
センサ異常判定装置

【課題】ストロークセンサの異常を適切に判定できるセンサ異常判定技術を提供する。
【解決手段】第1監視部102は、非接触式の第1ストロークセンサ46aの第1出力電圧を監視する。第2監視部104は、非接触式の第2ストロークセンサ46bの第2出力電圧を監視する。異常判定部122は、監視結果を受け取り、第1ストロークセンサ46aまたは第2ストロークセンサ46bに異常が生じたか否かを判定する。判定制御部124は、異常判定部122による判定処理の実行を制御する。第1監視部102には、監視可能な上限監視電圧V1が設定されている。第1電圧判定部126は、第1出力電圧が上限監視電圧V1以上となる可能性があるか否かを判定し、可能性があれば、判定制御部124が、異常判定部122による判定処理を停止する。
【解決手段】第1監視部102は、非接触式の第1ストロークセンサ46aの第1出力電圧を監視する。第2監視部104は、非接触式の第2ストロークセンサ46bの第2出力電圧を監視する。異常判定部122は、監視結果を受け取り、第1ストロークセンサ46aまたは第2ストロークセンサ46bに異常が生じたか否かを判定する。判定制御部124は、異常判定部122による判定処理の実行を制御する。第1監視部102には、監視可能な上限監視電圧V1が設定されている。第1電圧判定部126は、第1出力電圧が上限監視電圧V1以上となる可能性があるか否かを判定し、可能性があれば、判定制御部124が、異常判定部122による判定処理を停止する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、センサ異常判定技術に関し、特に、ブレーキペダルの操作量に応じた電圧を出力する非接触式ストロークセンサの異常を判定する技術に関する。
【背景技術】
【0002】
近年、電子制御によって最適な制動力を発生させる電子制御ブレーキシステムの開発が盛んに進められている。また従来は、ブレーキペダルの踏み込み量を摺動式のストロークセンサで検出することが一般的であったが、最近では、導電部材同士の接触を要しない非接触式のストロークセンサの開発も進められている。
【0003】
電子制御ブレーキシステムは、ブレーキペダルの踏み込み量およびマスタシリンダ圧に基づいて目標制動力を導出し、各車輪に与える目標ホイールシリンダ圧を算出する。しかしながら、ストロークセンサに異常が生じると、ブレーキ制御は、ストロークセンサの検出値を用いず、マスタシリンダ圧のみを用いて行われるようになる。特許文献1は、操作されていないときのブレーキペダルの位置に対してゼロ点補正を実行し、ゼロ点補正の実行直後に検出された検出値を利用して、異常判定を行うセンサ異常判定装置を開示する。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2010−36626号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
センサ異常判定装置は、ブレーキペダルに設けられた2つのストロークセンサの出力電圧がともに同じ踏み込み量を示していない場合に、ストロークセンサの異常を判定する。センサ異常判定装置は、ストロークセンサの出力電圧を監視する入力IC(Inetgrated Cicuit)を有しているが、センサの出力特性と入力ICの入力特性が互いに独立している場合には、電圧の使用範囲が異なるために、適切な異常判定を行うことが容易でないという問題がある。また、センサ異常判定装置がストロークセンサの異常を判定すると、ブレーキ制御にストロークセンサの検出値を用いることができなくなるため、異常が発生していないにも関わらず異常であると判定することは、適切なブレーキ制御を行うためにも極力避けることが好ましい。
【0006】
本発明はこうした状況に鑑みてなされたものであり、その目的は、2つのストロークセンサの出力電圧を利用するブレーキ制御装置において、ストロークセンサの異常を適切に判定できるセンサ異常判定技術を提供することにある。
【課題を解決するための手段】
【0007】
上記課題を解決するために、本発明のある態様のセンサ異常判定装置は、非接触式の第1ストロークセンサの第1出力電圧を監視する第1監視手段と、非接触式の第2ストロークセンサの第2出力電圧を監視する第2監視手段と、第1監視手段および第2監視手段の監視結果を受け取り、第1ストロークセンサまたは第2ストロークセンサに異常が生じたか否かを判定する異常判定手段と、異常判定手段による判定処理の実行を制御する判定制御手段とを備える。第1監視手段には、監視可能な上限監視電圧が設定されている。判定制御手段は、第1ストロークセンサの第1出力電圧が上限監視電圧以上となる可能性があるか否かを判定する第1電圧判定手段を有する。判定制御手段は、第1電圧判定手段により第1出力電圧が上限監視電圧以上となる可能性がないことが判定されると、異常判定手段による判定処理を実行させ、第1電圧判定手段により第1出力電圧が上限監視電圧以上となる可能性があることが判定されると、異常判定手段による判定処理を停止させる。
【0008】
この態様によると、第1ストロークセンサの第1出力電圧が上限監視電圧以上となる可能性がある場合に、異常判定手段による判定処理を停止させることで、第1監視手段の入力特性を加味したセンサ異常判定処理を実現できる。
【0009】
第1出力電圧と第2出力電圧は所定の関係にあり、第1電圧判定手段は、第2監視手段により監視される第2出力電圧から、第1出力電圧が上限監視電圧以上となる可能性があるか否かを判定してもよい。ここで所定の関係とは、センサ正常時に、一方の電圧から他方の電圧が導出できる関係をいう。第2出力電圧を用いることで、第1出力電圧が上限監視電圧以上となる可能性があるか否かの判定を、安定して実行することが可能となる。
【0010】
第1ストロークセンサは、ブレーキペダルの踏み込み量の増加に応じて第1出力電圧を増加し、第2ストロークセンサは、ブレーキペダルの踏み込み量の増加に応じて第2出力電圧を減少するものであって、第1電圧判定手段は、第2出力電圧が所定の閾値電圧以下になると、第1出力電圧が上限監視電圧以上となる可能性があることを判定してもよい。
【0011】
判定制御手段は、第1監視手段により監視される第1出力電圧が所定の上限センサ電圧以上であるか否かを判定する第2電圧判定手段を有してもよい。判定制御手段は、第2電圧判定手段により第1出力電圧が上限センサ電圧よりも小さいことが判定されると、第1電圧判定手段により第1出力電圧が上限監視電圧以上となる可能性があることが判定された場合であっても、異常判定手段による判定処理を実行させてもよい。これによると、実際に監視された第1出力電圧が上限センサ電圧よりも小さければ、異常判定処理による判定処理を停止させることなく、実行させることで、センサ異常の有無を適切に判定することができる。なお判定制御手段は、第2電圧判定手段により第1出力電圧が上限センサ電圧以上であることが判定されると、異常判定手段による判定処理を停止させる。
【発明の効果】
【0012】
本発明によれば、2つのストロークセンサの出力電圧を利用するブレーキ制御装置において、ストロークセンサの異常を適切に判定できるセンサ異常判定技術を提供することにある。
【図面の簡単な説明】
【0013】
【図1】実施形態に係るブレーキ制御装置の構成を示す図である。
【図2】実施形態に係るブレーキペダルの踏み込み量とストロークセンサの出力電圧の関係を示す図である。
【図3】実施形態に係るストロークセンサとECUの回路構成の模式図である。
【図4】ECUによるセンサ異常判定処理の機能ブロックを示す図である。
【図5】ストロークセンサの出力特性と、監視部に設定されている上限監視電圧Vとの関係を示す図である。
【発明を実施するための形態】
【0014】
図1は、実施形態に係るブレーキ制御装置の構成を示す図である。図1に示すブレーキ制御装置10は、車両用の電子制御式ブレーキシステム(ECB)を構成しており、運転者によるブレーキ操作部材としてのブレーキペダル12の操作量にもとづいて車両の4輪のブレーキを最適に制御するものである。
【0015】
ブレーキペダル12は、運転者による踏み込み量に応じて作動液を送り出すマスタシリンダ14に接続されている。ブレーキペダル12には、その踏み込み量を検出するための第1ストロークセンサ46aと第2ストロークセンサ46b(以下、総称する場合は「ストロークセンサ46」という)が設けられている。
【0016】
実施形態に係るストロークセンサ46は、非接触式のホールIC型の磁気センサである。第1ストロークセンサ46aおよび第2ストロークセンサ46bは、ともにブレーキペダル12の回転軸に設けられる。第1ストロークセンサ46aおよび第2ストロークセンサ46bは、図示しない共通の電源から電力を供給される。ストロークセンサ46は、ホールICの回路において検出した値に温度補正等を施してECU200に出力する。
【0017】
ストップランプスイッチ47は、ブレーキペダル12の踏み込みの有無を検出する。ストップランプスイッチ47は、車両の後方に設けられるブレーキランプの点灯制御に用いられる。たとえば、運転者によりブレーキペダル12が踏み込まれると、ストップランプスイッチ47がONされて、ブレーキランプが点灯し、ブレーキペダル12の踏み込みが解除されると、ストップランプスイッチ47がOFFされて、ブレーキランプが消灯する。
【0018】
マスタシリンダ14の第1出力ポート14aには、運転者によるブレーキペダル12の踏力に応じたペダルストロークを創出するストロークシミュレータ24が接続されている。
【0019】
マスタシリンダ14とストロークシミュレータ24とを接続する流路の中途には、シミュレータカット弁23が設けられている。シミュレータカット弁23は、通電することにより開弁し、非通電時に閉弁する常閉型の電磁開閉弁である。また、マスタシリンダ14には、作動液を貯留するためのリザーバタンク26が接続されている。
【0020】
マスタシリンダ14の第1出力ポート14aには、右前輪用のブレーキ油圧制御管18が接続されており、ブレーキ油圧制御管18は、右前輪に対して制動力を付与する右前輪用のホイールシリンダ20FRに接続されている。また、マスタシリンダ14の第2出力ポート14bには、左前輪用のブレーキ油圧制御管16が接続されており、ブレーキ油圧制御管16は、左前輪に対して制動力を付与する左前輪用のホイールシリンダ20FLに接続されている。
【0021】
右前輪用のブレーキ油圧制御管18の中途には、右電磁開閉弁22FRが設けられており、左前輪用のブレーキ油圧制御管16の中途には、左電磁開閉弁22FLが設けられている。これらの右電磁開閉弁22FRおよび左電磁開閉弁22FLは、何れも、非通電時に開状態にあり、通電時に閉状態に切り換えられる常開型電磁弁である。
【0022】
また、右前輪用のブレーキ油圧制御管18の中途には、右前輪側のマスタシリンダ圧を検出する右マスタシリンダ圧センサ48FRが設けられており、左前輪用のブレーキ油圧制御管16の中途には、左前輪側のマスタシリンダ圧を計測する左マスタシリンダ圧センサ48FLが設けられている。なお、以下では適宜、右マスタシリンダ圧センサ48FRおよび左マスタシリンダ圧センサ48FLを総称して、「マスタシリンダ圧センサ48」という。
【0023】
ブレーキ制御装置10では、運転者によってブレーキペダル12が踏み込まれた際、ストロークセンサ46によりその踏み込み量が検出されるが、これらの右マスタシリンダ圧センサ48FRおよび左マスタシリンダ圧センサ48FLによって検出されるマスタシリンダ圧からもブレーキペダル12の踏み込み操作力(踏力)を求めることができる。
【0024】
一方、リザーバタンク26には、油圧給排管28の一端が接続されており、この油圧給排管28の中途には、モータ32により駆動されるオイルポンプ34の吸込口が接続されている。オイルポンプ34の吐出口は、高圧管30に接続されており、この高圧管30には、アキュムレータ50とリリーフバルブ53とが接続されている。本実施形態では、オイルポンプ34として、モータ32によってそれぞれ往復移動させられる2体以上のピストン(図示せず)を備えた往復動ポンプが採用される。また、アキュムレータ50としては、作動液の圧力エネルギを窒素等の封入ガスの圧力エネルギに変換して蓄えるものが採用される。
【0025】
アキュムレータ50は、オイルポンプ34によって例えば14〜22MPa程度にまで昇圧された作動液を蓄える。リリーフバルブ53の弁出口は、油圧給排管28に接続されており、アキュムレータ50における作動液の圧力が異常に高まって例えば25MPa程度になると、リリーフバルブ53が開弁し、高圧の作動液は油圧給排管28へと戻される。さらに、高圧管30には、アキュムレータ50の出口圧力、すなわち、アキュムレータ50における作動液の圧力を検出するアキュムレータ圧センサ51が設けられている。
【0026】
そして、高圧管30は、増圧弁40FR、40FL、40RR、40RLを介して右前輪用のホイールシリンダ20FR、左前輪用のホイールシリンダ20FL、右後輪用のホイールシリンダ20RRおよび左後輪用のホイールシリンダ20RLに接続されている。以下、適宜、ホイールシリンダ20FR〜20RLを総称して「ホイールシリンダ20」といい、適宜、増圧弁40FR〜40RLを総称して「増圧弁40」という。増圧弁40は、何れも、非通電時は閉じた状態にあり、必要に応じてホイールシリンダ20の増圧に利用される常閉型の電磁流量制御弁(リニア弁)である。なお、図示されない車両の各車輪に対しては、ディスクブレーキユニットが設けられており、各ディスクブレーキユニットは、ホイールシリンダ20の作用によってブレーキパッドをディスクに押し付けることで制動力を発生する。
【0027】
また、右前輪用のホイールシリンダ20FRと左前輪用のホイールシリンダ20FLとは、それぞれ減圧弁42FRまたは42FLを介して油圧給排管28に接続されている。減圧弁42FRおよび42FLは、必要に応じてホイールシリンダ20FR,20FLの減圧に利用される常閉型の電磁流量制御弁(リニア弁)である。一方、右後輪用のホイールシリンダ20RRと左後輪用のホイールシリンダ20RLとは、常開型の電磁流量制御弁である減圧弁42RRまたは42RLを介して油圧給排管28に接続されている。以下、適宜、減圧弁42FR〜42RLを総称して「減圧弁42」という。
【0028】
右前輪用、左前輪用、右後輪用および左後輪用のホイールシリンダ20FR〜20RL付近には、それぞれ対応するホイールシリンダ20に作用する作動液の圧力であるホイールシリンダ圧を検出するホイールシリンダ圧センサ44FR,44FL,44RRおよび44RLが設けられている。以下、適宜、ホイールシリンダ圧センサ44FR〜44RLを総称して「ホイールシリンダ圧センサ44」という。
【0029】
上述の右電磁開閉弁22FRおよび左電磁開閉弁22FL、増圧弁40FR〜40RL、減圧弁42FR〜42RL、オイルポンプ34、アキュムレータ50等は、ブレーキ制御装置10の油圧アクチュエータ81を構成する。そして、かかる油圧アクチュエータ81は、電子制御ユニット(以下「ECU」という)200によって制御される。
【0030】
ECU200は、ホイールシリンダ20FR〜20RLにおけるホイールシリンダ圧を制御する制御手段として機能する。ECU200は、各種演算処理を実行するCPU、各種制御プログラムを格納するROM、データ格納やプログラム実行のためのワークエリアとして利用されるRAM、エンジン停止時にも記憶内容を保持できるバックアップRAM等の不揮発性メモリ、入出力インターフェース、各種センサ等から入力されたアナログ信号をデジタル信号に変換して取り込むためのA/Dコンバータ、計時用のタイマ等を備えるものである。
【0031】
ECU200には、上述の電磁開閉弁22FR,22FL、シミュレータカット弁23、増圧弁40FR〜40RL、減圧弁42FR〜42RL等の油圧アクチュエータ81を含む各種アクチュエータ類が電気的に接続されている。
【0032】
また、ECU200には、制御に用いるための信号を出力する各種センサ・スイッチ類が電気的に接続されている。すなわち、ECU200には、ストロークセンサ46からブレーキペダル12のペダルストロークを示す出力電圧が入力され、マスタシリンダ圧センサ48からマスタシリンダ圧を示す信号が入力され、ストップランプスイッチ47からブレーキランプのON/OFFを示す信号が入力される。
【0033】
このように構成されるブレーキ制御装置10では、運転者によってブレーキペダル12が踏み込まれると、ECU200により、ブレーキペダル12の踏み込み量を表すペダルストロークとマスタシリンダ圧とから車両の目標制動力が算出され、算出された目標制動力に応じて各車輪のホイールシリンダ圧の目標値である目標油圧が求められる。そして、ECU200により増圧弁40、減圧弁42が制御され、各車輪のホイールシリンダ圧が目標油圧になるよう制御される。
【0034】
本実施例においてECU200は、ストロークセンサ46の異常を判定するセンサ異常判定装置としての機能をもつ。ECU200は、ストロークセンサ46の異常を判定すると、ストロークセンサ46の出力電圧を用いたブレーキ制御を停止し、マスタシリンダ圧のみから車両の目標制動力を算出する。以下、ECU200のセンサ異常判定機能について説明する。
【0035】
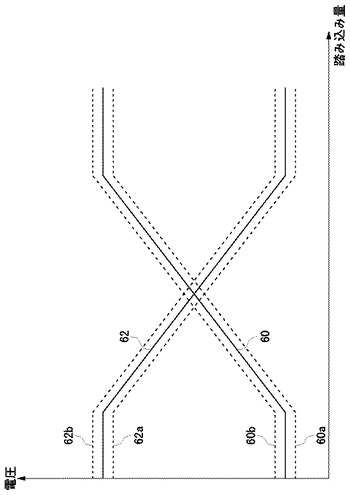
図2は、実施形態に係るブレーキペダル12の踏み込み量とストロークセンサ46の出力電圧の関係を示す。現実のストロークセンサ46は、出力特性にばらつきを含んでいるため、本実施例のセンサ異常判定装置は、特性ばらつきを加味した判定処理を行う。
【0036】
実線60は、第1ストロークセンサ46aの出力電圧の標準値を示す。以下、第1ストロークセンサ46aの出力電圧を「第1出力電圧」と呼ぶこともある。破線60aは、第1出力電圧の下限値を示し、破線60bは、第1出力電圧の上限値を示す。破線60aおよび60bは、第1ストロークセンサ46aの出力特性ばらつきによる下限値および上限値をそれぞれ表現し、正常な第1ストロークセンサ46aの出力電圧は、破線60aおよび60bで表現される範囲内の値をとる。
【0037】
実線62は、第2ストロークセンサ46bの出力電圧の標準値を示す。以下、第2ストロークセンサ46bの出力電圧を「第2出力電圧」と呼ぶこともある。破線62aは、第2出力電圧の下限値を示し、破線62bは、第2出力電圧の上限値を示す。破線62aおよび62bは、第2ストロークセンサ46bの出力特性ばらつきによる下限値および上限値をそれぞれ表現し、正常な第2ストロークセンサ46bの出力電圧は、破線62aおよび62bで表現される範囲内の値をとる。
【0038】
第1ストロークセンサ46aは、ブレーキペダル12の踏み込み量の増加に応じて出力電圧を増加させ、一方、第2ストロークセンサ46bは、ブレーキペダル12の踏み込み量の増加に応じて出力電圧を減少させる。第1ストロークセンサ46aおよび第2ストロークセンサ46bともに、踏み込み量が所定量に達すると、一定の電圧を出力する。第1ストロークセンサ46aの出力電圧と第2ストロークセンサ46bの出力電圧は所定の関係を有しており、ECU200は、一方の電圧から他方の電圧を推定できる。具体的に、第2ストロークセンサ46bの出力電圧Vbは、第1ストロークセンサ46aの出力電圧Vaを反転したものであり、理想的には(Va+Vb)=所定値Aの関係が成立する。
【0039】
ブレーキ制御装置10では、2つの第1ストロークセンサ46aおよび第2ストロークセンサ46bを設けることで、供給電源に一時的にノイズが生じて、それぞれのストロークセンサ46a、46bの出力電圧がノイズの影響を受けたとしても、第2ストロークセンサ46bは第1ストロークセンサ46aの出力電圧を反転して出力するため、ECU200は、それぞれの出力電圧を踏み込み量に換算して平均値を用いることで、そのノイズをキャンセルできる。
【0040】
ここで、実施形態のECU200は、第1出力電圧と第2出力電圧を用いてストロークセンサ46の出力の異常を判定する。具体的にECU200は、第1出力電圧と第2出力電圧との和が所定の範囲から外れれば、第1ストロークセンサ46aおよび/または第2ストロークセンサ46bの出力が異常であると判定し、ストロークセンサ46の出力電圧を用いたブレーキ制御を中止する。一方、ECU200は、第1出力電圧と第2出力電圧との和が、所定値Aを含む所定範囲内にあれば、ストロークセンサ46の出力に異常はないと判定する。
【0041】
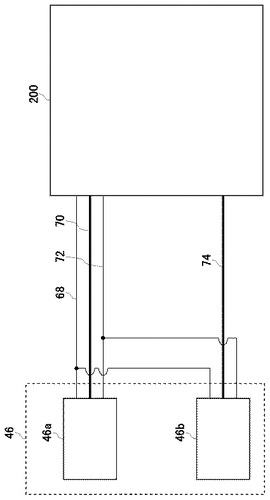
図3は、実施形態に係るストロークセンサ46とECU200の回路構成の模式図である。電源ライン68は、第1ストロークセンサ46aと第2ストロークセンサ46bとをECU200内の電源に接続する。グランドライン72は、第1ストロークセンサ46aと第2ストロークセンサ46bとをECU200内のグランドに接続する。第1信号ライン70は、第1ストロークセンサ46aからECU200に第1出力電圧を供給するための伝送路であり、第2信号ライン74は、第2ストロークセンサ46bからECU200に第2出力電圧を供給するための伝送路である。
【0042】
ECU200には、第1ストロークセンサ46aの出力電圧を監視する第1入力IC(図示せず)と、第2ストロークセンサ46bの出力電圧を監視する第2入力IC(図示せず)とが設けられている。ここで、第1入力ICおよび第2入力ICには、入力される電圧が増大したときの対策として、それぞれ監視可能な電圧の上限(以下、上限監視電圧とよぶ)が設定されており、各入力ICは、上限監視電圧までの電圧しか監視できない。そのため、ストロークセンサ46の出力電圧が上限監視電圧を超えると、入力ICは出力電圧を監視不能となり、監視結果として上限監視電圧を出力する。以下、このような事情のもとで、センサ異常判定装置によるストロークセンサ46の異常判定処理を説明する。
【0043】
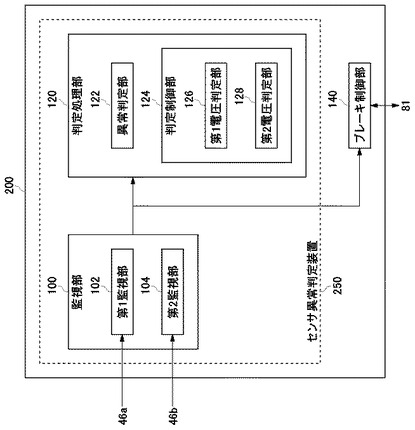
図4は、ECU200によるセンサ異常判定処理の機能ブロックを示す。ECU200は、監視部100、判定処理部120およびブレーキ制御部140を備える。監視部100は、第1ストロークセンサ46aの出力電圧を監視する第1監視部102と、第2ストロークセンサ46bの出力電圧を監視する第2監視部104とを有する。
【0044】
判定処理部120は、異常判定部122および判定制御部124を有する。異常判定部122は、第1監視部102および第2監視部104の監視結果を受け取り、第1ストロークセンサ46aまたは第2ストロークセンサ46bに異常が生じたか否かを判定する。具体的に異常判定部122は、第1監視部102が監視している第1出力電圧と、第2監視部104が監視している第2出力電圧との和を算出し、算出値が所定の範囲から外れれば、第1ストロークセンサ46aおよび/または第2ストロークセンサ46bの異常を判定する。
【0045】
また図3を参照して、第1ストロークセンサ46aおよび第2ストロークセンサ46bは、電源ライン68により共通の電源に接続され、またグランドライン72により共通のグランドに接続されている。仮に、電源ライン68に断線が生じていると、第1ストロークセンサ46aの第1出力電圧と第2ストロークセンサ46bの第2出力電圧はグランドレベルとなり、一方、グランドライン72に断線が生じていると、第1出力電圧と第2出力電圧は電源電圧レベルとなる。そこで、この断線を検出するために、異常判定部122は、第1出力電圧と第2出力電圧の差の絶対値を算出し、算出値が所定の閾値よりも小さければ、断線異常を判定する。
【0046】
判定制御部124は、異常判定部122による判定処理の実行を制御し、具体的には、第1監視部102および第2監視部104の監視結果を受け取り、異常判定部122による判定処理の実行の可否を決定する。判定制御部124は、第1電圧判定部126および第2電圧判定部128を有する。
【0047】
ECU200において、監視部100および判定処理部120が、ストロークセンサ46の異常判定を行うセンサ異常判定装置250として動作する。ブレーキ制御部140は、監視部100による監視結果と、判定処理部120による判定結果を受けて、油圧アクチュエータ81を制御する。判定処理部120により異常のないことが判定されると、ブレーキ制御部140は、監視部100による監視結果に応じて、目標ホイールシリンダ圧を決定して、油圧アクチュエータ81の制御弁の開閉を制御する。一方、判定処理部120により異常のあることが判定されたり、またはセンサ異常判定処理を停止することが決定されると、ブレーキ制御部140は、マスタシリンダ圧センサ48の出力のみからブレーキペダル12の踏み込み量を導出し、導出した踏み込み量から、目標ホイールシリンダ圧を決定する。
【0048】
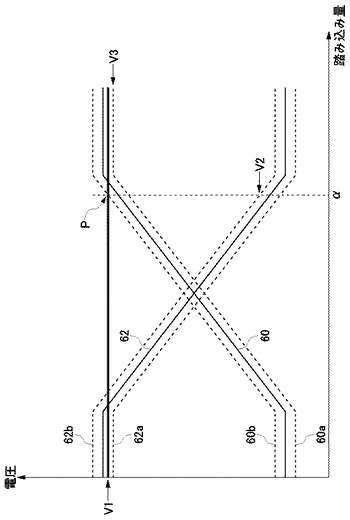
図5は、ストロークセンサ46の出力特性と、監視部100に設定されている上限監視電圧V1との関係を示す。監視部100において、第1監視部102および第2監視部104の上限監視電圧は等しく設定されてもよいが、異なるように設定されてもよい。図5において、少なくとも第1監視部102に上限監視電圧V1が設定されていることを前提とするが、第2監視部104に上限監視電圧V1が設定されていてもよい。
【0049】
本実施例のセンサ異常判定装置250において、第1監視部102は、上限監視電圧V1以上となる電圧を監視することができない。したがって判定制御部124は、第1ストロークセンサ46aの出力特性のばらつきを加味して、第1ストロークセンサ46aの第1出力電圧が上限監視電圧V1以上となる可能性がある場合に、異常判定部122による異常判定処理を停止させる。図5を参照して、第1出力電圧は、破線60aと60bとで挟まれた範囲の値をとりうるが、第1出力電圧が上限監視電圧V1に到達する最小の踏み込み量は、破線60bで示される第1出力電圧の上限値と上限監視電圧V1との交点Pにおける踏み込み量αである。つまり、踏み込み量がα以上となると、第1出力電圧は、上限監視電圧V1以上となる可能性があり、第1監視部102が、第1出力電圧を正確に監視できない状況が発生しうる。そのため判定制御部124は、異常判定部122による異常判定処理を停止させる。
【0050】
本実施例のブレーキ制御装置10において、ストロークセンサ46の異常判定処理を停止すると、ストロークセンサ46に異常が生じているか否かを判断できなくなる。ストロークセンサ46の出力電圧が正常であることを確認できない以上、ブレーキ制御部140は、ストロークセンサ46の出力電圧を利用したブレーキ制御を中止して、マスタシリンダ圧のみを利用したブレーキ制御を行うことになる。
【0051】
判定制御部124において、第1電圧判定部126が、第1ストロークセンサ46aの第1出力電圧が上限監視電圧V1以上となる可能性があるか否かを判定する。このとき第1電圧判定部126は、第1出力電圧と第2出力電圧が所定の関係にあることを利用して、第2監視部104により監視される第2出力電圧から、第1出力電圧が上限監視電圧V1以上となる可能性があるか否かを判定する。図5を参照して、第2出力電圧は、破線62aと62bとで挟まれた範囲の値をとりうるが、踏み込み量αを示す第2出力電圧の最大値は、破線62b上の上限値(V2)である。つまり、第2出力電圧が閾値電圧V2以下となると、第1出力電圧は、上限監視電圧V1以上となる可能性が生じる関係にある。そこで第1電圧判定部126は、第2出力電圧が所定の閾値電圧V2以下になると、第1出力電圧が上限監視電圧V1以上となる可能性があることを判定する。
【0052】
第2ストロークセンサ46bは、閾値電圧V2近傍では電圧を安定して出力できる。第1電圧判定部126は、第2出力電圧を用いることで、第1出力電圧が上限監視電圧V1以上となる可能性があるか否かの判定を確実して実行できるようになる。特に、第1ストロークセンサ46aの上限電圧が上限監視電圧V1よりも低い場合には、第2出力電圧を用いた判定処理が有効である。なお状況によっては第1電圧判定部126が、第1監視部102による監視結果を用いて、第1出力電圧が上限監視電圧V1以上であるか否かの判定を実行してもよい。
【0053】
第1電圧判定部126により第1出力電圧が上限監視電圧V1以上となる可能性がないことが判定されると、判定制御部124は、異常判定部122によるセンサ異常判定処理を実行させる。この状態は、図5において、踏み込み量がαよりも小さい場合であり、第1監視部102は、第1ストロークセンサ46aの第1出力電圧を正確に監視できるため、異常判定部122は、センサ異常判定処理を実行できる。
【0054】
一方、第1電圧判定部126により第1出力電圧が上限監視電圧V1以上となる可能性があることが判定されると、判定制御部124は、異常判定部122によるセンサ異常判定処理を停止させる。この状態は、図5において、踏み込み量がα以上となる場合であり、第1監視部102が、第1ストロークセンサ46aの第1出力電圧を正確に監視できない可能性がある。そこで判定制御部124は、第1出力電圧に実際に異常が生じているか否かにかかわらず、異常判定部122によるセンサ異常判定処理を停止させて、ブレーキ制御の安全性を保つようにしている。
【0055】
以上は、第1ストロークセンサ46aの第1出力電圧を正確に監視できない可能性がある場合に、センサ異常判定処理を停止させる技術を説明した。しかしながら一方で、第1ストロークセンサ46aの第1出力電圧を正確に監視できるのであれば、センサ異常判定処理を実行しつつ、ブレーキ制御部140が、ストロークセンサ46の出力電圧を用いたブレーキ制御を実行できるようにしたい。
【0056】
そこで、判定制御部124における第2電圧判定部128が、第1監視部102により監視される第1出力電圧が所定の上限センサ電圧V3以上であるか否かを判定する。図2に関して説明したように、第1ストロークセンサ46aは、ブレーキペダル12の踏み込み量の増加とともに、出力電圧を増加させ、踏み込み量が所定量に到達すると、そこからは出力電圧を一定とする。このときの出力電圧を「上限センサ電圧」と呼ぶと、図5に示すように、上限センサ電圧の最小値は、第1出力電圧の下限値を示す破線60aにより特定されるV3である。したがって、第1ストロークセンサ46aは、出力特性のばらつきを考慮しても、その出力電圧が上限センサ電圧V3となるまでは、ブレーキペダル12の踏み込み量を正確に検出できる。なお図5の例では、V3<V1の関係が成立している。
【0057】
そこで第2電圧判定部128は、第1監視部102により監視される第1出力電圧が上限センサ電圧V3以上であるか否かを判定し、上限センサ電圧V3よりも小さければ、監視される第1出力電圧が正確にブレーキペダル12の踏み込み量を表現していることを認識する。したがって判定制御部124は、第1出力電圧が上限センサ電圧V3よりも小さいことが判定されると、第1電圧判定部126により第1出力電圧が上限監視電圧V1以上となる可能性があることが判定された場合であっても、異常判定部122による判定処理を実行させる。このように、実際に監視されている第1出力電圧が正確にブレーキペダル12の踏み込み量を検出しているか否かに基づいて、異常判定部122による判定処理の可否を決定することで、適切なセンサ異常判定処理を実行することが可能となる。
【0058】
以上のように、センサ異常判定装置250によると、第2出力電圧と閾値電圧V2の比較により、センサ異常判定処理の実行可否を決定することで、監視部100の入力特性を加味してセンサ異常判定処理を制御することができる。また、センサ異常判定処理の実行可否を決定に際して、第1出力電圧と上限センサ電圧V3の比較結果も加味することで、無用にセンサ異常判定処理を停止することなく、センサ異常判定処理を適切に実行することができる。
【0059】
以上、実施の形態をもとに本発明を説明した。これらの実施形態は例示であり、各構成要素や各処理プロセスの組合せにいろいろな変形例が可能なこと、またそうした変形例も本発明の範囲にあることは当業者に理解されるところである。
【符号の説明】
【0060】
10・・・ブレーキ制御装置、46・・・ストロークセンサ、46a・・・第1ストロークセンサ、46b・・・第2ストロークセンサ、81・・・油圧アクチュエータ、100・・・監視部、102・・・第1監視部、104・・・第2監視部、120・・・判定処理部、122・・・異常判定部、124・・・判定制御部、126・・・第1電圧判定部、128・・・第2電圧判定部、140・・・ブレーキ制御部、200・・・ECU、250・・・センサ異常判定装置。
【技術分野】
【0001】
本発明は、センサ異常判定技術に関し、特に、ブレーキペダルの操作量に応じた電圧を出力する非接触式ストロークセンサの異常を判定する技術に関する。
【背景技術】
【0002】
近年、電子制御によって最適な制動力を発生させる電子制御ブレーキシステムの開発が盛んに進められている。また従来は、ブレーキペダルの踏み込み量を摺動式のストロークセンサで検出することが一般的であったが、最近では、導電部材同士の接触を要しない非接触式のストロークセンサの開発も進められている。
【0003】
電子制御ブレーキシステムは、ブレーキペダルの踏み込み量およびマスタシリンダ圧に基づいて目標制動力を導出し、各車輪に与える目標ホイールシリンダ圧を算出する。しかしながら、ストロークセンサに異常が生じると、ブレーキ制御は、ストロークセンサの検出値を用いず、マスタシリンダ圧のみを用いて行われるようになる。特許文献1は、操作されていないときのブレーキペダルの位置に対してゼロ点補正を実行し、ゼロ点補正の実行直後に検出された検出値を利用して、異常判定を行うセンサ異常判定装置を開示する。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2010−36626号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
センサ異常判定装置は、ブレーキペダルに設けられた2つのストロークセンサの出力電圧がともに同じ踏み込み量を示していない場合に、ストロークセンサの異常を判定する。センサ異常判定装置は、ストロークセンサの出力電圧を監視する入力IC(Inetgrated Cicuit)を有しているが、センサの出力特性と入力ICの入力特性が互いに独立している場合には、電圧の使用範囲が異なるために、適切な異常判定を行うことが容易でないという問題がある。また、センサ異常判定装置がストロークセンサの異常を判定すると、ブレーキ制御にストロークセンサの検出値を用いることができなくなるため、異常が発生していないにも関わらず異常であると判定することは、適切なブレーキ制御を行うためにも極力避けることが好ましい。
【0006】
本発明はこうした状況に鑑みてなされたものであり、その目的は、2つのストロークセンサの出力電圧を利用するブレーキ制御装置において、ストロークセンサの異常を適切に判定できるセンサ異常判定技術を提供することにある。
【課題を解決するための手段】
【0007】
上記課題を解決するために、本発明のある態様のセンサ異常判定装置は、非接触式の第1ストロークセンサの第1出力電圧を監視する第1監視手段と、非接触式の第2ストロークセンサの第2出力電圧を監視する第2監視手段と、第1監視手段および第2監視手段の監視結果を受け取り、第1ストロークセンサまたは第2ストロークセンサに異常が生じたか否かを判定する異常判定手段と、異常判定手段による判定処理の実行を制御する判定制御手段とを備える。第1監視手段には、監視可能な上限監視電圧が設定されている。判定制御手段は、第1ストロークセンサの第1出力電圧が上限監視電圧以上となる可能性があるか否かを判定する第1電圧判定手段を有する。判定制御手段は、第1電圧判定手段により第1出力電圧が上限監視電圧以上となる可能性がないことが判定されると、異常判定手段による判定処理を実行させ、第1電圧判定手段により第1出力電圧が上限監視電圧以上となる可能性があることが判定されると、異常判定手段による判定処理を停止させる。
【0008】
この態様によると、第1ストロークセンサの第1出力電圧が上限監視電圧以上となる可能性がある場合に、異常判定手段による判定処理を停止させることで、第1監視手段の入力特性を加味したセンサ異常判定処理を実現できる。
【0009】
第1出力電圧と第2出力電圧は所定の関係にあり、第1電圧判定手段は、第2監視手段により監視される第2出力電圧から、第1出力電圧が上限監視電圧以上となる可能性があるか否かを判定してもよい。ここで所定の関係とは、センサ正常時に、一方の電圧から他方の電圧が導出できる関係をいう。第2出力電圧を用いることで、第1出力電圧が上限監視電圧以上となる可能性があるか否かの判定を、安定して実行することが可能となる。
【0010】
第1ストロークセンサは、ブレーキペダルの踏み込み量の増加に応じて第1出力電圧を増加し、第2ストロークセンサは、ブレーキペダルの踏み込み量の増加に応じて第2出力電圧を減少するものであって、第1電圧判定手段は、第2出力電圧が所定の閾値電圧以下になると、第1出力電圧が上限監視電圧以上となる可能性があることを判定してもよい。
【0011】
判定制御手段は、第1監視手段により監視される第1出力電圧が所定の上限センサ電圧以上であるか否かを判定する第2電圧判定手段を有してもよい。判定制御手段は、第2電圧判定手段により第1出力電圧が上限センサ電圧よりも小さいことが判定されると、第1電圧判定手段により第1出力電圧が上限監視電圧以上となる可能性があることが判定された場合であっても、異常判定手段による判定処理を実行させてもよい。これによると、実際に監視された第1出力電圧が上限センサ電圧よりも小さければ、異常判定処理による判定処理を停止させることなく、実行させることで、センサ異常の有無を適切に判定することができる。なお判定制御手段は、第2電圧判定手段により第1出力電圧が上限センサ電圧以上であることが判定されると、異常判定手段による判定処理を停止させる。
【発明の効果】
【0012】
本発明によれば、2つのストロークセンサの出力電圧を利用するブレーキ制御装置において、ストロークセンサの異常を適切に判定できるセンサ異常判定技術を提供することにある。
【図面の簡単な説明】
【0013】
【図1】実施形態に係るブレーキ制御装置の構成を示す図である。
【図2】実施形態に係るブレーキペダルの踏み込み量とストロークセンサの出力電圧の関係を示す図である。
【図3】実施形態に係るストロークセンサとECUの回路構成の模式図である。
【図4】ECUによるセンサ異常判定処理の機能ブロックを示す図である。
【図5】ストロークセンサの出力特性と、監視部に設定されている上限監視電圧Vとの関係を示す図である。
【発明を実施するための形態】
【0014】
図1は、実施形態に係るブレーキ制御装置の構成を示す図である。図1に示すブレーキ制御装置10は、車両用の電子制御式ブレーキシステム(ECB)を構成しており、運転者によるブレーキ操作部材としてのブレーキペダル12の操作量にもとづいて車両の4輪のブレーキを最適に制御するものである。
【0015】
ブレーキペダル12は、運転者による踏み込み量に応じて作動液を送り出すマスタシリンダ14に接続されている。ブレーキペダル12には、その踏み込み量を検出するための第1ストロークセンサ46aと第2ストロークセンサ46b(以下、総称する場合は「ストロークセンサ46」という)が設けられている。
【0016】
実施形態に係るストロークセンサ46は、非接触式のホールIC型の磁気センサである。第1ストロークセンサ46aおよび第2ストロークセンサ46bは、ともにブレーキペダル12の回転軸に設けられる。第1ストロークセンサ46aおよび第2ストロークセンサ46bは、図示しない共通の電源から電力を供給される。ストロークセンサ46は、ホールICの回路において検出した値に温度補正等を施してECU200に出力する。
【0017】
ストップランプスイッチ47は、ブレーキペダル12の踏み込みの有無を検出する。ストップランプスイッチ47は、車両の後方に設けられるブレーキランプの点灯制御に用いられる。たとえば、運転者によりブレーキペダル12が踏み込まれると、ストップランプスイッチ47がONされて、ブレーキランプが点灯し、ブレーキペダル12の踏み込みが解除されると、ストップランプスイッチ47がOFFされて、ブレーキランプが消灯する。
【0018】
マスタシリンダ14の第1出力ポート14aには、運転者によるブレーキペダル12の踏力に応じたペダルストロークを創出するストロークシミュレータ24が接続されている。
【0019】
マスタシリンダ14とストロークシミュレータ24とを接続する流路の中途には、シミュレータカット弁23が設けられている。シミュレータカット弁23は、通電することにより開弁し、非通電時に閉弁する常閉型の電磁開閉弁である。また、マスタシリンダ14には、作動液を貯留するためのリザーバタンク26が接続されている。
【0020】
マスタシリンダ14の第1出力ポート14aには、右前輪用のブレーキ油圧制御管18が接続されており、ブレーキ油圧制御管18は、右前輪に対して制動力を付与する右前輪用のホイールシリンダ20FRに接続されている。また、マスタシリンダ14の第2出力ポート14bには、左前輪用のブレーキ油圧制御管16が接続されており、ブレーキ油圧制御管16は、左前輪に対して制動力を付与する左前輪用のホイールシリンダ20FLに接続されている。
【0021】
右前輪用のブレーキ油圧制御管18の中途には、右電磁開閉弁22FRが設けられており、左前輪用のブレーキ油圧制御管16の中途には、左電磁開閉弁22FLが設けられている。これらの右電磁開閉弁22FRおよび左電磁開閉弁22FLは、何れも、非通電時に開状態にあり、通電時に閉状態に切り換えられる常開型電磁弁である。
【0022】
また、右前輪用のブレーキ油圧制御管18の中途には、右前輪側のマスタシリンダ圧を検出する右マスタシリンダ圧センサ48FRが設けられており、左前輪用のブレーキ油圧制御管16の中途には、左前輪側のマスタシリンダ圧を計測する左マスタシリンダ圧センサ48FLが設けられている。なお、以下では適宜、右マスタシリンダ圧センサ48FRおよび左マスタシリンダ圧センサ48FLを総称して、「マスタシリンダ圧センサ48」という。
【0023】
ブレーキ制御装置10では、運転者によってブレーキペダル12が踏み込まれた際、ストロークセンサ46によりその踏み込み量が検出されるが、これらの右マスタシリンダ圧センサ48FRおよび左マスタシリンダ圧センサ48FLによって検出されるマスタシリンダ圧からもブレーキペダル12の踏み込み操作力(踏力)を求めることができる。
【0024】
一方、リザーバタンク26には、油圧給排管28の一端が接続されており、この油圧給排管28の中途には、モータ32により駆動されるオイルポンプ34の吸込口が接続されている。オイルポンプ34の吐出口は、高圧管30に接続されており、この高圧管30には、アキュムレータ50とリリーフバルブ53とが接続されている。本実施形態では、オイルポンプ34として、モータ32によってそれぞれ往復移動させられる2体以上のピストン(図示せず)を備えた往復動ポンプが採用される。また、アキュムレータ50としては、作動液の圧力エネルギを窒素等の封入ガスの圧力エネルギに変換して蓄えるものが採用される。
【0025】
アキュムレータ50は、オイルポンプ34によって例えば14〜22MPa程度にまで昇圧された作動液を蓄える。リリーフバルブ53の弁出口は、油圧給排管28に接続されており、アキュムレータ50における作動液の圧力が異常に高まって例えば25MPa程度になると、リリーフバルブ53が開弁し、高圧の作動液は油圧給排管28へと戻される。さらに、高圧管30には、アキュムレータ50の出口圧力、すなわち、アキュムレータ50における作動液の圧力を検出するアキュムレータ圧センサ51が設けられている。
【0026】
そして、高圧管30は、増圧弁40FR、40FL、40RR、40RLを介して右前輪用のホイールシリンダ20FR、左前輪用のホイールシリンダ20FL、右後輪用のホイールシリンダ20RRおよび左後輪用のホイールシリンダ20RLに接続されている。以下、適宜、ホイールシリンダ20FR〜20RLを総称して「ホイールシリンダ20」といい、適宜、増圧弁40FR〜40RLを総称して「増圧弁40」という。増圧弁40は、何れも、非通電時は閉じた状態にあり、必要に応じてホイールシリンダ20の増圧に利用される常閉型の電磁流量制御弁(リニア弁)である。なお、図示されない車両の各車輪に対しては、ディスクブレーキユニットが設けられており、各ディスクブレーキユニットは、ホイールシリンダ20の作用によってブレーキパッドをディスクに押し付けることで制動力を発生する。
【0027】
また、右前輪用のホイールシリンダ20FRと左前輪用のホイールシリンダ20FLとは、それぞれ減圧弁42FRまたは42FLを介して油圧給排管28に接続されている。減圧弁42FRおよび42FLは、必要に応じてホイールシリンダ20FR,20FLの減圧に利用される常閉型の電磁流量制御弁(リニア弁)である。一方、右後輪用のホイールシリンダ20RRと左後輪用のホイールシリンダ20RLとは、常開型の電磁流量制御弁である減圧弁42RRまたは42RLを介して油圧給排管28に接続されている。以下、適宜、減圧弁42FR〜42RLを総称して「減圧弁42」という。
【0028】
右前輪用、左前輪用、右後輪用および左後輪用のホイールシリンダ20FR〜20RL付近には、それぞれ対応するホイールシリンダ20に作用する作動液の圧力であるホイールシリンダ圧を検出するホイールシリンダ圧センサ44FR,44FL,44RRおよび44RLが設けられている。以下、適宜、ホイールシリンダ圧センサ44FR〜44RLを総称して「ホイールシリンダ圧センサ44」という。
【0029】
上述の右電磁開閉弁22FRおよび左電磁開閉弁22FL、増圧弁40FR〜40RL、減圧弁42FR〜42RL、オイルポンプ34、アキュムレータ50等は、ブレーキ制御装置10の油圧アクチュエータ81を構成する。そして、かかる油圧アクチュエータ81は、電子制御ユニット(以下「ECU」という)200によって制御される。
【0030】
ECU200は、ホイールシリンダ20FR〜20RLにおけるホイールシリンダ圧を制御する制御手段として機能する。ECU200は、各種演算処理を実行するCPU、各種制御プログラムを格納するROM、データ格納やプログラム実行のためのワークエリアとして利用されるRAM、エンジン停止時にも記憶内容を保持できるバックアップRAM等の不揮発性メモリ、入出力インターフェース、各種センサ等から入力されたアナログ信号をデジタル信号に変換して取り込むためのA/Dコンバータ、計時用のタイマ等を備えるものである。
【0031】
ECU200には、上述の電磁開閉弁22FR,22FL、シミュレータカット弁23、増圧弁40FR〜40RL、減圧弁42FR〜42RL等の油圧アクチュエータ81を含む各種アクチュエータ類が電気的に接続されている。
【0032】
また、ECU200には、制御に用いるための信号を出力する各種センサ・スイッチ類が電気的に接続されている。すなわち、ECU200には、ストロークセンサ46からブレーキペダル12のペダルストロークを示す出力電圧が入力され、マスタシリンダ圧センサ48からマスタシリンダ圧を示す信号が入力され、ストップランプスイッチ47からブレーキランプのON/OFFを示す信号が入力される。
【0033】
このように構成されるブレーキ制御装置10では、運転者によってブレーキペダル12が踏み込まれると、ECU200により、ブレーキペダル12の踏み込み量を表すペダルストロークとマスタシリンダ圧とから車両の目標制動力が算出され、算出された目標制動力に応じて各車輪のホイールシリンダ圧の目標値である目標油圧が求められる。そして、ECU200により増圧弁40、減圧弁42が制御され、各車輪のホイールシリンダ圧が目標油圧になるよう制御される。
【0034】
本実施例においてECU200は、ストロークセンサ46の異常を判定するセンサ異常判定装置としての機能をもつ。ECU200は、ストロークセンサ46の異常を判定すると、ストロークセンサ46の出力電圧を用いたブレーキ制御を停止し、マスタシリンダ圧のみから車両の目標制動力を算出する。以下、ECU200のセンサ異常判定機能について説明する。
【0035】
図2は、実施形態に係るブレーキペダル12の踏み込み量とストロークセンサ46の出力電圧の関係を示す。現実のストロークセンサ46は、出力特性にばらつきを含んでいるため、本実施例のセンサ異常判定装置は、特性ばらつきを加味した判定処理を行う。
【0036】
実線60は、第1ストロークセンサ46aの出力電圧の標準値を示す。以下、第1ストロークセンサ46aの出力電圧を「第1出力電圧」と呼ぶこともある。破線60aは、第1出力電圧の下限値を示し、破線60bは、第1出力電圧の上限値を示す。破線60aおよび60bは、第1ストロークセンサ46aの出力特性ばらつきによる下限値および上限値をそれぞれ表現し、正常な第1ストロークセンサ46aの出力電圧は、破線60aおよび60bで表現される範囲内の値をとる。
【0037】
実線62は、第2ストロークセンサ46bの出力電圧の標準値を示す。以下、第2ストロークセンサ46bの出力電圧を「第2出力電圧」と呼ぶこともある。破線62aは、第2出力電圧の下限値を示し、破線62bは、第2出力電圧の上限値を示す。破線62aおよび62bは、第2ストロークセンサ46bの出力特性ばらつきによる下限値および上限値をそれぞれ表現し、正常な第2ストロークセンサ46bの出力電圧は、破線62aおよび62bで表現される範囲内の値をとる。
【0038】
第1ストロークセンサ46aは、ブレーキペダル12の踏み込み量の増加に応じて出力電圧を増加させ、一方、第2ストロークセンサ46bは、ブレーキペダル12の踏み込み量の増加に応じて出力電圧を減少させる。第1ストロークセンサ46aおよび第2ストロークセンサ46bともに、踏み込み量が所定量に達すると、一定の電圧を出力する。第1ストロークセンサ46aの出力電圧と第2ストロークセンサ46bの出力電圧は所定の関係を有しており、ECU200は、一方の電圧から他方の電圧を推定できる。具体的に、第2ストロークセンサ46bの出力電圧Vbは、第1ストロークセンサ46aの出力電圧Vaを反転したものであり、理想的には(Va+Vb)=所定値Aの関係が成立する。
【0039】
ブレーキ制御装置10では、2つの第1ストロークセンサ46aおよび第2ストロークセンサ46bを設けることで、供給電源に一時的にノイズが生じて、それぞれのストロークセンサ46a、46bの出力電圧がノイズの影響を受けたとしても、第2ストロークセンサ46bは第1ストロークセンサ46aの出力電圧を反転して出力するため、ECU200は、それぞれの出力電圧を踏み込み量に換算して平均値を用いることで、そのノイズをキャンセルできる。
【0040】
ここで、実施形態のECU200は、第1出力電圧と第2出力電圧を用いてストロークセンサ46の出力の異常を判定する。具体的にECU200は、第1出力電圧と第2出力電圧との和が所定の範囲から外れれば、第1ストロークセンサ46aおよび/または第2ストロークセンサ46bの出力が異常であると判定し、ストロークセンサ46の出力電圧を用いたブレーキ制御を中止する。一方、ECU200は、第1出力電圧と第2出力電圧との和が、所定値Aを含む所定範囲内にあれば、ストロークセンサ46の出力に異常はないと判定する。
【0041】
図3は、実施形態に係るストロークセンサ46とECU200の回路構成の模式図である。電源ライン68は、第1ストロークセンサ46aと第2ストロークセンサ46bとをECU200内の電源に接続する。グランドライン72は、第1ストロークセンサ46aと第2ストロークセンサ46bとをECU200内のグランドに接続する。第1信号ライン70は、第1ストロークセンサ46aからECU200に第1出力電圧を供給するための伝送路であり、第2信号ライン74は、第2ストロークセンサ46bからECU200に第2出力電圧を供給するための伝送路である。
【0042】
ECU200には、第1ストロークセンサ46aの出力電圧を監視する第1入力IC(図示せず)と、第2ストロークセンサ46bの出力電圧を監視する第2入力IC(図示せず)とが設けられている。ここで、第1入力ICおよび第2入力ICには、入力される電圧が増大したときの対策として、それぞれ監視可能な電圧の上限(以下、上限監視電圧とよぶ)が設定されており、各入力ICは、上限監視電圧までの電圧しか監視できない。そのため、ストロークセンサ46の出力電圧が上限監視電圧を超えると、入力ICは出力電圧を監視不能となり、監視結果として上限監視電圧を出力する。以下、このような事情のもとで、センサ異常判定装置によるストロークセンサ46の異常判定処理を説明する。
【0043】
図4は、ECU200によるセンサ異常判定処理の機能ブロックを示す。ECU200は、監視部100、判定処理部120およびブレーキ制御部140を備える。監視部100は、第1ストロークセンサ46aの出力電圧を監視する第1監視部102と、第2ストロークセンサ46bの出力電圧を監視する第2監視部104とを有する。
【0044】
判定処理部120は、異常判定部122および判定制御部124を有する。異常判定部122は、第1監視部102および第2監視部104の監視結果を受け取り、第1ストロークセンサ46aまたは第2ストロークセンサ46bに異常が生じたか否かを判定する。具体的に異常判定部122は、第1監視部102が監視している第1出力電圧と、第2監視部104が監視している第2出力電圧との和を算出し、算出値が所定の範囲から外れれば、第1ストロークセンサ46aおよび/または第2ストロークセンサ46bの異常を判定する。
【0045】
また図3を参照して、第1ストロークセンサ46aおよび第2ストロークセンサ46bは、電源ライン68により共通の電源に接続され、またグランドライン72により共通のグランドに接続されている。仮に、電源ライン68に断線が生じていると、第1ストロークセンサ46aの第1出力電圧と第2ストロークセンサ46bの第2出力電圧はグランドレベルとなり、一方、グランドライン72に断線が生じていると、第1出力電圧と第2出力電圧は電源電圧レベルとなる。そこで、この断線を検出するために、異常判定部122は、第1出力電圧と第2出力電圧の差の絶対値を算出し、算出値が所定の閾値よりも小さければ、断線異常を判定する。
【0046】
判定制御部124は、異常判定部122による判定処理の実行を制御し、具体的には、第1監視部102および第2監視部104の監視結果を受け取り、異常判定部122による判定処理の実行の可否を決定する。判定制御部124は、第1電圧判定部126および第2電圧判定部128を有する。
【0047】
ECU200において、監視部100および判定処理部120が、ストロークセンサ46の異常判定を行うセンサ異常判定装置250として動作する。ブレーキ制御部140は、監視部100による監視結果と、判定処理部120による判定結果を受けて、油圧アクチュエータ81を制御する。判定処理部120により異常のないことが判定されると、ブレーキ制御部140は、監視部100による監視結果に応じて、目標ホイールシリンダ圧を決定して、油圧アクチュエータ81の制御弁の開閉を制御する。一方、判定処理部120により異常のあることが判定されたり、またはセンサ異常判定処理を停止することが決定されると、ブレーキ制御部140は、マスタシリンダ圧センサ48の出力のみからブレーキペダル12の踏み込み量を導出し、導出した踏み込み量から、目標ホイールシリンダ圧を決定する。
【0048】
図5は、ストロークセンサ46の出力特性と、監視部100に設定されている上限監視電圧V1との関係を示す。監視部100において、第1監視部102および第2監視部104の上限監視電圧は等しく設定されてもよいが、異なるように設定されてもよい。図5において、少なくとも第1監視部102に上限監視電圧V1が設定されていることを前提とするが、第2監視部104に上限監視電圧V1が設定されていてもよい。
【0049】
本実施例のセンサ異常判定装置250において、第1監視部102は、上限監視電圧V1以上となる電圧を監視することができない。したがって判定制御部124は、第1ストロークセンサ46aの出力特性のばらつきを加味して、第1ストロークセンサ46aの第1出力電圧が上限監視電圧V1以上となる可能性がある場合に、異常判定部122による異常判定処理を停止させる。図5を参照して、第1出力電圧は、破線60aと60bとで挟まれた範囲の値をとりうるが、第1出力電圧が上限監視電圧V1に到達する最小の踏み込み量は、破線60bで示される第1出力電圧の上限値と上限監視電圧V1との交点Pにおける踏み込み量αである。つまり、踏み込み量がα以上となると、第1出力電圧は、上限監視電圧V1以上となる可能性があり、第1監視部102が、第1出力電圧を正確に監視できない状況が発生しうる。そのため判定制御部124は、異常判定部122による異常判定処理を停止させる。
【0050】
本実施例のブレーキ制御装置10において、ストロークセンサ46の異常判定処理を停止すると、ストロークセンサ46に異常が生じているか否かを判断できなくなる。ストロークセンサ46の出力電圧が正常であることを確認できない以上、ブレーキ制御部140は、ストロークセンサ46の出力電圧を利用したブレーキ制御を中止して、マスタシリンダ圧のみを利用したブレーキ制御を行うことになる。
【0051】
判定制御部124において、第1電圧判定部126が、第1ストロークセンサ46aの第1出力電圧が上限監視電圧V1以上となる可能性があるか否かを判定する。このとき第1電圧判定部126は、第1出力電圧と第2出力電圧が所定の関係にあることを利用して、第2監視部104により監視される第2出力電圧から、第1出力電圧が上限監視電圧V1以上となる可能性があるか否かを判定する。図5を参照して、第2出力電圧は、破線62aと62bとで挟まれた範囲の値をとりうるが、踏み込み量αを示す第2出力電圧の最大値は、破線62b上の上限値(V2)である。つまり、第2出力電圧が閾値電圧V2以下となると、第1出力電圧は、上限監視電圧V1以上となる可能性が生じる関係にある。そこで第1電圧判定部126は、第2出力電圧が所定の閾値電圧V2以下になると、第1出力電圧が上限監視電圧V1以上となる可能性があることを判定する。
【0052】
第2ストロークセンサ46bは、閾値電圧V2近傍では電圧を安定して出力できる。第1電圧判定部126は、第2出力電圧を用いることで、第1出力電圧が上限監視電圧V1以上となる可能性があるか否かの判定を確実して実行できるようになる。特に、第1ストロークセンサ46aの上限電圧が上限監視電圧V1よりも低い場合には、第2出力電圧を用いた判定処理が有効である。なお状況によっては第1電圧判定部126が、第1監視部102による監視結果を用いて、第1出力電圧が上限監視電圧V1以上であるか否かの判定を実行してもよい。
【0053】
第1電圧判定部126により第1出力電圧が上限監視電圧V1以上となる可能性がないことが判定されると、判定制御部124は、異常判定部122によるセンサ異常判定処理を実行させる。この状態は、図5において、踏み込み量がαよりも小さい場合であり、第1監視部102は、第1ストロークセンサ46aの第1出力電圧を正確に監視できるため、異常判定部122は、センサ異常判定処理を実行できる。
【0054】
一方、第1電圧判定部126により第1出力電圧が上限監視電圧V1以上となる可能性があることが判定されると、判定制御部124は、異常判定部122によるセンサ異常判定処理を停止させる。この状態は、図5において、踏み込み量がα以上となる場合であり、第1監視部102が、第1ストロークセンサ46aの第1出力電圧を正確に監視できない可能性がある。そこで判定制御部124は、第1出力電圧に実際に異常が生じているか否かにかかわらず、異常判定部122によるセンサ異常判定処理を停止させて、ブレーキ制御の安全性を保つようにしている。
【0055】
以上は、第1ストロークセンサ46aの第1出力電圧を正確に監視できない可能性がある場合に、センサ異常判定処理を停止させる技術を説明した。しかしながら一方で、第1ストロークセンサ46aの第1出力電圧を正確に監視できるのであれば、センサ異常判定処理を実行しつつ、ブレーキ制御部140が、ストロークセンサ46の出力電圧を用いたブレーキ制御を実行できるようにしたい。
【0056】
そこで、判定制御部124における第2電圧判定部128が、第1監視部102により監視される第1出力電圧が所定の上限センサ電圧V3以上であるか否かを判定する。図2に関して説明したように、第1ストロークセンサ46aは、ブレーキペダル12の踏み込み量の増加とともに、出力電圧を増加させ、踏み込み量が所定量に到達すると、そこからは出力電圧を一定とする。このときの出力電圧を「上限センサ電圧」と呼ぶと、図5に示すように、上限センサ電圧の最小値は、第1出力電圧の下限値を示す破線60aにより特定されるV3である。したがって、第1ストロークセンサ46aは、出力特性のばらつきを考慮しても、その出力電圧が上限センサ電圧V3となるまでは、ブレーキペダル12の踏み込み量を正確に検出できる。なお図5の例では、V3<V1の関係が成立している。
【0057】
そこで第2電圧判定部128は、第1監視部102により監視される第1出力電圧が上限センサ電圧V3以上であるか否かを判定し、上限センサ電圧V3よりも小さければ、監視される第1出力電圧が正確にブレーキペダル12の踏み込み量を表現していることを認識する。したがって判定制御部124は、第1出力電圧が上限センサ電圧V3よりも小さいことが判定されると、第1電圧判定部126により第1出力電圧が上限監視電圧V1以上となる可能性があることが判定された場合であっても、異常判定部122による判定処理を実行させる。このように、実際に監視されている第1出力電圧が正確にブレーキペダル12の踏み込み量を検出しているか否かに基づいて、異常判定部122による判定処理の可否を決定することで、適切なセンサ異常判定処理を実行することが可能となる。
【0058】
以上のように、センサ異常判定装置250によると、第2出力電圧と閾値電圧V2の比較により、センサ異常判定処理の実行可否を決定することで、監視部100の入力特性を加味してセンサ異常判定処理を制御することができる。また、センサ異常判定処理の実行可否を決定に際して、第1出力電圧と上限センサ電圧V3の比較結果も加味することで、無用にセンサ異常判定処理を停止することなく、センサ異常判定処理を適切に実行することができる。
【0059】
以上、実施の形態をもとに本発明を説明した。これらの実施形態は例示であり、各構成要素や各処理プロセスの組合せにいろいろな変形例が可能なこと、またそうした変形例も本発明の範囲にあることは当業者に理解されるところである。
【符号の説明】
【0060】
10・・・ブレーキ制御装置、46・・・ストロークセンサ、46a・・・第1ストロークセンサ、46b・・・第2ストロークセンサ、81・・・油圧アクチュエータ、100・・・監視部、102・・・第1監視部、104・・・第2監視部、120・・・判定処理部、122・・・異常判定部、124・・・判定制御部、126・・・第1電圧判定部、128・・・第2電圧判定部、140・・・ブレーキ制御部、200・・・ECU、250・・・センサ異常判定装置。
【特許請求の範囲】
【請求項1】
非接触式の第1ストロークセンサの第1出力電圧を監視する第1監視手段と、
非接触式の第2ストロークセンサの第2出力電圧を監視する第2監視手段と、
前記第1監視手段および前記第2監視手段の監視結果を受け取り、前記第1ストロークセンサまたは前記第2ストロークセンサに異常が生じたか否かを判定する異常判定手段と、
前記異常判定手段による判定処理の実行を制御する判定制御手段と、
を備えたセンサ異常判定装置であって、前記第1監視手段には、監視可能な上限監視電圧が設定されており、
前記判定制御手段は、前記第1ストロークセンサの第1出力電圧が上限監視電圧以上となる可能性があるか否かを判定する第1電圧判定手段を有し、
前記判定制御手段は、前記第1電圧判定手段により第1出力電圧が上限監視電圧以上となる可能性がないことが判定されると、前記異常判定手段による判定処理を実行させ、前記第1電圧判定手段により第1出力電圧が上限監視電圧以上となる可能性があることが判定されると、前記異常判定手段による判定処理を停止させることを特徴とするセンサ異常判定装置。
【請求項2】
第1出力電圧と第2出力電圧は所定の関係にあり、
前記第1電圧判定手段は、前記第2監視手段により監視される第2出力電圧から、第1出力電圧が上限監視電圧以上となる可能性があるか否かを判定することを特徴とする請求項1に記載のセンサ異常判定装置。
【請求項3】
前記第1ストロークセンサは、ブレーキペダルの踏み込み量の増加に応じて第1出力電圧を増加し、前記第2ストロークセンサは、ブレーキペダルの踏み込み量の増加に応じて第2出力電圧を減少するものであって、
前記第1電圧判定手段は、第2出力電圧が所定の閾値電圧以下になると、第1出力電圧が上限監視電圧以上となる可能性があることを判定することを特徴とする請求項2に記載のセンサ異常判定装置。
【請求項4】
前記判定制御手段は、前記第1監視手段により監視される第1出力電圧が所定の上限センサ電圧以上であるか否かを判定する第2電圧判定手段を有し、
前記判定制御手段は、前記第2電圧判定手段により第1出力電圧が上限センサ電圧よりも小さいことが判定されると、前記第1電圧判定手段により第1出力電圧が上限監視電圧以上となる可能性があることが判定された場合であっても、前記異常判定手段による判定処理を実行させることを特徴とする請求項1から3のいずれかに記載のセンサ異常判定装置。
【請求項1】
非接触式の第1ストロークセンサの第1出力電圧を監視する第1監視手段と、
非接触式の第2ストロークセンサの第2出力電圧を監視する第2監視手段と、
前記第1監視手段および前記第2監視手段の監視結果を受け取り、前記第1ストロークセンサまたは前記第2ストロークセンサに異常が生じたか否かを判定する異常判定手段と、
前記異常判定手段による判定処理の実行を制御する判定制御手段と、
を備えたセンサ異常判定装置であって、前記第1監視手段には、監視可能な上限監視電圧が設定されており、
前記判定制御手段は、前記第1ストロークセンサの第1出力電圧が上限監視電圧以上となる可能性があるか否かを判定する第1電圧判定手段を有し、
前記判定制御手段は、前記第1電圧判定手段により第1出力電圧が上限監視電圧以上となる可能性がないことが判定されると、前記異常判定手段による判定処理を実行させ、前記第1電圧判定手段により第1出力電圧が上限監視電圧以上となる可能性があることが判定されると、前記異常判定手段による判定処理を停止させることを特徴とするセンサ異常判定装置。
【請求項2】
第1出力電圧と第2出力電圧は所定の関係にあり、
前記第1電圧判定手段は、前記第2監視手段により監視される第2出力電圧から、第1出力電圧が上限監視電圧以上となる可能性があるか否かを判定することを特徴とする請求項1に記載のセンサ異常判定装置。
【請求項3】
前記第1ストロークセンサは、ブレーキペダルの踏み込み量の増加に応じて第1出力電圧を増加し、前記第2ストロークセンサは、ブレーキペダルの踏み込み量の増加に応じて第2出力電圧を減少するものであって、
前記第1電圧判定手段は、第2出力電圧が所定の閾値電圧以下になると、第1出力電圧が上限監視電圧以上となる可能性があることを判定することを特徴とする請求項2に記載のセンサ異常判定装置。
【請求項4】
前記判定制御手段は、前記第1監視手段により監視される第1出力電圧が所定の上限センサ電圧以上であるか否かを判定する第2電圧判定手段を有し、
前記判定制御手段は、前記第2電圧判定手段により第1出力電圧が上限センサ電圧よりも小さいことが判定されると、前記第1電圧判定手段により第1出力電圧が上限監視電圧以上となる可能性があることが判定された場合であっても、前記異常判定手段による判定処理を実行させることを特徴とする請求項1から3のいずれかに記載のセンサ異常判定装置。
【図1】



【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2012−108029(P2012−108029A)
【公開日】平成24年6月7日(2012.6.7)
【国際特許分類】
【出願番号】特願2010−257755(P2010−257755)
【出願日】平成22年11月18日(2010.11.18)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成24年6月7日(2012.6.7)
【国際特許分類】
【出願日】平成22年11月18日(2010.11.18)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]