)
回転角度検出装置

【課題】主に自動車のブレーキペダル等の回転角度検出に用いられる回転角度検出装置に関し、簡易な構成で、確実な回転角度の検出とストップランプの消点灯等が可能なものを提供することを目的とする。
【解決手段】磁石16の回転中心に対して所定角度間隔で、複数の磁気検出素子18Aと18Bを対向配置すると共に、磁気検出素子18Aと18Bからの検出信号L1とL2を加算または減算して回転角度を検出する第一の制御回路19と、検出信号L1とL2を除算した後、逆関数に変換して回転体12の回転角度を検出する第二の制御回路21と、印加された電圧に応じて、第一の制御回路19と第二の制御回路21のいずれを動作させるか切換えるスイッチング回路24を備えることによって、簡易な構成で、確実な回転角度の検出とストップランプの消点灯等が可能な回転角度検出装置27を得ることができる。
(もっと読む)
インクリメンタル位置測定機構の位置信号を監視するための監視ユニットおよび方法
【課題】インクリメンタル位置測定機構の位置信号を監視するための監視ユニットおよび方法を提供する。
【解決手段】監視ユニット200において、走査ユニット16によるインクリメンタル目盛格子トラック14の走査から得られ、互いに位相がずれている少なくとも2つの位置信号P0、P90、P180、P270が入力される。監視ユニット200は、様々な位置信号P0、P90、P180、P270から、位置に応じた少なくとも2つの状態データワードZ1、Z2、Z3、Z4を生成することができる信号結合ユニット210と、状態データワードZ1、Z2、Z3、Z4が送信される評価ユニット220からなり、評価ユニット220では状態データワードZ1、Z2、Z3、Z4の比較によって無効の状態を確定することができ、無効の状態が確定された場合にエラー信号Fを生成することができる。
(もっと読む)
回転センサ
【課題】構造誤差等に起因する位相ずれを反映して相対回転角度をより正確に演算し得る回転センサを提供する。
【解決手段】回転センサ1において、角度演算部60は、複数の磁電変換素子から出力されるsinNθ信号及びcosNθ信号に対して予め設定されたずれ量αが反映されたsin(Nθ+α)信号及びsin(Nθ−α)信号を生成しており、sin(Nθ+α)信号及びsin(Nθ−α)信号に対して、ずれ量αに応じた補正値を用いて補正を行うことでsin(Nθ−Nφ)信号を生成し、且つsin(Nθ−Nφ)信号に基づく偏差(Nθ−Nφ)が所定値になるようにフィードバック制御を行って相対回転角度θを演算している。
(もっと読む)
回転角度検出装置
【課題】主に自動車のブレーキペダル等の回転角度検出に用いられる回転角度検出装置に関し、簡易な構成で、確実な回転角度の検出とストップランプの消点灯等が可能なものを提供することを目的とする。
【解決手段】回転体12に装着された磁石16の回転中心に対して、所定角度間隔で複数の磁気検出素子18Aと18Bを対向配置すると共に、制御回路19が複数の磁気検出素子18Aと18Bからの検出信号L1とM1を加算または減算し、演算信号N1やP1から回転体12の回転角度を検出することによって、高精度な回転角度の検出が行えると共に、簡易な構成で、確実な回転角度の検出と、ストップランプの消点灯等が可能な回転角度検出装置を得ることができる。
(もっと読む)
センサ異常判定装置
【課題】ストロークセンサの異常を適切に判定できるセンサ異常判定技術を提供する。
【解決手段】第1監視部102は、非接触式の第1ストロークセンサ46aの第1出力電圧を監視する。第2監視部104は、非接触式の第2ストロークセンサ46bの第2出力電圧を監視する。異常判定部122は、監視結果を受け取り、第1ストロークセンサ46aまたは第2ストロークセンサ46bに異常が生じたか否かを判定する。判定制御部124は、異常判定部122による判定処理の実行を制御する。第1監視部102には、監視可能な上限監視電圧V1が設定されている。第1電圧判定部126は、第1出力電圧が上限監視電圧V1以上となる可能性があるか否かを判定し、可能性があれば、判定制御部124が、異常判定部122による判定処理を停止する。
(もっと読む)
磁気式リニアエンコーダ
【課題】磁気式リニアエンコーダのスケールは一定間隔でN極、S極が繰り返し着磁された永久磁石が使用されるのが一般的であるが、長尺になると長い磁石を作る必要があり、磁石の製造が困難となり、さらに磁石と一般金属材料との熱膨張率の差から温度上昇により位置検出精度が劣化する。
【解決手段】移動する検出対象物に検出部と磁石を取り付け、スケールは交互に間隔を開けて設けられた多数の第1のヨーク板と第2のヨーク板よりなり、着磁された移動する磁石により第1のヨーク板および第2のヨーク板が互いに異極に着磁され、検出部が着磁されたヨークの磁場を検出する構成とする。これにより多数のヨークを積層する事により長尺のスケールを構成でき、磁石を長尺とする必要がない。またヨークは軟磁性金属であるため、昇温時の磁性材料と構造用金属の熱膨張率の差による検出精度の低下がない。
(もっと読む)
回転角検出システムの異常診断装置
【課題】モータの回転角を検出するレゾルバの出力信号(SIN信号とCOS信号)に基づいて断線の有無を判定するシステムにおいて、断線を早期に検出できるようにする。
【解決手段】モータ制御システムの起動直後に、レゾルバ22の出力信号を用いない他制制御により交流モータを回転させて、その回転中にレゾルバ22の出力信号(マイコン27に入力されるSIN信号とCOS信号)に基づいて断線(励磁信号線L1とSIN信号線L2とCOS信号線L3のいずれかの断線)の有無を判定する異常診断を実行する。これにより、交流モータの回転前のレゾルバ22のロータ回転停止位置が異常検出不可領域の場合でも、もし断線が発生していれば、交流モータの回転に伴ってレゾルバ22のロータ回転位置が異常検出可能な領域に入ったときに、その断線を検出することができ、モータ制御システムの起動直後の早期に断線を検出することができる。
(もっと読む)
回転角検出装置、および、これを用いた電動パワーステアリング装置
【課題】中間値固着異常が生じていることを適切に判断することができる回転角検出装置、および、これを用いた電動パワーステアリング装置を提供する。
【解決手段】回転角検出装置10の制御部50は、ハーフブリッジ14〜17から出力される出力信号Vx1、Vx2、Vy1、Vy2を、ハーフブリッジ14〜17毎に取得する。制御部50は、取得された出力信号Vx1、Vx2、Vy1、Vy2に基づき、被検出部87の回転角度θを算出する。制御部50は、取得された出力信号Vx1、Vx2、Vy1、Vy2に基づいて算出される演算値C1またはC4に基づき、演算値C1またはC4の算出に用いた出力信号Vx1、Vx2、Vy1、Vy2に中間値固着異常が生じているか否かを判断する。これにより、中間値固着異常が生じているか否かを適切に判断することができる。
(もっと読む)
回転子の位置検出方法、電動機の制御方法、電動機制御装置及びプログラム
【課題】ノイズ等の外乱による誤動作や断線状態を検出できないR/Dコンバータを用いても回転子の回転位置に基づいて電動機の制御を滞りなく行う。
【解決手段】共通のコネクタC1,C2を介してそれぞれ第1及び第2のケーブル6,8で回転位置検出器2及びサーミスタ4が接続される処理部20において、回転位置検出器2の出力信号から回転位置に関する情報及び品質に関する情報を取得する第1の工程と、品質に関する情報が正常であるか否かを判断する第2の工程と、第2の工程で肯定的結果が得られた場合に当該回転位置に関する情報に基づいて回転位置を演算する第3の工程と、第2の工程で否定的結果が得られた場合に、当該品質に関する情報が異常となる頻度が予め定められた規定値以上か否かを判断する第4の工程と、第4の工程で否定的結果が得られた場合、第3の工程で演算された回転位置に基づいて、回転位置を補間して求める第5の工程とを実行する。
(もっと読む)
回転検出装置
【課題】第1センサ部の出力信号が所定レベルから変化しなくなる異常が生じている場合であれ、回転体の回転角度の変化量を的確に把握することができる。
【解決手段】クランクポジションセンサ42はクランクシャフト31が所定角度回転する毎にパルス状の信号を出力するメインセンサ61、サブセンサ62を有し、これらは互いに位相のずれた信号を出力する。サブ信号がハイレベルであり且つメイン信号が変化したとの条件が成立したときにこのときのメイン信号の変化方向に応じて異なるパルス幅のクランク信号を出力する。ECU41は、サブ信号がハイレベルから変化しなくなる異常が生じているか否かを判定し、同異常が生じている旨判定された場合にクランク信号のパルス幅と機関回転速度と上記異常時に出力されるクランク信号数との対応関係に基づき当該出力されるクランク信号数を正常時におけるクランク信号数に換算する。
(もっと読む)
車載機器用二値信号処理装置
【課題】車両側から車載機器に入力される二値信号の高レベル/低レベルの電位が未知の場合であっても、前記二値信号の2つの状態を正しく弁別し、高レベル及び低レベルの状態に応じてパルス状に変化する出力側二値信号を生成する。
【解決手段】入力側二値信号SG1の波形のアナログレベルをデジタル情報に変換して入力し、このデジタル情報から第1のレベル(高レベル)と第2のレベル(低レベル)とを検出し、前記第1のレベル及び第2のレベルに基づいて少なくとも1つの閾値を決定し、前記閾値に応じて基準レベル生成部の状態を自動的に調整するマイクロコンピュータ11と、前記基準レベル生成部に配置され前記マイクロコンピュータ11からのデジタル制御入力に従って抵抗値が決定される少なくとも1つのデジタルポテンショメータ16、17とを備える。
(もっと読む)
アナログ信号のデジタル変換方法
【課題】本発明は、負帰還制御ループ外に設けられていた減算器を排除し、負帰還制御ループ内に設けた加算器によって位相変調信号を得ることにより、カウンタから直接デジタル角度出力を得ることができると共に、減算器の異常検出をしなくても負帰還制御ループの異常検出によってカバーできるようにすることを目的とする。
【解決手段】本発明によるアナログ信号のデジタル変換方法は、R/D信号変換部(3)に接続された励磁信号発生部(8)とカウンタ(7)との間に設けた加算器(20)により、カウンタ(7)からのデジタル角度出力(φ)と位相基準(ωRt)とを加算し、前記加算器(20)で得られた位相変調信号(ωRt+φ)を励磁信号発生部(8)に入力し、カウンタ(7)からデジタル角度出力(φ)を直接出力する方法である。
(もっと読む)
リニアエンコーダとアクチュエータ
【課題】 Z相信号をより安定させ、確実に原点出しを行うことができ、信頼性が高く、コンパクト、且つ、低コストが容易になるように工夫したリニアエンコーダとそのようなリニアエンコーダを使用したアクチュエータを提供することである。
【解決手段】 原点用スケールパターンの符号系列が狭帯域化のための変調が掛かったパターンであることを特徴とするものであり、例えば、低コスト化容易なPETフィルム基材を用い、印刷により製作した反射面の平滑性が若干劣るリニアスケールを用いても、狭帯域化変調を施したスケールパターンを用いることにより、本来孤立ビットとなるZ相原点信号でも、信号振幅を確保することができる。又、差動検出により信号出力の増大やスレショルドレベルの安定化を図ることができる。
(もっと読む)
レゾルバ模擬回路
【課題】絶縁入出力回路による励磁信号位相遅れを補正することで,電磁ノイズにロバストで正確にレゾルバを模擬することが可能なレゾルバ模擬回路を提供する。
【解決手段】絶縁入力回路1出力の励磁信号を入力して励磁信号の位相θd=θx−Δθiを推定して出力する励磁位相検知回路と,該励磁位相検知回路の出力θdから絶縁入力回路1や絶縁出力回路90および91によって生じる位相遅れ分(Δθi+Δθo)だけ補正する位相補正器と,絶縁入力回路1の出力の励磁信号の振幅を出力するピークホールド回路と,レゾルバ信号生成器3の代りに,位相補正器出力θと所定変圧比Gと回転子位相αと前記ピークホールド回路出力の励磁信号の振幅VとからV・G・sin(α)・sin(θ)で表される正弦変調信号とV・G・cos(α)・sin(θ)で表される余弦変調信号とを求めて出力する第2レゾルバ信号生成器とで構成される。
(もっと読む)
インデックスセンサ
【課題】外部環境によらず、正しい回転基準位置の検出が可能なインデックスセンサを提供する。
【解決手段】回転体12の外周側の所定位置に取り付けられ径方向外方に向けて磁束を発生させる磁束発生手段13と、回転体12を臨むことができる静止系の所定位置に設置され、前記磁束を回転体12の回転軸Cに直交するY方向の磁束成分と、該Y方向の磁束成分と回転軸Cがなす面に直角なX方向の磁束成分とを独立に検出する磁気検出手段14と、磁気検出手段14が検出したY方向の磁束成分及びX方向の磁束成分から磁束の向きを演算する演算手段15と、前記磁束の向きに基づいて回転体12の所定位置が静止系の所定位置から所定回転角範囲内にあることを示す回転基準位置信号を発生させる回転基準位置信号発生手段16とを備える。
(もっと読む)
結合同調回路を使用して2つの物体の相対位置を検知する電磁方法
回転検出装置及び回転検出システム
【課題】エンコーダ等のセンサを設けることなく、直流モータの回転状態を精度良く検出できるようにすることを目的とする。
【解決手段】モータ2は、3相の各相コイルL1,L2,L3のうち第1相コイルL1と並列にコンデンサC1が接続された構成となっており、これにより、180°回転する毎にモータ回路のインピーダンスが二段階に変化する。制御部6は、モータ2をPWM制御にて駆動している。そのため、モータ2に流れる電流は、PWM制御による駆動スイッチMOSのON・OFFの切り替えに応じて脈動する。つまり、PWM制御によってモータ電流には交流成分が含まれることになる。また、回転に伴うモータ回路のインピーダンスの変化に応じて、その交流成分の振幅も変化する。そこで制御部6は、その交流成分の振幅変化に基づいて、モータ2の回転角や回転速度を検出する。
(もっと読む)
回転検出装置及び回転検出システム
【課題】エンコーダ等のセンサを設けることなく、回転速度にかかわらず直流モータの回転状態を精度良く検出できるようにすることを目的とする。
【解決手段】モータ2に対し、直流電源3から直流電圧を印加すると共に、重畳部5から交流電圧を印加(重畳)する。モータ2は、各相コイルL1,L2,L3のうち第1相コイルL1と並列にコンデンサC1が接続されており、これによりモータ回路のインピーダンスはモータ2の回転に伴って周期的に変化し、その変化はモータ2に流れる電流の交流成分の振幅変化(重畳部5からの交流電流の振幅変化)として現れる。重畳部5における直流電源3からの直流電流が流入しない直流非流入経路8には電流検出部21が設けられ、この電流検出部21にて検出された交流電流に基づいて回転パルスSpが生成される。そして、この回転パルスSpに基づき、回転角検出部7がモータ2の回転角を検出する。
(もっと読む)
磁気検出装置及び磁気エンコーダ
【課題】着磁方向が異なる2つの回転磁石を備えた場合でも、各センサの誤検知を防止すると共に装置全体の小型化を図ること。
【解決手段】磁気検出装置5は、回転軸2に回動自在に取り付けられると共に半径方向にN極とS極とが交互に着磁された第1の回転磁石3の磁界を第1の磁気抵抗効果素子14を用いて検知する第1の磁気センサ11と、回転軸2に回動自在に取り付けられると共に回転軸方向にN極とS極とが交互に着磁された第2の回転磁石4の磁界を第2の磁気抵抗効果素子16を用いて検知する第2の磁気センサ12と、を備え、第1の磁気抵抗効果素子14の感度軸方向と第2の磁気抵抗効果素子16の感度軸方向とを直交させて第1及び第2の磁気センサ11,12を同一基板13に設けた。
(もっと読む)
21 - 40 / 198
[ Back to top ]