
Fターム[3D246MA08]の内容
ブレーキシステム(制動力調整) (55,256) | 安全装置 (1,468) | 故障検知 (454) | 故障検知対象 (316) | 電気系 (182) | センサ (71)
Fターム[3D246MA08]に分類される特許
1 - 20 / 71
車両挙動制御装置
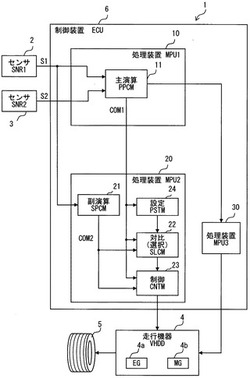
【課題】主処理装置が異常になっても、車両の挙動を安定的に制御する。
【解決手段】第1の処理装置10は、車両の利用者からの要求を入力する要求入力センサ2を含む複数のセンサ2、3からの複数の信号を含む第1の情報に基づいて、第1の制御量COM1を演算する。第2の処理装置20は、要求入力センサ2からの信号を含むが、第1の情報より情報量が少ない第2の情報に基づいて、第2の制御量COM2を演算する。第2の処置装置20は、第1の制御量COM1が第2の制御量COM2から許容範囲TH内であると判定されるとき、第1の制御量COM1に基づいて走行機器4を制御する。第2の処置装置20は、第1の制御量COM1が第2の制御量COM2から許容範囲TH外であると判定されるとき、車両の運動量が小さくなる制御量、または車両の運動量の変化が小さい制御量に基づいて走行機器4を制御する。
(もっと読む)
車輪回転速度制御装置

【課題】車両の停車時に発生する車輪回転速度センサからの誤信号を防止する車輪回転速度制御装置を提供する。
【解決手段】4輪の車輪を備える車両の各車輪それぞれの車輪回転速度を検出する車輪回転速度検出手段2a,2b,2c,2dと、各車輪それぞれのブレーキ圧を個別に加圧するブレーキ加圧手段7とを備え、ブレーキ加圧手段7は、車両が停止している状態で、車輪回転速度検出手段2a,2b,2c,2dにより各車輪のいずれかが回転していることが検出された場合に、予め定められた所定時間、車輪のブレーキ圧を加圧する。
(もっと読む)
車両用制動力制御装置
【課題】ブレーキペダルのペダルストローク量にノイズが混入したときであっても、ブレーキフィーリングの悪化を防止すること。
【解決手段】車両用制動力制御装置は、ブレーキペダル1と、電動ブースタ2と、ストロークセンサ18と、マスターシリンダ圧力センサ19と、倍力装置指令値演算手段61と、平滑化処理手段63と、を備える。ストロークセンサ18で検出されたペダルストローク量と、マスターシリンダ圧力センサ19で検出されたマスターシリンダ圧力と、から倍力装置指令値演算手段61によって倍力装置指令値が演算されて、演算された倍力装置指令値に、平滑化処理手段63によって平滑化処理を施して、電動ブースタ2の動作量とする。
(もっと読む)
車体挙動安定化装置
【課題】制動制御装置および駆動制御装置を用いた車体挙動安定化装置において、車体挙動安定化制御用のアクチュエータが異常となったときに車体挙動を安定化させる。
【解決手段】モータ・ジェネレータ5および/またはエンジン8の駆動力を制御することで第1の車体挙動安定化制御を実行する駆動制御指令部36と、ブレーキアクチュエータ12c〜12fを駆動制御して前後左右の車輪2・3の制動力を独立制御することで第2の車体挙動安定化制御を実行する制動制御部35と、ブレーキアクチュエータの異常を検出する異常検出部37とを備えた車体挙動安定化装置1において、異常検出部37がブレーキアクチュエータの異常を検出した場合、制動制御部35が2の車体挙動安定化制御を停止するとともに、駆動制御指令部36に対して車体挙動安定化制御の実行指令を出力し、駆動制御指令部36が単独で第1の車体挙動安定化制御を実行するようにする。
(もっと読む)
隊列走行制御装置
【課題】製造コストの増加を抑えつつ、先頭車両におけるフルブレーキ制動時の隊列走行の安定化を図ることができる隊列走行制御装置を提供することを目的としている。
【解決手段】手動又は自動運転される先頭車両1aに後続車両1bを自動追従させる隊列走行制御装置において、前走車両1aにおけるブレーキチャンバ32に加圧される最大エア圧よりも、自車両1bにおけるブレーキチャンバ32に加圧される最大エア圧を高い値に設定する調圧弁(比例制御弁)34aと、調圧弁34aを迂回するバイパス通路34eと、を備えたエアブレーキ手段(エアブレーキシステム)20a,20bと、隊列走行時、調圧弁34aを介してエアをブレーキチャンバ32に供給し、非隊列走行時、バイパス通路34eを介してエアをブレーキチャンバ32に供給するように切り替える隊列走行制御手段(統合コントローラ)10と、を備えた。
(もっと読む)
磁気式回転角検出装置及びブレーキバイワイヤ型制動制御装置
【課題】磁気式回転角検出装置に外乱磁界が作用して回転角検出誤差を生じる状態を的確に判定すること。
【解決手段】回転軸52の回転に伴って回転変位する磁石54と、磁石54の回転面に平行な面上に互いに直交方向する軸線方向に沿って配置され、90度の回転位相をもって磁石54の磁気強度を検出する2個の磁気検出素子58、・60と、磁気検出素子58、60により検出される磁気強度を合成した合成ベクトルに基づいて回転軸52の回転角を算出する回転角算出部62とを備えた磁気式回転角検出装置において、前記合成ベクトルの値と予め定められた閾値とを比較し、前記合成ベクトルの値が前記閾値を超えれば、異常を判定する異常判定部64を設ける。
(もっと読む)
車両用ブレーキ装置
【課題】電動式倍力装置のモータを制御する装置の異常時に、モータを適正に駆動してブレーキを掛けることができるバックアップ機能を低コストで実現すること。
【解決手段】荷重センサLS、液圧センサPS、ECU25及びモータドライバMDによるモータM1の駆動制御に異常が検出されると異常時切換スイッチSW1が切り替わり、これによってモータM1は、モータドライバMDとの導通が切断されるとともに、可変抵抗器VR1を介してバッテリBTに接続される。この時、可変抵抗器VR1はブレーキペダルBPの操作量と連動した抵抗値となっているので、この抵抗値に応じた電流がモータM1に流れ、モータM1はペダル操作量に応じたトルク即ちブレーキ力を発生させる。
(もっと読む)
ブレーキ制御装置
【課題】異常が発生した場合において制動力を充分に確保することを可能とするブレーキ制御装置を提供する。
【解決手段】ブレーキ制御装置は、液圧制動力と回生制動力とを併用して制動力を発生させる。このブレーキ制御装置は、異常時において補助的に発生させる回生制動力の要求値を演算する制御部と、運転者のブレーキ操作に連動して変動する検出値を制御部に各々が出力する複数のセンサと、を備える。制御部は、複数のセンサのいずれかを選択し、選択されたセンサの検出値を要求値の算出の基礎として用いる。
(もっと読む)
センサ異常判定装置
【課題】ストロークセンサの異常を適切に判定できるセンサ異常判定技術を提供する。
【解決手段】第1監視部102は、非接触式の第1ストロークセンサ46aの第1出力電圧を監視する。第2監視部104は、非接触式の第2ストロークセンサ46bの第2出力電圧を監視する。異常判定部122は、監視結果を受け取り、第1ストロークセンサ46aまたは第2ストロークセンサ46bに異常が生じたか否かを判定する。判定制御部124は、異常判定部122による判定処理の実行を制御する。第1監視部102には、監視可能な上限監視電圧V1が設定されている。第1電圧判定部126は、第1出力電圧が上限監視電圧V1以上となる可能性があるか否かを判定し、可能性があれば、判定制御部124が、異常判定部122による判定処理を停止する。
(もっと読む)
ブレーキスイッチの異常検出装置
【課題】 ブレーキスイッチの異常を精度良く検出可能なブレーキスイッチの異常検出装置を提供すること。
【解決手段】 本発明では、ブレーキストローク検出手段により検出されたストローク量と、ブレーキスイッチにより検出されたブレーキペダルの作動状態とに基づいて、ブレーキスイッチの異常を判断することとした。
(もっと読む)
アンチロックブレーキ制御装置
【課題】ABS制御を実行する車輪の回転速度のみに基づいて、実際の路面状態に沿ったABS制御を実行することができるアンチロックブレーキ制御装置を提供する。
【解決手段】アンチロックブレーキ制御手段65は、検知された回転速度Vに基づいて算出された前輪減速度Gが第1スリップ検出閾値G1を超えることで前輪WFのロック状態を判定すると共に、乗員の操作により生じているブレーキ圧を開放制御してロック状態を解消する。ブレーキ圧の開放制御に伴って前輪WFの回転が復帰する際に発生する復帰加速度Gfに基づいて、少なくとも路面摩擦の大きさに起因すると共に自動二輪車1の停止しやすさの指標となる推定減速度Gsを導出する路面摩擦推定手段66を具備する。アンチロックブレーキ制御手段65は、推定減速度Gsに応じて目標前輪回転車速Vmを算出し、ABS制御中は回転速度Vが目標前輪回転速度Vmに収束するようにブレーキ圧を制御する。
(もっと読む)
車両の走行制御装置
【課題】旋回補助制御及びトラクション制御が同時に実行される場合に、車輪速度を検出する装置の異常に起因して基準車輪速度が不適切な値になりトラクション制御が不適切に実行されることを防止する。
【解決手段】旋回外輪に比して旋回内輪の前後力が小さくなるよう車輪の前後力を制御する旋回補助制御と、車輪の駆動スリップが過大であるときには当該車輪の前後力を低減することにより駆動スリップを低減するトラクション制御とを行う車両の走行制御装置。旋回内輪以外の一つの車輪の車輪速度検出手段に実際の車輪速度よりも低い値として車輪速度を検出する異常が生じており且つ旋回補助制御が実行されているときには、旋回内輪を除く三つの車輪の車輪速度のうち二番目に低い車輪速度Vmedloに基づいて車輪の駆動スリップを判定するための基準車輪速度Vwbを設定する。
(もっと読む)
回生制動制御装置
【課題】本発明は、ブレーキフィーリングを向上することのできる回生制動制御装置を提供する。
【解決手段】ペダル回生最大トルク演算ブロック(B18a)では、入力された車速におけるブレーキペダル操作で発生しうる最大の回生トルクであるペダル回生最大トルクが演算される。また、ゲイン演算ブロック(B18b)では、ブレーキペダルストローク量が所定操作量以下の少ない領域においてはブレーキペダルストローク量の変化量に対するゲインの変化量を少なくし、ブレーキペダルストローク量が所定操作量より多い領域においてはブレーキストローク量の変化量に対するゲインの変化量を多くしている。そして、ペダル回生最大トルクとゲインとを乗算し、ペダル回生トルクが演算され、切換ブロックに供給される。
(もっと読む)
故障検出器及び故障検出方法,ブレーキ演算器及びそれを用いた鉄道車両制御システム
【課題】鉄道車両の速度検出部の故障を検出することで、速度誤認による危険側誤制御を防止する。
【解決手段】車両が速度超過した時に保安ブレーキ指令を出力する演算器と、速度センサからの速度信号に基づいて検出した車両の動き方向(前進/後退)を論理値に割り当てて出力する回路を2つと、その各々の出力(A,B)を(X,Y)=(NOT(A)∪NOT(B),A∪B)に変換する回路とを備え、演算器が(X,Y)の値に応じて故障モードを判定し、故障モードに応じて保安ブレーキ指令を決めるというブレーキ演算器を用いる。
(もっと読む)
車両用制御装置
【課題】実ヨーレートの急変の影響を受けることなく、実横加速度を適正に補正することができる車両用制御装置を提供することを目的とする。
【解決手段】車両用制御装置(制御部20)は、実ヨーレートYsの変化率が所定値以上か否かを判断する急変判定手段209と、舵角センサ92で検出する舵角量に基づいて規範ヨーレートYcを算出する規範ヨーレート演算手段202と、急変判定手段209によって変化率が所定値未満であると判断された場合には、実横加速度Gysを実ヨーレートYsに基づいて補正し、急変判定手段209によって変化率が所定値以上であると判断された場合には、実ヨーレートYsを規範ヨーレートYcに切り替えて実横加速度Gysを補正する補正手段220と、を備えている。
(もっと読む)
すべり角推定装置
【課題】横加速度センサに異常が発生した場合は、その異常による影響を小さくしてすべり角を推定できるすべり角推定装置を提供することを課題とする。
【解決手段】実車挙動観測装置302は、β推定ブロック302aが推定するすべり角推定基準値βstdを、β補償ブロック302bが算出するすべり角補償値βcで補償して、推定重心すべり角βactを推定する。β補償ブロック302bは、横加速度センサから入力される横加速度信号GSに基づいて算出するすべり角補償値βcの大きさを、β補償器リミッタ322gで上限値βlmtuと下限値βlmtdの間に制限し、横加速度信号GSを出力する横加速度センサに異常が発生した場合に、すべり角補償値βcが上限値βlmtuより大きくなることおよび下限値βlmtdより小さくなることを防止する。
(もっと読む)
すべり角推定装置
【課題】横加速度センサに異常が発生した場合は、その異常による影響を小さくしてすべり角を推定できるすべり角推定装置を提供する。
【解決手段】実車挙動観測装置302は、β推定ブロック302aが推定するすべり角推定基準値βstdを、β補償ブロック302bが算出するすべり角補償値βcで補償して、推定重心すべり角βactを推定する。β補償ブロック302bは、横加速度センサから入力される横加速度信号GSに基づいて算出するすべり角補償値βcの大きさを、β補償器リミッタ322gで上限値と下限値の間に制限し、横加速度信号GSを出力する横加速度センサに異常が発生した場合に、すべり角補償値βcが上限値より大きくなることおよび下限値より小さくなることを防止する。
(もっと読む)
付随車用アンチロックブレーキシステム
【課題】電気ブレーキ指令線が無い貨車にも適用することができ、ブレーキ条件に依存することなく滑走防止制御演算部を起動させて、滑走を適切に抑制可能なアンチロックブレーキシステムを提供する。
【解決手段】空気圧力により制動力を発生させる制動力発生機構1と、速度センサ2と、速度センサ2からの回転速度信号に基づいて制動判別処理及び滑走判別処理を行い滑走状態であれば滑走防止信号を出力する滑走防止制御演算部3と、滑走防止信号を受け再粘着動作を行う滑走防止弁4と、車輪の回転運動に基づいて電力を発生する発電機5と、滑走防止制御演算部3に電力を供給可能な蓄電部6と、発電機5の出力を基に所定電圧を生成する電圧生成充電制御部7とを備え、電圧生成充電制御部7から発電機出力と蓄電部6の蓄電出力との高位優先電圧で滑走防止制御演算部3に電力を供給するアンチロックブレーキXとした。
(もっと読む)
ブレーキ装置
【課題】バキュームブースタを備えたブレーキ装置において、センサ異常時に、助勢限界後アシスト制御が適切に行われるようにする。
【解決手段】ブースタ負圧センサ、大気圧センサ、マスタシリンダ液圧センサのうちの少なくとも1つが異常である場合には、助勢限界時液圧を正確に取得できなかったり、マスタシリンダ液圧を正確に取得できなかったりするため、助勢限界後アシスト制御を適切な時期に開始することが困難であり、アシスト量を適切な大きさに制御することが困難である。そこで、減速度センサの検出値が設定減速度GB以上になった場合に助勢限界後アシスト制御が開始され、助勢限界後アシスト制御において、アシスト量を一定の固定値とする。それにより、センサが異常であっても、助勢限界後アシスト制御を適切に行うことができる。
(もっと読む)
車両用制御装置
【課題】GPS受信装置が無くても大気圧センサの異常検出を行うことができるようにする。
【解決手段】前後加速度センサの検出信号に基づいて検出される勾配角度θや車輪速度センサの検出信号に基づいて演算される推定車体加速度dVに基づいて高度変化量を算出し、高度変化量から気圧変化量を推定する。そして、気圧変化量のセンサ値と推定値とを比較することにより、大気圧センサの異常を検出する。これにより、GPS受信装置が無くても大気圧センサの異常検出を行うことが可能となる。
(もっと読む)
1 - 20 / 71
[ Back to top ]