
車両の走行制御装置
【課題】旋回補助制御及びトラクション制御が同時に実行される場合に、車輪速度を検出する装置の異常に起因して基準車輪速度が不適切な値になりトラクション制御が不適切に実行されることを防止する。
【解決手段】旋回外輪に比して旋回内輪の前後力が小さくなるよう車輪の前後力を制御する旋回補助制御と、車輪の駆動スリップが過大であるときには当該車輪の前後力を低減することにより駆動スリップを低減するトラクション制御とを行う車両の走行制御装置。旋回内輪以外の一つの車輪の車輪速度検出手段に実際の車輪速度よりも低い値として車輪速度を検出する異常が生じており且つ旋回補助制御が実行されているときには、旋回内輪を除く三つの車輪の車輪速度のうち二番目に低い車輪速度Vmedloに基づいて車輪の駆動スリップを判定するための基準車輪速度Vwbを設定する。
【解決手段】旋回外輪に比して旋回内輪の前後力が小さくなるよう車輪の前後力を制御する旋回補助制御と、車輪の駆動スリップが過大であるときには当該車輪の前後力を低減することにより駆動スリップを低減するトラクション制御とを行う車両の走行制御装置。旋回内輪以外の一つの車輪の車輪速度検出手段に実際の車輪速度よりも低い値として車輪速度を検出する異常が生じており且つ旋回補助制御が実行されているときには、旋回内輪を除く三つの車輪の車輪速度のうち二番目に低い車輪速度Vmedloに基づいて車輪の駆動スリップを判定するための基準車輪速度Vwbを設定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両の走行制御装置に係り、更に詳細には旋回外輪に比して旋回内輪の前後力が小さくなるよう車輪の前後力を制御する旋回補助制御と、車輪の駆動スリップが過大であるときには当該車輪の前後力を低減することにより駆動スリップを低減するトラクション制御とを行う走行制御装置に係る。
【背景技術】
【0002】
旋回補助制御、例えば旋回内側後輪に制動力を付与することにより車両の旋回性能を向上させる制御は既に知られており、例えば下記の特許文献1に記載されている。またトラクション制御、例えば駆動スリップが過大な車輪に制動力を付与して駆動スリップを低減する制御も既によく知られている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平11−49020号公報
【発明の概要】
【0004】
〔発明が解決しようとする課題〕
旋回補助制御及びトラクション制御の制御対象車輪及び制御の内容は互いに異なり、互いに干渉しないので、旋回補助制御及びトラクション制御の両者が同時に実行される場合がある。
【0005】
旋回補助制御による制動力の付与が行われていない状況に於いてトラクション制御が実行される場合には、駆動スリップを判定するための基準車輪速度は四つの車輪の車輪速度のうち最も低い車輪速度に設定される。これに対し旋回補助制御による制動力の付与が行われている状況に於いてトラクション制御が実行される場合には、基準車輪速度は旋回補助制御により制動力が付与されている車輪を除く三つの車輪の車輪速度のうち最も低い車輪速度に設定される。
【0006】
一般に、車輪速度は車輪速度センサにより検出されるが、車輪速度センサに異常が生じる場合がある。そして車輪速度センサに異常が生じると、異常に起因してトラクション制御が不適切に実行される事態が生じる。例えば旋回補助制御により制動力が付与されている車輪以外の車輪速度センサに実際の車輪速度よりも低い値として車輪速度を検出する異常が生じた場合について考える。この場合には旋回補助制御により制動力が付与されている車輪の車輪速度及び異常な車輪速度センサにより検出される車輪速度が低い値になる。そのため基準車輪速度が旋回補助制御により制動力が付与されている車輪を除く三つの車輪の車輪速度のうち最も低い車輪速度に設定されると、基準車輪速度が過剰に低い値になるので、トラクション制御が不適切に実行されることになる。
【0007】
本発明は、旋回補助制御及びトラクション制御の両者が同時に実行される場合であって、車輪速度センサに実際の車輪速度よりも低い値として車輪速度を検出する異常が生じた場合に於ける上述の問題に着目してなされたものである。そして本発明の主要な課題は、旋回補助制御及びトラクション制御の両者が同時に実行される場合に、車輪速度を検出する装置の異常に起因して基準車輪速度が不適切な値になりトラクション制御が不適切に実行されることを防止することである。
【0008】
〔課題を解決するための手段及び発明の効果〕
上述の主要な課題は、本発明によれば、請求項1の構成、即ち一つの旋回内輪の前後力を低減することにより旋回外輪に比して旋回内輪の前後力が小さくなるよう車輪の前後力を制御する旋回補助制御と、車輪の駆動スリップが過大であるときには当該車輪の前後力を低減することにより駆動スリップを低減するトラクション制御とを行う四輪駆動車の走行制御装置に於いて、各車輪の車輪速度を検出する車輪速度検出手段を有し、前記旋回内輪以外の一つの車輪の車輪速度検出手段に実際の車輪速度よりも低い値として車輪速度を検出する異常が生じており且つ前記旋回補助制御が実行されているときには、前記旋回内輪を除く三つの車輪の車輪速度のうち二番目に低い車輪速度に基づいて車輪の駆動スリップを判定するための基準車輪速度を設定することを特徴とする車両の走行制御装置によって達成される。
【0009】
上記の構成によれば、旋回内輪を除く三つの車輪の車輪速度のうち二番目に低い車輪速度に基づいて車輪の駆動スリップを判定するための基準車輪速度が設定される。よって車輪速度検出手段に実際の車輪速度よりも低い値として車輪速度を検出する異常が生じており且つ旋回補助制御が実行されている場合に、基準車輪速度が過剰に低い値になりトラクション制御が不適切に実行されることを防止することができる。
また請求項1の構成によれば、旋回内輪を除く三つの車輪の車輪速度のうち二番目に低い車輪速度が解れば基準車輪速度を設定することができる。よって車輪速度検出手段に異常が生じている車輪を特定することなく基準車輪速度を設定することができる。
【0010】
また本発明によれば、上述の主要な課題を効果的に達成すべく、上記請求項1の構成に於いて、全ての車輪速度検出手段が正常であり且つ前記旋回補助制御が実行されているときには、前記旋回内輪を除く三つの車輪の車輪速度のうち最も低い車輪速度に基づいて車輪の駆動スリップを判定するための基準車輪速度を設定するよう構成される(請求項2の構成)。
【0011】
上記の構成によれば、全ての車輪速度検出手段が正常であり且つ前記旋回補助制御が実行されている場合には、基準車輪速度を適正な値に設定することができる。
【0012】
また本発明によれば、上述の主要な課題を効果的に達成すべく、上記請求項1の構成に於いて、前記旋回内輪以外の一つの車輪の車輪速度検出手段に実際の車輪速度よりも高い値として車輪速度を検出する異常が生じている状況にて前記旋回補助制御が実行されているときには、前記旋回内輪及び車輪速度検出手段が異常な車輪を除く二つの車輪の車輪速度のうち低い方の車輪速度に基づいて車輪の駆動スリップを判定するための基準車輪速度を設定し、車輪速度検出手段が異常な車輪について車輪の駆動スリップを判定しないよう構成される(請求項3の構成)。
【0013】
上記の構成によれば、旋回内輪以外の一つの車輪の車輪速度検出手段に実際の車輪速度よりも高い値として車輪速度を検出する異常が生じている場合にも、基準車輪速度を適正な値に設定することができる。
【0014】
また本発明によれば、上述の主要な課題を効果的に達成すべく、上記請求項1乃至3の何れか一つの構成に於いて、各車輪の制動力を検出する制動力検出手段を有し、前記旋回補助制御に於いては前記旋回内輪の制動力に基づいて前記旋回内輪の前後力を低減し、全ての車輪速度検出手段が正常であり且つ前記旋回補助制御が実行されているとき、又は前記旋回内輪の車輪の車輪速度検出手段に実際の車輪速度よりも低い値として車輪速度を検出する異常が生じており且つ前記旋回補助制御が実行されているときには、前記旋回内輪を除く三つの車輪の車輪速度のうち最も低い車輪速度に基づいて車輪の駆動スリップを判定するための基準車輪速度を設定するよう構成される(請求項4の構成)。
【0015】
上記の構成によれば、旋回内輪の制動力に基づいて旋回補助制御による旋回内輪の前後力の低減が行われる車両に於いて、車輪速度検出手段が正常であるか否かに関係なく基準車輪速度を適正な値に設定することができる。
【0016】
尚本願に於いて、車輪の「前後力」は車両の進行方向を正とする制駆動力である。そして前後力の低減は車両の進行方向の前後力の大きさを小さくすることのみならず、車両の進行方向の前後力を発生している車輪に車両の進行方向とは逆方向の前後力を付加することを含むものである。
【0017】
また本願に於いて、「旋回内側後輪」は車両の進行方向に対し後ろ側にある旋回内輪を意味する。よって「旋回内側後輪」の「後輪」は車両が前進するときには車両の後輪であるが、車両が後進するときには車両の前輪である。
【0018】
〔課題解決手段の好ましい態様〕
本発明の一つの好ましい態様によれば、上記請求項1乃至4の構成に於いて、旋回補助制御は旋回内輪に制動力を付与することにより車両に旋回補助方向のヨーモーメントを付与する制御であるよう構成される(好ましい態様1)。
【0019】
本発明の他の一つの好ましい態様によれば、上記好ましい態様1の構成に於いて、旋回内輪は旋回内側後輪であるよう構成される(好ましい態様2)。
【0020】
本発明の他の一つの好ましい態様によれば、上記請求項1乃至4の構成に於いて、トラクション制御は制御対象車輪に制動力を付与することにより当該車輪の駆動スリップを低減する制御であるよう構成される(好ましい態様3)。
【0021】
本発明の他の一つの好ましい態様によれば、上記請求項1乃至3の構成に於いて、旋回補助制御に於いては車輪速度に基づいて旋回内輪の前後力を低減するよう構成される(好ましい態様4)。
【0022】
本発明の他の一つの好ましい態様によれば、上記好ましい態様4の構成に於いて、旋回内輪の車輪速度検出手段が異常であるときには、旋回補助制御による旋回内輪の前後力の低減を行わないよう構成される(好ましい態様5)。
【0023】
本発明の他の一つの好ましい態様によれば、上記請求項2の構成に於いて、前記三つの車輪のうち最も車輪速度が高い車輪及び二番目に車輪速度が高い車輪について駆動スリップを判定するよう構成される(好ましい態様6)。
【0024】
本発明の他の一つの好ましい態様によれば、上記請求項3の構成に於いて、前記二つの車輪のうち車輪速度が高い方の車輪について駆動スリップを判定するよう構成される(好ましい態様7)。
【0025】
本発明の他の一つの好ましい態様によれば、上記請求項1乃至4の構成に於いて、車両はオフロード車であるよう構成される(好ましい態様8)。
【0026】
本発明の他の一つの好ましい態様によれば、上記好ましい態様8の構成に於いて、旋回補助制御は旋回内側後輪がロック状態になるまで旋回内側後輪に制動力を付与するよう構成される(好ましい態様9)。
【図面の簡単な説明】
【0027】
【図1】本発明による車両の走行制御装置の第一の実施形態を示す概略構成図である。
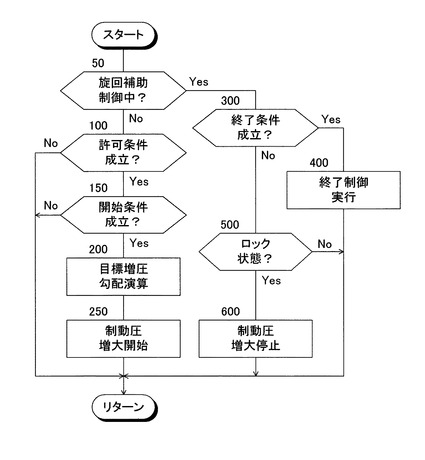
【図2】第一の実施形態に於ける旋回補助制御のルーチンを示すフローチャートである。
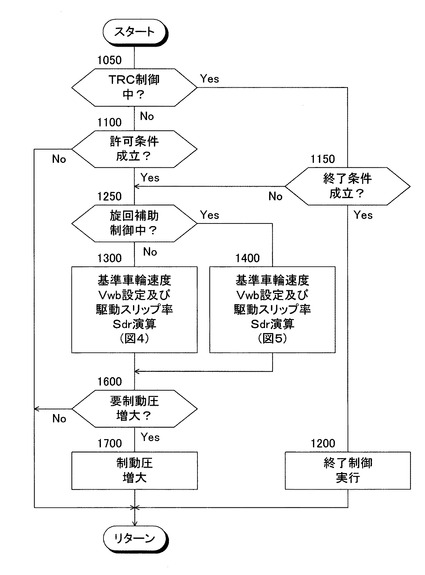
【図3】第一の実施形態に於けるトラクション制御のルーチンを示すフローチャートである。
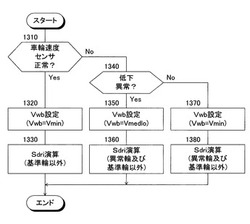
【図4】第一の実施形態のトラクション制御に於いて旋回補助制御により旋回内側後輪に制動力が付与されていないときの基準車輪速度Vwb及び駆動スリップ率Sdriの演算ルーチンを示すフローチャートである。
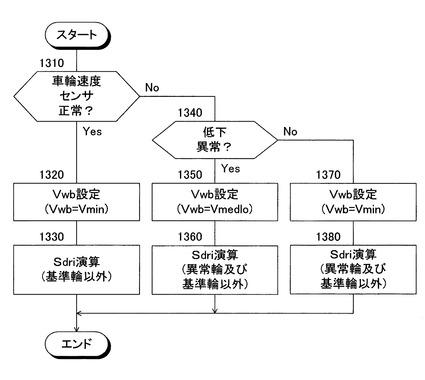
【図5】第一の実施形態のトラクション制御に於いて旋回補助制御により旋回内側後輪に制動力が付与されているときの基準車輪速度Vwb及び駆動スリップ率Sdriの演算ルーチンを示すフローチャートである。
【図6】本発明による車両の走行制御装置の第二の実施形態を示す概略構成図である。
【図7】第二の実施形態に於ける旋回補助制御のルーチンを示すフローチャートである。
【図8】第二の実施形態に於けるトラクション制御のルーチンを示すフローチャートである。
【図9】第二の実施形態のトラクション制御に於いて旋回補助制御により旋回内側後輪に制動力が付与されているときの基準車輪速度Vwb及び駆動スリップ率Sdriの演算ルーチンを示すフローチャートである。
【発明を実施するための形態】
【0028】
以下に添付の図を参照しつつ、本発明を好ましい幾つかの実施形態について詳細に説明する。
【0029】
第一の実施形態
図1は本発明による車両の走行制御装置の第一の実施形態を示す概略構成図である。
【0030】
図1に於いて、100は車両102に搭載された走行制御装置を全体的に示している。また10はエンジンを示しており、エンジン10の駆動力はトルクコンバータ12及びトランスミッション14を介して出力軸16へ伝達される。出力軸16の駆動力は駆動状態を切替えるトランスファー18により前輪用駆動軸20若しくは後輪用駆動軸22へ伝達される。エンジン10の出力は運転者により操作されるアクセルペダル23の踏み込み量等に応じてエンジン制御装置24により制御される。
【0031】
またトランスファー18は駆動状態を4WD状態と2WD状態とに切替えるアクチュエータを含み、該アクチュエータは運転者により操作される選択スイッチ(SW)26に応答して4WD制御装置28により制御される。選択スイッチ26はH4位置、H2位置、N位置、L4位置に切替えられるようになっている。
【0032】
選択スイッチ26がH4位置にあるときには、トランスファー18は出力軸16の駆動力を前輪用駆動軸20及び後輪用駆動軸22へ伝達する4WD位置に設定される。これに対し選択スイッチ26がH2位置にあるときには、トランスファー18は出力軸16の駆動力を後輪用駆動軸22のみへ伝達する2WD位置に設定される。選択スイッチ26がN位置にあるときには、トランスファー18は出力軸16の駆動力を前輪用駆動軸20及び後輪用駆動軸22の何れにも伝達しない位置に設定される。更に選択スイッチ26がL4位置にあるときには、トランスファー18はH4位置の場合よりも低車速高トルク用の駆動力として出力軸16の駆動力を前輪用駆動軸20及び後輪用駆動軸22へ伝達する4WD位置に設定される。
【0033】
図1に示されている如く、4WD制御装置28は選択スイッチ26より入力される指令信号に基づきトランスファー18に対する4WD制御装置28の指令位置が2WD位置及び4WD位置の何れであるかを示す信号をエンジン制御装置24へ出力する。エンジン制御装置24は4WD制御装置28の指令位置に応じてエンジン10の出力を制御する。
【0034】
前輪用駆動軸20の駆動力は前輪ディファレンシャル30により左前輪車軸32L及び右前輪車軸32Rへ伝達され、これにより左右の前輪34FL及び34FRが回転駆動される。同様に後輪用駆動軸22の駆動力は後輪ディファレンシャル36により左後輪車軸38L及び右後輪車軸38Rへ伝達され、これにより左右の後輪40RL及び40RRが回転駆動される。
【0035】
左右の前輪34FL、34FR及び左右の後輪40RL、40RRの制動力は制動装置42の油圧回路44により対応するホイールシリンダ46FL、46FR、46RL、46RRの制動圧が制御されることによって制御される。図には示されていないが、油圧回路44はリザーバ、オイルポンプ、種々の弁装置等を含んでいる。各ホイールシリンダの制動圧は通常時には運転者によるブレーキペダル47の踏み込み操作に応じて駆動されるマスタシリンダ48により制御され、また必要に応じて後に詳細に説明する如く走行制御用電子制御装置50により制御される。
【0036】
電子制御装置50には車輪速度センサ52FL、52FR、52RL、52RRより左右前輪及び左右後輪の車輪速度Vi(i=fl、fr、rl、rr)を示す信号が入力される。また電子制御装置50には車速センサ54より車速Vを示す信号が入力され、操舵角センサ56より操舵角θを示す信号が入力される。尚操舵角センサ56は車両の左旋回方向を正として操舵角を検出する。
【0037】
また電子制御装置50には選択スイッチ26よりトランスファー18が何れの位置にあるかを示す信号が入力され、また車両の乗員により操作される旋回補助スイッチ58より旋回補助スイッチがオンか否かを示す信号が入力される。
【0038】
またエンジン制御装置24にはアクセルペダル23に設けられた図1には示されていないアクセル開度センサよりアクセル開度Accを示す信号が入力される。尚エンジン制御装置24、4WD制御装置28、電子制御装置50は実際には例えばCPU、ROM、RAM、入出力装置を含む一つのマイクロコンピュータ及び駆動回路にて構成されていてよい。
【0039】
後に詳細に説明する如く、電子制御装置50は旋回補助スイッチ58がオンであるときには、旋回補助制御による制御力の付与を実行すべきか否かを判定する。そして電子制御装置50は実行すべきと判定したときには、旋回内側後輪に制動力を付与して車両に旋回を補助するヨーモーメントを付与する。
【0040】
また電子制御装置50は車両が駆動状態にあるときには、トラクション制御の制御対象車輪について駆動スリップ率Sdri(i=fl、fr、rl、rr)を演算する。そして電子制御装置50は駆動スリップ率が過大な車輪があるときには、当該車輪に駆動スリップ率に応じた制動力を付与し、これにより過大な駆動スリップを低減するトラクション制御を行う。
【0041】
駆動スリップ率Sdriは当該車輪の車輪速度Vi及び基準車輪速度Vwbに基づいて下記の式1に従って演算される。
Sdri=(Vi−Vwb)/Vwb ……(1)
【0042】
基準車輪速度Vwb及びトラクション制御の制御対象車輪は、図3乃至図5に示されたフローチャートに従って、旋回補助制御による制動力の付与が実行されているか否か及び何れかの車輪速度センサに異常が生じているか否かに応じて異なる態様にて設定される。尚これ以降の説明に於いては、車輪速度センサ52FL〜52RRにより検出される車輪速度Viはその低い順にVmin、Vmedlo、Vmedhi、Vmaxとされる。
【0043】
また車輪速度センサにより検出される車輪速度があり得ない値であるときに、車輪速度センサに異常が生じていると判定される。例えば車両が制動状態になく、他の車輪速度センサによる検出車輪速度が走行判定の基準値以上である状況に於いて、一つの車輪速度センサによる検出車輪速度が異常判定の基準値未満であるときに、その車輪速度センサに低出力の異常が生じていると判定される。この異常の代表的な例は導線の断線や可動部材の固着の異常である。
【0044】
また車両が加速状態になく、他の車輪速度センサによる検出車輪速度が走行判定の基準値以下である状況に於いて、一つの車輪速度センサによる検出車輪速度が異常判定の基準値よりも高いときに、その車輪速度センサに高出力の異常が生じていると判定される。この異常の代表的な例は導線のショートの異常である。
【0045】
尚電子制御装置50は、旋回内側後輪の車輪速度センサに異常が生じているときには、旋回補助制御による制動力の付与を行わない。また電子制御装置50は、二つ以上の車輪速度センサに異常が生じているときには、トラクション制御による制動力の付与を行わない。
【0046】
更に電子制御装置50は図には示されていないヨーレートセンサ等により検出される車両の状態量に基づいて車両が過大なオーバーステア状態又はアンダーステア状態にあるか否か、即ち車両運動制御による制御力の付与が必要であるか否かを判定する。そして電子制御装置50は制御力の付与が必要であると判定したときには、車両運動制御の制御対象車輪に制動力を付与して車両の旋回運動を安定化させるオーバーステア抑制制御又はアンダーステア抑制制御を行う。
【0047】
特にオーバーステア抑制制御に於いては、少なくとも旋回外側前輪に制動力が付与されることにより、車両に旋回抑制方向のヨーモーメントが付与されると共に車両が減速される。またアンダーステア抑制制御に於いては、少なくとも左右後輪に制動力が付与され、旋回内側後輪の制動力が旋回外側後輪の制動力よりも高くされることにより、車両が減速されると共に車両に旋回促進方向のヨーモーメントが付与される。
【0048】
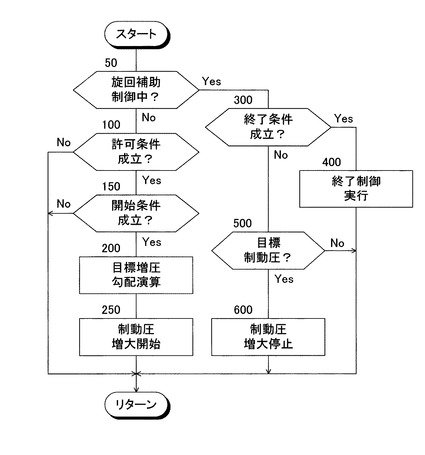
次に図2に示されたフローチャートを参照して第一の実施形態に於ける旋回補助制御のルーチンについて説明する。尚図2に示されたフローチャートによる制御は図には示されていないイグニッションスイッチの閉成により開始され、所定の時間毎に繰返し実行される。
【0049】
まずステップ50に於いては旋回補助制御による制動力の付与、即ち旋回内側後輪に対する制動力の付与が行われているか否かの判別が行われる。そして肯定判別が行われたときには制御はステップ300へ進み、否定判別が行われたときには制御はステップ100へ進む。
【0050】
ステップ100に於いては旋回補助制御による制動力の付与の許可条件が成立しているか否かの判別が行われる。そして否定判別が行われたときには制御は一旦終了され、肯定判別が行われたときには制御はステップ150へ進む。
【0051】
この場合以下の全ての条件が成立しているときに旋回補助制御による制動力の付与の許可条件が成立していると判定されてよい。
(a1)制動装置42が正常で、車両の運動制御を正常に実行可能である。
(a2)選択スイッチ26がL4位置に設定されている。
(a3)旋回補助スイッチ58がオン位置に設定されている。
(a4)車両の運動制御による制動力の付与が実行されていない。
(a5)旋回内側後輪の車輪速度センサが正常である。
【0052】
ステップ150に於いては旋回補助制御による制動力の付与の開始可条件が成立しているか否かの判別が行われる。そして否定判別が行われたときには制御が一旦終了され、肯定判別が行われたときには制御はステップ200へ進む。
【0053】
この場合(b1)操舵角θの絶対値が基準値θtas以上である、及び(b2)アクセルペダル23が踏み込まれている、の二つの条件が成立しているときに旋回補助制御による制動力の付与の開始条件が成立していると判定されてよい。尚基準値θtasは正の定数であってもよいが、車速Vが低いときには車速Vが高いときに比して大きい値になるよう、車速Vに応じて可変設定されてもよい。
【0054】
ステップ200に於いては操舵角θの絶対値が大きいときには操舵角θの絶対値が小さいときに比して大きい値になるよう、操舵角θの絶対値に基づいて旋回内側後輪の目標増圧勾配ΔPbrintが演算される。尚目標増圧勾配がΔPbrintは車速Vが低いときには車速Vが高いときに比して大きい値になるよう、車速Vにも応じて可変設定されてもよい。
【0055】
ステップ250に於いては旋回内側後輪の増圧勾配が目標増圧勾配ΔPbrintになるよう、旋回内側後輪の制動圧が制御され、これにより旋回内側後輪に対する制動力の付与が開始される。
【0056】
ステップ300に於いては旋回補助制御による制動力の付与の終了条件が成立しているか否かの判別が行われる。そして否定判別が行われたときには制御はステップ500へ進み、肯定判別が行われたときには制御はステップ400へ進む。
【0057】
この場合下記の何れかの条件が成立しているときに旋回補助制御による制動力の付与の終了条件が成立していると判定されてよい。
(c1)操舵角θの絶対値が制御終了の基準値θtae(正の定数)以下になった。
(c2)旋回補助スイッチ62がオフ位置に切替えられた。
(c3)挙動制御による制動力の付与が必要になった。
(c4)車両の運動制御を正常に実行できなくなった。
(c5)旋回内側後輪の車輪速度センサが異常になった。
【0058】
ステップ400に於いては旋回内側後輪の制動圧が低減され、これにより旋回内側後輪に対する制動力の付与が終了される。
【0059】
ステップ500に於いては旋回内側後輪の制動スリップ率Sbrinが演算され、制動スリップ率Sbrinに基づいて旋回内側後輪がロック状態にあるか否かの判別が行われる。そして否定判別が行われたときには制御が一旦終了され、肯定判別が行われたときには制御はステップ600へ進む。
【0060】
ステップ600に於いては旋回内側後輪の制動圧の増大が停止され、これにより旋回内側後輪の制動力の増大が停止される。
【0061】
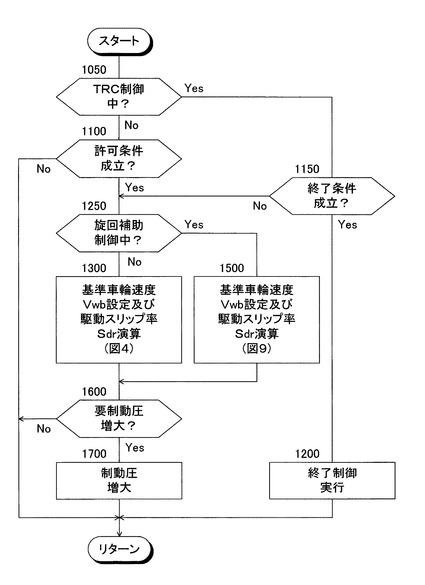
次に図3に示されたフローチャートを参照して第一の実施形態に於けるトラクション制御のルーチンについて説明する。尚図3に示されたフローチャートによる制御も図には示されていないイグニッションスイッチの閉成により開始され、所定の時間毎に繰返し実行される。
【0062】
まずステップ1050に於いてはトラクション制御による制動力の付与が行われているか否かの判別が行われ、肯定判別が行われたときには制御はステップ1150へ進み、否定判別が行われたときには制御はステップ1100へ進む。
【0063】
ステップ1100に於いてはトラクション制御の許可条件が成立しているか否かの判別が行われ、否定判別が行われたときには制御は一旦終了され、肯定判別が行われたときには制御はステップ1250へ進む。
【0064】
この場合以下の全ての条件が成立しているときにトラクション制御の許可条件が成立していると判定されてよい。
(d1)制動装置42が正常で、トラクション制御を正常に実行可能である。
(d2)アクセル開度Accが許可判定の基準値(正の定数)以上である。
(d3)二つ以上の車輪速度センサに異常が生じていない。
【0065】
ステップ1150に於いてはトラクション制御の終了条件が成立しているか否かの判別が行われ、否定判別が行われたときには制御はステップ1250へ進み、肯定判別が行われたときには制御はステップ1200へ進む。
【0066】
この場合下記の何れかの条件が成立しているときにトラクション制御の終了条件が成立していると判定されてよい。
(e1)駆動スリップ率Sdriが制御終了基準値Sdre(正の定数)以下になった。
(e2)制動装置42が異常で、トラクション制御を正常に実行できなくなった。
(e3))アクセル開度Accが許可判定の基準値未満になった。
(e4)二つ以上の車輪速度センサに異常が生じた。
【0067】
ステップ1200に於いてはトラクション制御による制動力が付与される制御対象車輪の制動圧が0に低減され、これによりトラクション制御の制御対象車輪に対する制動力の付与が終了される。
【0068】
ステップ1250に於いては旋回補助制御により旋回内側後輪に制動力が付与されているか否かの判別が行われ、肯定判別が行われたときには制御はステップ1400へ進み、否定判別が行われたときには制御はステップ1300へ進む。
【0069】
ステップ1300に於いては図4に示されたフローチャートに従って旋回補助制御により旋回内側後輪に制動力が付与されていないときの基準車輪速度Vwb及び駆動スリップ率Sdri(iはfl、fr、rl、rrの何れか)が演算される。
【0070】
ステップ1400に於いては図5に示されたフローチャートに従って旋回補助制御により旋回内側後輪に制動力が付与されているときの基準車輪速度Vwb及び駆動スリップ率Sdriが演算される。
【0071】
ステップ1600に於いては駆動スリップ率Sdriが基準値Sdrs以上であるか否かの判別により、当該車輪の制動圧を増大させて駆動スリップを低減する必要があるか否かの判別が行われる。そして否定判別が行われたときには制御は一旦終了され、肯定判別が行われたときには制御はステップ1700へ進む。
【0072】
尚、基準値Sdrsは正の定数であってもよいが、車速Vが低いときには車速Vが高いときに比して大きい値になるよう、車速Vに応じて可変設定されてもよい。
【0073】
ステップ1700に於いては当該車輪の制動圧が増大され、これにより当該車輪の車輪速度が低下されることにより駆動スリップが低減される。
【0074】
図4に示されている如く、ステップ1310に於いては全ての車輪速度センサ52FL〜52RRが正常であるか否かの判別が行われる。そして否定判別が行われたときには制御はステップ1340へ進み、肯定判別が行われたときには制御はステップ1320へ進む。
【0075】
ステップ1320に於いては駆動スリップ率Sdriを演算するための基準車輪速度Vwbが、全ての車輪の車輪速度のうち最も低い車輪速度Vminに設定される。
【0076】
ステップ1330に於いては基準輪以外の三つの車輪について、当該車輪の車輪速度Vi及び基準車輪速度Vwbに基づいて上記式1に従って駆動スリップ率Sdriが演算される。
【0077】
ステップ1340に於いては車輪速度センサの異常が実際の車輪速度よりも低い値として車輪速度を検出する出力低下異常であるか否かの判別が行われる。そして否定判別が行われたときには制御はステップ1370へ進み、肯定判別が行われたときには制御はステップ1350へ進む。
【0078】
ステップ1350に於いては駆動スリップ率Sdriを演算するための基準車輪速度Vwbが、四つの車輪の車輪速度のうち二番目に低い車輪速度Vmedlo(異常輪以外の車輪の車輪速度のうち最も低い車輪速度Vmin′)に設定される。
【0079】
ステップ1360に於いては異常輪及び基準輪以外の車輪について、当該車輪の車輪速度Vi及び基準車輪速度Vwbに基づいて上記式1に従って駆動スリップ率Sdriが演算される。
【0080】
ステップ1370に於いては駆動スリップ率Sdriを演算するための基準車輪速度Vwbが、全ての車輪の車輪速度のうち最も低い車輪速度Vminに設定される。
【0081】
ステップ1380に於いては異常輪及び基準輪以外の車輪について、当該車輪の車輪速度Vi及び基準車輪速度Vwbに基づいて上記式1に従って駆動スリップ率Sdriが演算される。
【0082】
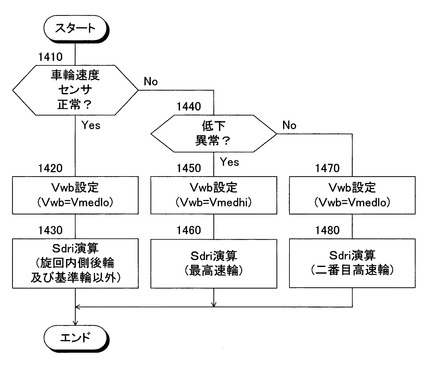
図5に示されている如く、ステップ1410に於いては全ての車輪速度センサ52FL〜52RRが正常であるか否かの判別が行われる。そして否定判別が行われたときには制御はステップ1440へ進み、肯定判別が行われたときには制御はステップ1420へ進む。
【0083】
ステップ1420に於いては駆動スリップ率Sdriを演算するための基準車輪速度Vwbが、旋回内側後輪を除く三つの車輪の車輪速度のうち最も低い車輪速度Vmedloに設定される。
【0084】
ステップ1430に於いては旋回内側後輪及び基準輪以外の車輪について、上記の式1に従って駆動スリップ率Sdriが演算される。
【0085】
ステップ1440に於いては車輪速度センサの異常が実際の車輪速度よりも低い値として車輪速度を検出する出力低下異常であるか否かの判別が行われる。そして否定判別が行われたときには制御はステップ1470へ進み、肯定判別が行われたときには制御はステップ1450へ進む。
【0086】
ステップ1450に於いては駆動スリップ率Sdriを演算するための基準車輪速度Vwbが、旋回内側後輪及び異常輪以外の車輪の車輪速度のうち低い方の車輪速度Vmedhiに設定される。
【0087】
ステップ1460に於いては旋回内側後輪、異常輪及び基準輪以外の車輪、即ち車輪速度が最も高い一つの車輪について、当該車輪の車輪速度Vi及び基準車輪速度Vwbに基づいて上記式1に従って駆動スリップ率Sdriが演算される。
【0088】
ステップ1470に於いては駆動スリップ率Sdriを演算するための基準車輪速度Vwbが、旋回内側後輪及び異常輪以外の車輪の車輪速度のうち低い方の車輪速度Vmedloに設定される。
【0089】
ステップ1480に於いては旋回内側後輪、異常輪及び基準輪以外の車輪、即ち車輪速度が二番目に高い車輪について、当該車輪の車輪速度Vi及び基準車輪速度Vwbに基づいて上記式1に従って駆動スリップ率Sdriが演算される。
【0090】
かくして第一の実施形態によれば、旋回補助制御を開始すべき状況になると、ステップ50、100、150に於いてそれぞれ否定判別、肯定判別、肯定判別が行われる。そしてステップ200及び250に於いて旋回内側後輪に対する制動力の付与が開始され、ステップ300又は500に於いて肯定判別が行われるまで旋回内側後輪の制動力が増大される。
【0091】
よって左右後輪の制動力差による旋回補助方向のヨーモーメントが車両に付与され、これにより車両の旋回が補助される。従って旋回補助制御による制動力の付与が行われない場合に比して車両の旋回性が向上される。
【0092】
またトラクション制御の何れか一つの制御対象車輪の駆動スリップが過大な状況になると、ステップ1050、1100、1250、1600に於いてそれぞれ否定判別、肯定判別、否定判別、肯定判別が行われる。そしてステップ1700に於いて当該車輪に対しトラクション制御による制動力の付与が開始され、ステップ1150に於いて肯定判別が行われるまで制動力の付与が継続され、これにより当該車輪の駆動スリップが低減される。
【0093】
車輪速度を検出する車輪速度センサ52FL〜52RRが正常であっても、旋回補助制御により旋回内側後輪に制動力が付与されているか否かに応じて基準車輪速度Vwbの設定や駆動スリップ率Sdriの演算が変更されなければならない。
【0094】
また車輪速度センサ52FL〜52RRに異常が生じることがあり、車輪速度センサに異常が生じると、それに応じて基準車輪速度Vwbの設定や駆動スリップ率Sdriの演算が変更されなければならない。
【0095】
第一の実施形態によれば、基準車輪速度Vwbの設定等は、図3乃至図5に示されたフローチャートに従って、旋回補助制御により制動力が付与されているか否か及び車輪速度センサに異常が生じているか否かに応じて変更される。
【0096】
例えば旋回補助制御による制御力の付与が実行されておらず、車輪速度センサ52FL〜52RRが正常であるときには、基準車輪速度Vwbは四つの車輪の車輪速度のうち最も低い車輪速度Vminに設定される。そしてこの場合のトラクション制御の制御対象車輪は基準輪以外の三つの車輪である。
【0097】
また旋回補助制御による制御力の付与が実行されていないが、車輪速度センサ52FL〜52RRの何れか一つが異常である場合がある。特に車輪速度センサの異常が低出力異常であるときには、基準車輪速度Vwbは四つの車輪の車輪速度のうち二番目に低い車輪速度Vmedloに設定される。そしてこの場合のトラクション制御の制御対象車輪は異常輪及び基準輪以外の二つの車輪である。
【0098】
また旋回補助制御による制御力の付与が実行されていないが、車輪速度センサの異常が高出力異常であるときには、基準車輪速度Vwbは、異常輪を除く三つの車輪の車輪速度(Vmin、Vmedlo、Vmedhi)のうち最も低い車輪速度Vminに設定される。そしてこの場合のトラクション制御の制御対象車輪は異常輪及び基準輪以外の二つの車輪である。
【0099】
また旋回補助制御による制御力の付与が実行されており、車輪速度センサ52FL〜52RRが正常であるときには、基準車輪速度Vwbは旋回内側後輪を除く三つの車輪の車輪速度(Vmedlo、Vmedhi、Vmax)のうち最も低い車輪速度Vmedloに設定される。そしてこの場合のトラクション制御の制御対象車輪は基準輪及び旋回内側後輪を除く二つの車輪である。
【0100】
また旋回補助制御による制御力の付与が実行されており、旋回内側後輪以外の車輪速度センサ52FL〜52RRの何れか一つが異常である場合がある。特に車輪速度センサの異常が出力低下異常であるときには、基準車輪速度Vwbは異常輪及び旋回内側後輪以外の二つの車輪の車輪速度(Vmedhi、Vmax)のうち低い方の車輪速度Vmedhiに設定される。そしてこの場合のトラクション制御の制御対象車輪は異常輪及び旋回内側後輪以外の二つの車輪のうち車輪速度が高い方の車輪である。
【0101】
また旋回補助制御による制御力の付与が実行されており、車輪速度センサの異常が高出力異常であるときには、基準車輪速度Vwbは異常輪及び旋回内側後輪以外の二つの車輪の車輪速度(Vmedlo、Vmedhi)のうち低い方の車輪速度Vmedloに設定される。そしてこの場合のトラクション制御の制御対象車輪は異常輪及び旋回内側後輪以外の二つの車輪のうち車輪速度が高い方の車輪である。
【0102】
従って第一の実施形態によれば、旋回補助制御により制動力が付与されているか否か及び車輪速度センサに異常が生じているか否かに応じて基準車輪速度Vwbの設定等を適切に行うことができる。特に旋回補助制御による制御力の付与が実行されており、旋回内側後輪以外の車輪の車輪速度センサが出力低下異常であるときに、基準車輪速度Vwbが車輪速度Vmedloに設定されることを防止し、トラクション制御が不適切に行われることを防止することができる。
【0103】
また第一の実施形態によれば、ステップ100に於ける許可条件の一つとしてa5の条件が設定されている。よって旋回内側後輪の車輪速度センサが異常であるときには、旋回補助制御により旋回内側後輪に制動力が付与される要求が生じても、旋回補助制御の許可条件は成立していないと判定される。従って旋回内側後輪の車輪速度センサが異常である状況に於いて旋回内側後輪に旋回補助制御による制動力の付与が開始されることを防止することができる。
【0104】
第二の実施形態
図6は本発明による車両の走行制御装置の第二の実施形態を示す概略構成図、図7及び図8はそれぞれ第二の実施形態に於ける旋回補助制御及びトラクション制御のルーチンを示すフローチャートである。
【0105】
尚図6に於いて、図1に示された部材に対応する部材には図1に於いて付された符号と同一の符号が付されている。また図7及び図8に於いて、それぞれ図2及び図3に示されたステップに対応するステップには図2及び図3に於いて付されたステップ番号と同一のステップ番号が付されている。
【0106】
この第二の実施形態に於いては、図6に示されている如く、各車輪には制動圧Pbi(i=fl、fr、rl、rr)、即ちホイールシリンダ46FL〜46RR内の圧力を検出する圧力センサ60FL〜60RRが設けられている。そして旋回補助制御により旋回内側後輪に付与される制動力は旋回内側後輪の制動圧が目標制動圧に制御されることによって制御される。
【0107】
図7に示されている如く、旋回補助制御はこの第二の実施形態に於いても第一の実施形態の場合と同様に実行される。しかしステップ100に於いては、前述のa1〜a4の全てが成立しているときに旋回補助制御の許可条件が成立していると判定される。即ち前述のa5は第二の実施形態に於いては旋回補助制御の許可条件の一つではない。
【0108】
またステップ500に於いては操舵角θの絶対値が大きいときには操舵角θの絶対値が小さいときに比して大きい値になるよう、操舵角θの絶対値に基づいて旋回内側後輪の目標制動圧Pbrintが演算される。そして旋回内側後輪の制動圧Pbrinがその目標制動圧Pbrintになったか否かの判別が行われる。更に否定判別が行われたときには制御は一旦終了され、肯定判別が行われたときには制御はステップ600へ進む。
【0109】
また図8に示されている如く、この第二の実施形態に於けるトラクション制御も第一の実施形態の場合と同様に実行される。しかしステップ1250に於いて否定判別が行われたときには制御はステップ1300へ進むが、肯定判別が行われたときには制御はステップ1500へ進む。
【0110】
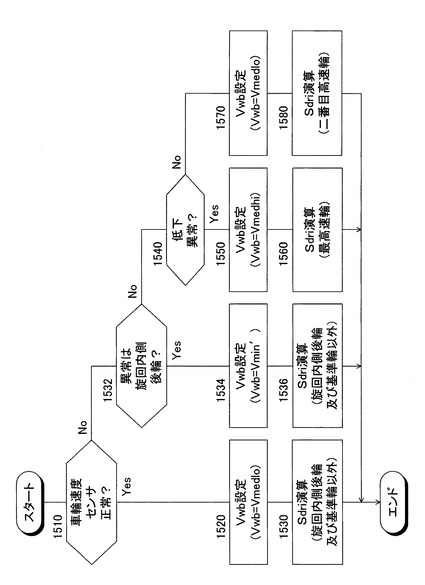
そしてステップ1500に於いては図9に示されたフローチャートに従って旋回補助制御により旋回内側後輪に制動力が付与されているときの基準車輪速度Vwbの設定及び駆動スリップ率Sdri(iはfl、fr、rl、rrの何れか)の演算が行われる。
【0111】
図9に示されている如く、トラクション制御のステップ1510〜1530及びステップ1540〜1580はそれぞれ第一の実施形態の場合と同様に実行される。しかしステップ1510に於いて肯定判別が行われたときには制御はステップ1520へ進むが、否定定判別が行われたときには制御はステップ1532へ進む。
【0112】
ステップ1532に於いては車輪速度センサが異常である車輪は旋回内側後輪であるか否かの判別が行われる。そして否定判別が行われたときには制御はステップ1540へ進み、肯定判別が行われたときには制御はステップ1534へ進む。
【0113】
ステップ1534に於いては駆動スリップ率Sdriを演算するための基準車輪速度Vwbが、旋回内側後輪を除く三つの車輪の車輪速度のうち最も低い車輪速度Vmin′に設定される。
【0114】
ステップ1536に於いては旋回内側後輪及び基準輪以外の二つの車輪について、上記の式1に従って駆動スリップ率Sdriが演算される。
【0115】
従って第二の実施形態によれば、第一の実施形態の場合と同様に、旋回補助制御により制動力が付与されているか否か及び車輪速度センサに異常が生じているか否かに応じて基準車輪速度Vwbの設定等を最適に行うことができる。特に旋回補助制御による制御力の付与が実行されており、旋回内側後輪以外の車輪の車輪速度センサが出力低下異常であるときに、基準車輪速度Vwbが車輪速度Vmedloに設定されることを防止し、トラクション制御が不適切に行われることを防止することができる。
【0116】
また第二の実施形態によれば、第一の実施形態に於けるa5はステップ100に於ける許可条件の一つとされていない。よって旋回内側後輪の車輪速度センサが異常であるときにも、旋回内側後輪の圧力センサが正常であれば。旋回補助制御により旋回内側後輪に制動力が付与される。
【0117】
また旋回補助制御による制御力の付与が実行されており、旋回内側後輪の車輪速度センサが異常であるときには、ステップ1510及び1532に於いてそれぞれ否定判別及び肯定判別が行われる。そしてステップ1534に於いて基準車輪速度Vwbが旋回内側後輪を除く三つの車輪の車輪速度のうち最も低い車輪速度Vmin′に設定される。
【0118】
従って旋回補助制御による制御力の付与が実行されており、旋回内側後輪の車輪速度センサが異常である場合に、基準車輪速度Vwbが輪速度Vmedhiに設定されることを防止し、トラクション制御が不適切に行われることを防止することができる。
【0119】
以上に於いては本発明を特定の実施形態について詳細に説明したが、本発明は上述の実施形態に限定されるものではなく、本発明の範囲内にて他の種々の実施形態が可能であることは当業者にとって明らかであろう。
【0120】
例えば上述の第一の実施形態に於いては、旋回補助制御は旋回内側後輪がロック状態になるまで旋回内側後輪に制動力を付与するようになっているが、旋回内側後輪の制動スリップ量又は制動スリップ率が基準値になるまで制動力が付与されるよう修正されてもよい。
【0121】
また上述の各実施形態に於いては、操舵角θの絶対値に基づいて旋回内側後輪の目標増圧勾配ΔPbrintが演算されることにより、目標増圧勾配が操舵角θの絶対値に応じて可変設定されるようになっているが、目標増圧勾配は一定であってもよい。
【0122】
また上述の各実施形態に於いては、所定の車輪の車輪速度がトラクション制御の基準車輪速度に設定されるようになっているが、所定の車輪の車輪速度に基づいて車両の重心に於ける車体速度が演算され、車体速度が基準車輪速度に設定されてもよい。また車両の重心に於ける車体速度に基づいて制御対象車輪の位置に於ける車体速度が演算され、それらの車体速度がそれぞれ対応する制御対象車輪の基準車輪速度に設定されてもよい。
【0123】
また上述の各実施形態に於いては、トラクション制御に於ける車輪の前後力の低減も車輪に制動力を付与することによって行われるようになっているが、駆動力を低減したり、駆動力を低減すると共に制動力を付与することによって行われてもよい。
【0124】
また上述の各実施形態に於いては、旋回補助制御は旋回内側後輪に制動力を付与するようになっているが、旋回内側前輪に制動力を付与するようになっていてもよい。また一つの旋回内輪に制動力を付与すると共に旋回外輪に駆動力を付与するようになっていてもよい。
【0125】
また上述の各実施形態に於いては、車両運動制御としてオーバーステア抑制制御及びアンダーステア抑制制御が行われるようになっているが、これらの制御が行われなくてもよい。
【符号の説明】
【0126】
10…エンジン、18…トランスファー、24…エンジン制御装置、26…選択スイッチ、28…4WD制御装置、30…前輪ディファレンシャル、36…後輪ディファレンシャル、42…制動装置、50…走行制御用電子制御装置、52FL〜52RR…車輪速度センサ、54…車速センサ、56…操舵角センサ、58…旋回補助スイッチ、60FL〜60RR…圧力センサ
【技術分野】
【0001】
本発明は、車両の走行制御装置に係り、更に詳細には旋回外輪に比して旋回内輪の前後力が小さくなるよう車輪の前後力を制御する旋回補助制御と、車輪の駆動スリップが過大であるときには当該車輪の前後力を低減することにより駆動スリップを低減するトラクション制御とを行う走行制御装置に係る。
【背景技術】
【0002】
旋回補助制御、例えば旋回内側後輪に制動力を付与することにより車両の旋回性能を向上させる制御は既に知られており、例えば下記の特許文献1に記載されている。またトラクション制御、例えば駆動スリップが過大な車輪に制動力を付与して駆動スリップを低減する制御も既によく知られている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平11−49020号公報
【発明の概要】
【0004】
〔発明が解決しようとする課題〕
旋回補助制御及びトラクション制御の制御対象車輪及び制御の内容は互いに異なり、互いに干渉しないので、旋回補助制御及びトラクション制御の両者が同時に実行される場合がある。
【0005】
旋回補助制御による制動力の付与が行われていない状況に於いてトラクション制御が実行される場合には、駆動スリップを判定するための基準車輪速度は四つの車輪の車輪速度のうち最も低い車輪速度に設定される。これに対し旋回補助制御による制動力の付与が行われている状況に於いてトラクション制御が実行される場合には、基準車輪速度は旋回補助制御により制動力が付与されている車輪を除く三つの車輪の車輪速度のうち最も低い車輪速度に設定される。
【0006】
一般に、車輪速度は車輪速度センサにより検出されるが、車輪速度センサに異常が生じる場合がある。そして車輪速度センサに異常が生じると、異常に起因してトラクション制御が不適切に実行される事態が生じる。例えば旋回補助制御により制動力が付与されている車輪以外の車輪速度センサに実際の車輪速度よりも低い値として車輪速度を検出する異常が生じた場合について考える。この場合には旋回補助制御により制動力が付与されている車輪の車輪速度及び異常な車輪速度センサにより検出される車輪速度が低い値になる。そのため基準車輪速度が旋回補助制御により制動力が付与されている車輪を除く三つの車輪の車輪速度のうち最も低い車輪速度に設定されると、基準車輪速度が過剰に低い値になるので、トラクション制御が不適切に実行されることになる。
【0007】
本発明は、旋回補助制御及びトラクション制御の両者が同時に実行される場合であって、車輪速度センサに実際の車輪速度よりも低い値として車輪速度を検出する異常が生じた場合に於ける上述の問題に着目してなされたものである。そして本発明の主要な課題は、旋回補助制御及びトラクション制御の両者が同時に実行される場合に、車輪速度を検出する装置の異常に起因して基準車輪速度が不適切な値になりトラクション制御が不適切に実行されることを防止することである。
【0008】
〔課題を解決するための手段及び発明の効果〕
上述の主要な課題は、本発明によれば、請求項1の構成、即ち一つの旋回内輪の前後力を低減することにより旋回外輪に比して旋回内輪の前後力が小さくなるよう車輪の前後力を制御する旋回補助制御と、車輪の駆動スリップが過大であるときには当該車輪の前後力を低減することにより駆動スリップを低減するトラクション制御とを行う四輪駆動車の走行制御装置に於いて、各車輪の車輪速度を検出する車輪速度検出手段を有し、前記旋回内輪以外の一つの車輪の車輪速度検出手段に実際の車輪速度よりも低い値として車輪速度を検出する異常が生じており且つ前記旋回補助制御が実行されているときには、前記旋回内輪を除く三つの車輪の車輪速度のうち二番目に低い車輪速度に基づいて車輪の駆動スリップを判定するための基準車輪速度を設定することを特徴とする車両の走行制御装置によって達成される。
【0009】
上記の構成によれば、旋回内輪を除く三つの車輪の車輪速度のうち二番目に低い車輪速度に基づいて車輪の駆動スリップを判定するための基準車輪速度が設定される。よって車輪速度検出手段に実際の車輪速度よりも低い値として車輪速度を検出する異常が生じており且つ旋回補助制御が実行されている場合に、基準車輪速度が過剰に低い値になりトラクション制御が不適切に実行されることを防止することができる。
また請求項1の構成によれば、旋回内輪を除く三つの車輪の車輪速度のうち二番目に低い車輪速度が解れば基準車輪速度を設定することができる。よって車輪速度検出手段に異常が生じている車輪を特定することなく基準車輪速度を設定することができる。
【0010】
また本発明によれば、上述の主要な課題を効果的に達成すべく、上記請求項1の構成に於いて、全ての車輪速度検出手段が正常であり且つ前記旋回補助制御が実行されているときには、前記旋回内輪を除く三つの車輪の車輪速度のうち最も低い車輪速度に基づいて車輪の駆動スリップを判定するための基準車輪速度を設定するよう構成される(請求項2の構成)。
【0011】
上記の構成によれば、全ての車輪速度検出手段が正常であり且つ前記旋回補助制御が実行されている場合には、基準車輪速度を適正な値に設定することができる。
【0012】
また本発明によれば、上述の主要な課題を効果的に達成すべく、上記請求項1の構成に於いて、前記旋回内輪以外の一つの車輪の車輪速度検出手段に実際の車輪速度よりも高い値として車輪速度を検出する異常が生じている状況にて前記旋回補助制御が実行されているときには、前記旋回内輪及び車輪速度検出手段が異常な車輪を除く二つの車輪の車輪速度のうち低い方の車輪速度に基づいて車輪の駆動スリップを判定するための基準車輪速度を設定し、車輪速度検出手段が異常な車輪について車輪の駆動スリップを判定しないよう構成される(請求項3の構成)。
【0013】
上記の構成によれば、旋回内輪以外の一つの車輪の車輪速度検出手段に実際の車輪速度よりも高い値として車輪速度を検出する異常が生じている場合にも、基準車輪速度を適正な値に設定することができる。
【0014】
また本発明によれば、上述の主要な課題を効果的に達成すべく、上記請求項1乃至3の何れか一つの構成に於いて、各車輪の制動力を検出する制動力検出手段を有し、前記旋回補助制御に於いては前記旋回内輪の制動力に基づいて前記旋回内輪の前後力を低減し、全ての車輪速度検出手段が正常であり且つ前記旋回補助制御が実行されているとき、又は前記旋回内輪の車輪の車輪速度検出手段に実際の車輪速度よりも低い値として車輪速度を検出する異常が生じており且つ前記旋回補助制御が実行されているときには、前記旋回内輪を除く三つの車輪の車輪速度のうち最も低い車輪速度に基づいて車輪の駆動スリップを判定するための基準車輪速度を設定するよう構成される(請求項4の構成)。
【0015】
上記の構成によれば、旋回内輪の制動力に基づいて旋回補助制御による旋回内輪の前後力の低減が行われる車両に於いて、車輪速度検出手段が正常であるか否かに関係なく基準車輪速度を適正な値に設定することができる。
【0016】
尚本願に於いて、車輪の「前後力」は車両の進行方向を正とする制駆動力である。そして前後力の低減は車両の進行方向の前後力の大きさを小さくすることのみならず、車両の進行方向の前後力を発生している車輪に車両の進行方向とは逆方向の前後力を付加することを含むものである。
【0017】
また本願に於いて、「旋回内側後輪」は車両の進行方向に対し後ろ側にある旋回内輪を意味する。よって「旋回内側後輪」の「後輪」は車両が前進するときには車両の後輪であるが、車両が後進するときには車両の前輪である。
【0018】
〔課題解決手段の好ましい態様〕
本発明の一つの好ましい態様によれば、上記請求項1乃至4の構成に於いて、旋回補助制御は旋回内輪に制動力を付与することにより車両に旋回補助方向のヨーモーメントを付与する制御であるよう構成される(好ましい態様1)。
【0019】
本発明の他の一つの好ましい態様によれば、上記好ましい態様1の構成に於いて、旋回内輪は旋回内側後輪であるよう構成される(好ましい態様2)。
【0020】
本発明の他の一つの好ましい態様によれば、上記請求項1乃至4の構成に於いて、トラクション制御は制御対象車輪に制動力を付与することにより当該車輪の駆動スリップを低減する制御であるよう構成される(好ましい態様3)。
【0021】
本発明の他の一つの好ましい態様によれば、上記請求項1乃至3の構成に於いて、旋回補助制御に於いては車輪速度に基づいて旋回内輪の前後力を低減するよう構成される(好ましい態様4)。
【0022】
本発明の他の一つの好ましい態様によれば、上記好ましい態様4の構成に於いて、旋回内輪の車輪速度検出手段が異常であるときには、旋回補助制御による旋回内輪の前後力の低減を行わないよう構成される(好ましい態様5)。
【0023】
本発明の他の一つの好ましい態様によれば、上記請求項2の構成に於いて、前記三つの車輪のうち最も車輪速度が高い車輪及び二番目に車輪速度が高い車輪について駆動スリップを判定するよう構成される(好ましい態様6)。
【0024】
本発明の他の一つの好ましい態様によれば、上記請求項3の構成に於いて、前記二つの車輪のうち車輪速度が高い方の車輪について駆動スリップを判定するよう構成される(好ましい態様7)。
【0025】
本発明の他の一つの好ましい態様によれば、上記請求項1乃至4の構成に於いて、車両はオフロード車であるよう構成される(好ましい態様8)。
【0026】
本発明の他の一つの好ましい態様によれば、上記好ましい態様8の構成に於いて、旋回補助制御は旋回内側後輪がロック状態になるまで旋回内側後輪に制動力を付与するよう構成される(好ましい態様9)。
【図面の簡単な説明】
【0027】
【図1】本発明による車両の走行制御装置の第一の実施形態を示す概略構成図である。
【図2】第一の実施形態に於ける旋回補助制御のルーチンを示すフローチャートである。
【図3】第一の実施形態に於けるトラクション制御のルーチンを示すフローチャートである。
【図4】第一の実施形態のトラクション制御に於いて旋回補助制御により旋回内側後輪に制動力が付与されていないときの基準車輪速度Vwb及び駆動スリップ率Sdriの演算ルーチンを示すフローチャートである。
【図5】第一の実施形態のトラクション制御に於いて旋回補助制御により旋回内側後輪に制動力が付与されているときの基準車輪速度Vwb及び駆動スリップ率Sdriの演算ルーチンを示すフローチャートである。
【図6】本発明による車両の走行制御装置の第二の実施形態を示す概略構成図である。
【図7】第二の実施形態に於ける旋回補助制御のルーチンを示すフローチャートである。
【図8】第二の実施形態に於けるトラクション制御のルーチンを示すフローチャートである。
【図9】第二の実施形態のトラクション制御に於いて旋回補助制御により旋回内側後輪に制動力が付与されているときの基準車輪速度Vwb及び駆動スリップ率Sdriの演算ルーチンを示すフローチャートである。
【発明を実施するための形態】
【0028】
以下に添付の図を参照しつつ、本発明を好ましい幾つかの実施形態について詳細に説明する。
【0029】
第一の実施形態
図1は本発明による車両の走行制御装置の第一の実施形態を示す概略構成図である。
【0030】
図1に於いて、100は車両102に搭載された走行制御装置を全体的に示している。また10はエンジンを示しており、エンジン10の駆動力はトルクコンバータ12及びトランスミッション14を介して出力軸16へ伝達される。出力軸16の駆動力は駆動状態を切替えるトランスファー18により前輪用駆動軸20若しくは後輪用駆動軸22へ伝達される。エンジン10の出力は運転者により操作されるアクセルペダル23の踏み込み量等に応じてエンジン制御装置24により制御される。
【0031】
またトランスファー18は駆動状態を4WD状態と2WD状態とに切替えるアクチュエータを含み、該アクチュエータは運転者により操作される選択スイッチ(SW)26に応答して4WD制御装置28により制御される。選択スイッチ26はH4位置、H2位置、N位置、L4位置に切替えられるようになっている。
【0032】
選択スイッチ26がH4位置にあるときには、トランスファー18は出力軸16の駆動力を前輪用駆動軸20及び後輪用駆動軸22へ伝達する4WD位置に設定される。これに対し選択スイッチ26がH2位置にあるときには、トランスファー18は出力軸16の駆動力を後輪用駆動軸22のみへ伝達する2WD位置に設定される。選択スイッチ26がN位置にあるときには、トランスファー18は出力軸16の駆動力を前輪用駆動軸20及び後輪用駆動軸22の何れにも伝達しない位置に設定される。更に選択スイッチ26がL4位置にあるときには、トランスファー18はH4位置の場合よりも低車速高トルク用の駆動力として出力軸16の駆動力を前輪用駆動軸20及び後輪用駆動軸22へ伝達する4WD位置に設定される。
【0033】
図1に示されている如く、4WD制御装置28は選択スイッチ26より入力される指令信号に基づきトランスファー18に対する4WD制御装置28の指令位置が2WD位置及び4WD位置の何れであるかを示す信号をエンジン制御装置24へ出力する。エンジン制御装置24は4WD制御装置28の指令位置に応じてエンジン10の出力を制御する。
【0034】
前輪用駆動軸20の駆動力は前輪ディファレンシャル30により左前輪車軸32L及び右前輪車軸32Rへ伝達され、これにより左右の前輪34FL及び34FRが回転駆動される。同様に後輪用駆動軸22の駆動力は後輪ディファレンシャル36により左後輪車軸38L及び右後輪車軸38Rへ伝達され、これにより左右の後輪40RL及び40RRが回転駆動される。
【0035】
左右の前輪34FL、34FR及び左右の後輪40RL、40RRの制動力は制動装置42の油圧回路44により対応するホイールシリンダ46FL、46FR、46RL、46RRの制動圧が制御されることによって制御される。図には示されていないが、油圧回路44はリザーバ、オイルポンプ、種々の弁装置等を含んでいる。各ホイールシリンダの制動圧は通常時には運転者によるブレーキペダル47の踏み込み操作に応じて駆動されるマスタシリンダ48により制御され、また必要に応じて後に詳細に説明する如く走行制御用電子制御装置50により制御される。
【0036】
電子制御装置50には車輪速度センサ52FL、52FR、52RL、52RRより左右前輪及び左右後輪の車輪速度Vi(i=fl、fr、rl、rr)を示す信号が入力される。また電子制御装置50には車速センサ54より車速Vを示す信号が入力され、操舵角センサ56より操舵角θを示す信号が入力される。尚操舵角センサ56は車両の左旋回方向を正として操舵角を検出する。
【0037】
また電子制御装置50には選択スイッチ26よりトランスファー18が何れの位置にあるかを示す信号が入力され、また車両の乗員により操作される旋回補助スイッチ58より旋回補助スイッチがオンか否かを示す信号が入力される。
【0038】
またエンジン制御装置24にはアクセルペダル23に設けられた図1には示されていないアクセル開度センサよりアクセル開度Accを示す信号が入力される。尚エンジン制御装置24、4WD制御装置28、電子制御装置50は実際には例えばCPU、ROM、RAM、入出力装置を含む一つのマイクロコンピュータ及び駆動回路にて構成されていてよい。
【0039】
後に詳細に説明する如く、電子制御装置50は旋回補助スイッチ58がオンであるときには、旋回補助制御による制御力の付与を実行すべきか否かを判定する。そして電子制御装置50は実行すべきと判定したときには、旋回内側後輪に制動力を付与して車両に旋回を補助するヨーモーメントを付与する。
【0040】
また電子制御装置50は車両が駆動状態にあるときには、トラクション制御の制御対象車輪について駆動スリップ率Sdri(i=fl、fr、rl、rr)を演算する。そして電子制御装置50は駆動スリップ率が過大な車輪があるときには、当該車輪に駆動スリップ率に応じた制動力を付与し、これにより過大な駆動スリップを低減するトラクション制御を行う。
【0041】
駆動スリップ率Sdriは当該車輪の車輪速度Vi及び基準車輪速度Vwbに基づいて下記の式1に従って演算される。
Sdri=(Vi−Vwb)/Vwb ……(1)
【0042】
基準車輪速度Vwb及びトラクション制御の制御対象車輪は、図3乃至図5に示されたフローチャートに従って、旋回補助制御による制動力の付与が実行されているか否か及び何れかの車輪速度センサに異常が生じているか否かに応じて異なる態様にて設定される。尚これ以降の説明に於いては、車輪速度センサ52FL〜52RRにより検出される車輪速度Viはその低い順にVmin、Vmedlo、Vmedhi、Vmaxとされる。
【0043】
また車輪速度センサにより検出される車輪速度があり得ない値であるときに、車輪速度センサに異常が生じていると判定される。例えば車両が制動状態になく、他の車輪速度センサによる検出車輪速度が走行判定の基準値以上である状況に於いて、一つの車輪速度センサによる検出車輪速度が異常判定の基準値未満であるときに、その車輪速度センサに低出力の異常が生じていると判定される。この異常の代表的な例は導線の断線や可動部材の固着の異常である。
【0044】
また車両が加速状態になく、他の車輪速度センサによる検出車輪速度が走行判定の基準値以下である状況に於いて、一つの車輪速度センサによる検出車輪速度が異常判定の基準値よりも高いときに、その車輪速度センサに高出力の異常が生じていると判定される。この異常の代表的な例は導線のショートの異常である。
【0045】
尚電子制御装置50は、旋回内側後輪の車輪速度センサに異常が生じているときには、旋回補助制御による制動力の付与を行わない。また電子制御装置50は、二つ以上の車輪速度センサに異常が生じているときには、トラクション制御による制動力の付与を行わない。
【0046】
更に電子制御装置50は図には示されていないヨーレートセンサ等により検出される車両の状態量に基づいて車両が過大なオーバーステア状態又はアンダーステア状態にあるか否か、即ち車両運動制御による制御力の付与が必要であるか否かを判定する。そして電子制御装置50は制御力の付与が必要であると判定したときには、車両運動制御の制御対象車輪に制動力を付与して車両の旋回運動を安定化させるオーバーステア抑制制御又はアンダーステア抑制制御を行う。
【0047】
特にオーバーステア抑制制御に於いては、少なくとも旋回外側前輪に制動力が付与されることにより、車両に旋回抑制方向のヨーモーメントが付与されると共に車両が減速される。またアンダーステア抑制制御に於いては、少なくとも左右後輪に制動力が付与され、旋回内側後輪の制動力が旋回外側後輪の制動力よりも高くされることにより、車両が減速されると共に車両に旋回促進方向のヨーモーメントが付与される。
【0048】
次に図2に示されたフローチャートを参照して第一の実施形態に於ける旋回補助制御のルーチンについて説明する。尚図2に示されたフローチャートによる制御は図には示されていないイグニッションスイッチの閉成により開始され、所定の時間毎に繰返し実行される。
【0049】
まずステップ50に於いては旋回補助制御による制動力の付与、即ち旋回内側後輪に対する制動力の付与が行われているか否かの判別が行われる。そして肯定判別が行われたときには制御はステップ300へ進み、否定判別が行われたときには制御はステップ100へ進む。
【0050】
ステップ100に於いては旋回補助制御による制動力の付与の許可条件が成立しているか否かの判別が行われる。そして否定判別が行われたときには制御は一旦終了され、肯定判別が行われたときには制御はステップ150へ進む。
【0051】
この場合以下の全ての条件が成立しているときに旋回補助制御による制動力の付与の許可条件が成立していると判定されてよい。
(a1)制動装置42が正常で、車両の運動制御を正常に実行可能である。
(a2)選択スイッチ26がL4位置に設定されている。
(a3)旋回補助スイッチ58がオン位置に設定されている。
(a4)車両の運動制御による制動力の付与が実行されていない。
(a5)旋回内側後輪の車輪速度センサが正常である。
【0052】
ステップ150に於いては旋回補助制御による制動力の付与の開始可条件が成立しているか否かの判別が行われる。そして否定判別が行われたときには制御が一旦終了され、肯定判別が行われたときには制御はステップ200へ進む。
【0053】
この場合(b1)操舵角θの絶対値が基準値θtas以上である、及び(b2)アクセルペダル23が踏み込まれている、の二つの条件が成立しているときに旋回補助制御による制動力の付与の開始条件が成立していると判定されてよい。尚基準値θtasは正の定数であってもよいが、車速Vが低いときには車速Vが高いときに比して大きい値になるよう、車速Vに応じて可変設定されてもよい。
【0054】
ステップ200に於いては操舵角θの絶対値が大きいときには操舵角θの絶対値が小さいときに比して大きい値になるよう、操舵角θの絶対値に基づいて旋回内側後輪の目標増圧勾配ΔPbrintが演算される。尚目標増圧勾配がΔPbrintは車速Vが低いときには車速Vが高いときに比して大きい値になるよう、車速Vにも応じて可変設定されてもよい。
【0055】
ステップ250に於いては旋回内側後輪の増圧勾配が目標増圧勾配ΔPbrintになるよう、旋回内側後輪の制動圧が制御され、これにより旋回内側後輪に対する制動力の付与が開始される。
【0056】
ステップ300に於いては旋回補助制御による制動力の付与の終了条件が成立しているか否かの判別が行われる。そして否定判別が行われたときには制御はステップ500へ進み、肯定判別が行われたときには制御はステップ400へ進む。
【0057】
この場合下記の何れかの条件が成立しているときに旋回補助制御による制動力の付与の終了条件が成立していると判定されてよい。
(c1)操舵角θの絶対値が制御終了の基準値θtae(正の定数)以下になった。
(c2)旋回補助スイッチ62がオフ位置に切替えられた。
(c3)挙動制御による制動力の付与が必要になった。
(c4)車両の運動制御を正常に実行できなくなった。
(c5)旋回内側後輪の車輪速度センサが異常になった。
【0058】
ステップ400に於いては旋回内側後輪の制動圧が低減され、これにより旋回内側後輪に対する制動力の付与が終了される。
【0059】
ステップ500に於いては旋回内側後輪の制動スリップ率Sbrinが演算され、制動スリップ率Sbrinに基づいて旋回内側後輪がロック状態にあるか否かの判別が行われる。そして否定判別が行われたときには制御が一旦終了され、肯定判別が行われたときには制御はステップ600へ進む。
【0060】
ステップ600に於いては旋回内側後輪の制動圧の増大が停止され、これにより旋回内側後輪の制動力の増大が停止される。
【0061】
次に図3に示されたフローチャートを参照して第一の実施形態に於けるトラクション制御のルーチンについて説明する。尚図3に示されたフローチャートによる制御も図には示されていないイグニッションスイッチの閉成により開始され、所定の時間毎に繰返し実行される。
【0062】
まずステップ1050に於いてはトラクション制御による制動力の付与が行われているか否かの判別が行われ、肯定判別が行われたときには制御はステップ1150へ進み、否定判別が行われたときには制御はステップ1100へ進む。
【0063】
ステップ1100に於いてはトラクション制御の許可条件が成立しているか否かの判別が行われ、否定判別が行われたときには制御は一旦終了され、肯定判別が行われたときには制御はステップ1250へ進む。
【0064】
この場合以下の全ての条件が成立しているときにトラクション制御の許可条件が成立していると判定されてよい。
(d1)制動装置42が正常で、トラクション制御を正常に実行可能である。
(d2)アクセル開度Accが許可判定の基準値(正の定数)以上である。
(d3)二つ以上の車輪速度センサに異常が生じていない。
【0065】
ステップ1150に於いてはトラクション制御の終了条件が成立しているか否かの判別が行われ、否定判別が行われたときには制御はステップ1250へ進み、肯定判別が行われたときには制御はステップ1200へ進む。
【0066】
この場合下記の何れかの条件が成立しているときにトラクション制御の終了条件が成立していると判定されてよい。
(e1)駆動スリップ率Sdriが制御終了基準値Sdre(正の定数)以下になった。
(e2)制動装置42が異常で、トラクション制御を正常に実行できなくなった。
(e3))アクセル開度Accが許可判定の基準値未満になった。
(e4)二つ以上の車輪速度センサに異常が生じた。
【0067】
ステップ1200に於いてはトラクション制御による制動力が付与される制御対象車輪の制動圧が0に低減され、これによりトラクション制御の制御対象車輪に対する制動力の付与が終了される。
【0068】
ステップ1250に於いては旋回補助制御により旋回内側後輪に制動力が付与されているか否かの判別が行われ、肯定判別が行われたときには制御はステップ1400へ進み、否定判別が行われたときには制御はステップ1300へ進む。
【0069】
ステップ1300に於いては図4に示されたフローチャートに従って旋回補助制御により旋回内側後輪に制動力が付与されていないときの基準車輪速度Vwb及び駆動スリップ率Sdri(iはfl、fr、rl、rrの何れか)が演算される。
【0070】
ステップ1400に於いては図5に示されたフローチャートに従って旋回補助制御により旋回内側後輪に制動力が付与されているときの基準車輪速度Vwb及び駆動スリップ率Sdriが演算される。
【0071】
ステップ1600に於いては駆動スリップ率Sdriが基準値Sdrs以上であるか否かの判別により、当該車輪の制動圧を増大させて駆動スリップを低減する必要があるか否かの判別が行われる。そして否定判別が行われたときには制御は一旦終了され、肯定判別が行われたときには制御はステップ1700へ進む。
【0072】
尚、基準値Sdrsは正の定数であってもよいが、車速Vが低いときには車速Vが高いときに比して大きい値になるよう、車速Vに応じて可変設定されてもよい。
【0073】
ステップ1700に於いては当該車輪の制動圧が増大され、これにより当該車輪の車輪速度が低下されることにより駆動スリップが低減される。
【0074】
図4に示されている如く、ステップ1310に於いては全ての車輪速度センサ52FL〜52RRが正常であるか否かの判別が行われる。そして否定判別が行われたときには制御はステップ1340へ進み、肯定判別が行われたときには制御はステップ1320へ進む。
【0075】
ステップ1320に於いては駆動スリップ率Sdriを演算するための基準車輪速度Vwbが、全ての車輪の車輪速度のうち最も低い車輪速度Vminに設定される。
【0076】
ステップ1330に於いては基準輪以外の三つの車輪について、当該車輪の車輪速度Vi及び基準車輪速度Vwbに基づいて上記式1に従って駆動スリップ率Sdriが演算される。
【0077】
ステップ1340に於いては車輪速度センサの異常が実際の車輪速度よりも低い値として車輪速度を検出する出力低下異常であるか否かの判別が行われる。そして否定判別が行われたときには制御はステップ1370へ進み、肯定判別が行われたときには制御はステップ1350へ進む。
【0078】
ステップ1350に於いては駆動スリップ率Sdriを演算するための基準車輪速度Vwbが、四つの車輪の車輪速度のうち二番目に低い車輪速度Vmedlo(異常輪以外の車輪の車輪速度のうち最も低い車輪速度Vmin′)に設定される。
【0079】
ステップ1360に於いては異常輪及び基準輪以外の車輪について、当該車輪の車輪速度Vi及び基準車輪速度Vwbに基づいて上記式1に従って駆動スリップ率Sdriが演算される。
【0080】
ステップ1370に於いては駆動スリップ率Sdriを演算するための基準車輪速度Vwbが、全ての車輪の車輪速度のうち最も低い車輪速度Vminに設定される。
【0081】
ステップ1380に於いては異常輪及び基準輪以外の車輪について、当該車輪の車輪速度Vi及び基準車輪速度Vwbに基づいて上記式1に従って駆動スリップ率Sdriが演算される。
【0082】
図5に示されている如く、ステップ1410に於いては全ての車輪速度センサ52FL〜52RRが正常であるか否かの判別が行われる。そして否定判別が行われたときには制御はステップ1440へ進み、肯定判別が行われたときには制御はステップ1420へ進む。
【0083】
ステップ1420に於いては駆動スリップ率Sdriを演算するための基準車輪速度Vwbが、旋回内側後輪を除く三つの車輪の車輪速度のうち最も低い車輪速度Vmedloに設定される。
【0084】
ステップ1430に於いては旋回内側後輪及び基準輪以外の車輪について、上記の式1に従って駆動スリップ率Sdriが演算される。
【0085】
ステップ1440に於いては車輪速度センサの異常が実際の車輪速度よりも低い値として車輪速度を検出する出力低下異常であるか否かの判別が行われる。そして否定判別が行われたときには制御はステップ1470へ進み、肯定判別が行われたときには制御はステップ1450へ進む。
【0086】
ステップ1450に於いては駆動スリップ率Sdriを演算するための基準車輪速度Vwbが、旋回内側後輪及び異常輪以外の車輪の車輪速度のうち低い方の車輪速度Vmedhiに設定される。
【0087】
ステップ1460に於いては旋回内側後輪、異常輪及び基準輪以外の車輪、即ち車輪速度が最も高い一つの車輪について、当該車輪の車輪速度Vi及び基準車輪速度Vwbに基づいて上記式1に従って駆動スリップ率Sdriが演算される。
【0088】
ステップ1470に於いては駆動スリップ率Sdriを演算するための基準車輪速度Vwbが、旋回内側後輪及び異常輪以外の車輪の車輪速度のうち低い方の車輪速度Vmedloに設定される。
【0089】
ステップ1480に於いては旋回内側後輪、異常輪及び基準輪以外の車輪、即ち車輪速度が二番目に高い車輪について、当該車輪の車輪速度Vi及び基準車輪速度Vwbに基づいて上記式1に従って駆動スリップ率Sdriが演算される。
【0090】
かくして第一の実施形態によれば、旋回補助制御を開始すべき状況になると、ステップ50、100、150に於いてそれぞれ否定判別、肯定判別、肯定判別が行われる。そしてステップ200及び250に於いて旋回内側後輪に対する制動力の付与が開始され、ステップ300又は500に於いて肯定判別が行われるまで旋回内側後輪の制動力が増大される。
【0091】
よって左右後輪の制動力差による旋回補助方向のヨーモーメントが車両に付与され、これにより車両の旋回が補助される。従って旋回補助制御による制動力の付与が行われない場合に比して車両の旋回性が向上される。
【0092】
またトラクション制御の何れか一つの制御対象車輪の駆動スリップが過大な状況になると、ステップ1050、1100、1250、1600に於いてそれぞれ否定判別、肯定判別、否定判別、肯定判別が行われる。そしてステップ1700に於いて当該車輪に対しトラクション制御による制動力の付与が開始され、ステップ1150に於いて肯定判別が行われるまで制動力の付与が継続され、これにより当該車輪の駆動スリップが低減される。
【0093】
車輪速度を検出する車輪速度センサ52FL〜52RRが正常であっても、旋回補助制御により旋回内側後輪に制動力が付与されているか否かに応じて基準車輪速度Vwbの設定や駆動スリップ率Sdriの演算が変更されなければならない。
【0094】
また車輪速度センサ52FL〜52RRに異常が生じることがあり、車輪速度センサに異常が生じると、それに応じて基準車輪速度Vwbの設定や駆動スリップ率Sdriの演算が変更されなければならない。
【0095】
第一の実施形態によれば、基準車輪速度Vwbの設定等は、図3乃至図5に示されたフローチャートに従って、旋回補助制御により制動力が付与されているか否か及び車輪速度センサに異常が生じているか否かに応じて変更される。
【0096】
例えば旋回補助制御による制御力の付与が実行されておらず、車輪速度センサ52FL〜52RRが正常であるときには、基準車輪速度Vwbは四つの車輪の車輪速度のうち最も低い車輪速度Vminに設定される。そしてこの場合のトラクション制御の制御対象車輪は基準輪以外の三つの車輪である。
【0097】
また旋回補助制御による制御力の付与が実行されていないが、車輪速度センサ52FL〜52RRの何れか一つが異常である場合がある。特に車輪速度センサの異常が低出力異常であるときには、基準車輪速度Vwbは四つの車輪の車輪速度のうち二番目に低い車輪速度Vmedloに設定される。そしてこの場合のトラクション制御の制御対象車輪は異常輪及び基準輪以外の二つの車輪である。
【0098】
また旋回補助制御による制御力の付与が実行されていないが、車輪速度センサの異常が高出力異常であるときには、基準車輪速度Vwbは、異常輪を除く三つの車輪の車輪速度(Vmin、Vmedlo、Vmedhi)のうち最も低い車輪速度Vminに設定される。そしてこの場合のトラクション制御の制御対象車輪は異常輪及び基準輪以外の二つの車輪である。
【0099】
また旋回補助制御による制御力の付与が実行されており、車輪速度センサ52FL〜52RRが正常であるときには、基準車輪速度Vwbは旋回内側後輪を除く三つの車輪の車輪速度(Vmedlo、Vmedhi、Vmax)のうち最も低い車輪速度Vmedloに設定される。そしてこの場合のトラクション制御の制御対象車輪は基準輪及び旋回内側後輪を除く二つの車輪である。
【0100】
また旋回補助制御による制御力の付与が実行されており、旋回内側後輪以外の車輪速度センサ52FL〜52RRの何れか一つが異常である場合がある。特に車輪速度センサの異常が出力低下異常であるときには、基準車輪速度Vwbは異常輪及び旋回内側後輪以外の二つの車輪の車輪速度(Vmedhi、Vmax)のうち低い方の車輪速度Vmedhiに設定される。そしてこの場合のトラクション制御の制御対象車輪は異常輪及び旋回内側後輪以外の二つの車輪のうち車輪速度が高い方の車輪である。
【0101】
また旋回補助制御による制御力の付与が実行されており、車輪速度センサの異常が高出力異常であるときには、基準車輪速度Vwbは異常輪及び旋回内側後輪以外の二つの車輪の車輪速度(Vmedlo、Vmedhi)のうち低い方の車輪速度Vmedloに設定される。そしてこの場合のトラクション制御の制御対象車輪は異常輪及び旋回内側後輪以外の二つの車輪のうち車輪速度が高い方の車輪である。
【0102】
従って第一の実施形態によれば、旋回補助制御により制動力が付与されているか否か及び車輪速度センサに異常が生じているか否かに応じて基準車輪速度Vwbの設定等を適切に行うことができる。特に旋回補助制御による制御力の付与が実行されており、旋回内側後輪以外の車輪の車輪速度センサが出力低下異常であるときに、基準車輪速度Vwbが車輪速度Vmedloに設定されることを防止し、トラクション制御が不適切に行われることを防止することができる。
【0103】
また第一の実施形態によれば、ステップ100に於ける許可条件の一つとしてa5の条件が設定されている。よって旋回内側後輪の車輪速度センサが異常であるときには、旋回補助制御により旋回内側後輪に制動力が付与される要求が生じても、旋回補助制御の許可条件は成立していないと判定される。従って旋回内側後輪の車輪速度センサが異常である状況に於いて旋回内側後輪に旋回補助制御による制動力の付与が開始されることを防止することができる。
【0104】
第二の実施形態
図6は本発明による車両の走行制御装置の第二の実施形態を示す概略構成図、図7及び図8はそれぞれ第二の実施形態に於ける旋回補助制御及びトラクション制御のルーチンを示すフローチャートである。
【0105】
尚図6に於いて、図1に示された部材に対応する部材には図1に於いて付された符号と同一の符号が付されている。また図7及び図8に於いて、それぞれ図2及び図3に示されたステップに対応するステップには図2及び図3に於いて付されたステップ番号と同一のステップ番号が付されている。
【0106】
この第二の実施形態に於いては、図6に示されている如く、各車輪には制動圧Pbi(i=fl、fr、rl、rr)、即ちホイールシリンダ46FL〜46RR内の圧力を検出する圧力センサ60FL〜60RRが設けられている。そして旋回補助制御により旋回内側後輪に付与される制動力は旋回内側後輪の制動圧が目標制動圧に制御されることによって制御される。
【0107】
図7に示されている如く、旋回補助制御はこの第二の実施形態に於いても第一の実施形態の場合と同様に実行される。しかしステップ100に於いては、前述のa1〜a4の全てが成立しているときに旋回補助制御の許可条件が成立していると判定される。即ち前述のa5は第二の実施形態に於いては旋回補助制御の許可条件の一つではない。
【0108】
またステップ500に於いては操舵角θの絶対値が大きいときには操舵角θの絶対値が小さいときに比して大きい値になるよう、操舵角θの絶対値に基づいて旋回内側後輪の目標制動圧Pbrintが演算される。そして旋回内側後輪の制動圧Pbrinがその目標制動圧Pbrintになったか否かの判別が行われる。更に否定判別が行われたときには制御は一旦終了され、肯定判別が行われたときには制御はステップ600へ進む。
【0109】
また図8に示されている如く、この第二の実施形態に於けるトラクション制御も第一の実施形態の場合と同様に実行される。しかしステップ1250に於いて否定判別が行われたときには制御はステップ1300へ進むが、肯定判別が行われたときには制御はステップ1500へ進む。
【0110】
そしてステップ1500に於いては図9に示されたフローチャートに従って旋回補助制御により旋回内側後輪に制動力が付与されているときの基準車輪速度Vwbの設定及び駆動スリップ率Sdri(iはfl、fr、rl、rrの何れか)の演算が行われる。
【0111】
図9に示されている如く、トラクション制御のステップ1510〜1530及びステップ1540〜1580はそれぞれ第一の実施形態の場合と同様に実行される。しかしステップ1510に於いて肯定判別が行われたときには制御はステップ1520へ進むが、否定定判別が行われたときには制御はステップ1532へ進む。
【0112】
ステップ1532に於いては車輪速度センサが異常である車輪は旋回内側後輪であるか否かの判別が行われる。そして否定判別が行われたときには制御はステップ1540へ進み、肯定判別が行われたときには制御はステップ1534へ進む。
【0113】
ステップ1534に於いては駆動スリップ率Sdriを演算するための基準車輪速度Vwbが、旋回内側後輪を除く三つの車輪の車輪速度のうち最も低い車輪速度Vmin′に設定される。
【0114】
ステップ1536に於いては旋回内側後輪及び基準輪以外の二つの車輪について、上記の式1に従って駆動スリップ率Sdriが演算される。
【0115】
従って第二の実施形態によれば、第一の実施形態の場合と同様に、旋回補助制御により制動力が付与されているか否か及び車輪速度センサに異常が生じているか否かに応じて基準車輪速度Vwbの設定等を最適に行うことができる。特に旋回補助制御による制御力の付与が実行されており、旋回内側後輪以外の車輪の車輪速度センサが出力低下異常であるときに、基準車輪速度Vwbが車輪速度Vmedloに設定されることを防止し、トラクション制御が不適切に行われることを防止することができる。
【0116】
また第二の実施形態によれば、第一の実施形態に於けるa5はステップ100に於ける許可条件の一つとされていない。よって旋回内側後輪の車輪速度センサが異常であるときにも、旋回内側後輪の圧力センサが正常であれば。旋回補助制御により旋回内側後輪に制動力が付与される。
【0117】
また旋回補助制御による制御力の付与が実行されており、旋回内側後輪の車輪速度センサが異常であるときには、ステップ1510及び1532に於いてそれぞれ否定判別及び肯定判別が行われる。そしてステップ1534に於いて基準車輪速度Vwbが旋回内側後輪を除く三つの車輪の車輪速度のうち最も低い車輪速度Vmin′に設定される。
【0118】
従って旋回補助制御による制御力の付与が実行されており、旋回内側後輪の車輪速度センサが異常である場合に、基準車輪速度Vwbが輪速度Vmedhiに設定されることを防止し、トラクション制御が不適切に行われることを防止することができる。
【0119】
以上に於いては本発明を特定の実施形態について詳細に説明したが、本発明は上述の実施形態に限定されるものではなく、本発明の範囲内にて他の種々の実施形態が可能であることは当業者にとって明らかであろう。
【0120】
例えば上述の第一の実施形態に於いては、旋回補助制御は旋回内側後輪がロック状態になるまで旋回内側後輪に制動力を付与するようになっているが、旋回内側後輪の制動スリップ量又は制動スリップ率が基準値になるまで制動力が付与されるよう修正されてもよい。
【0121】
また上述の各実施形態に於いては、操舵角θの絶対値に基づいて旋回内側後輪の目標増圧勾配ΔPbrintが演算されることにより、目標増圧勾配が操舵角θの絶対値に応じて可変設定されるようになっているが、目標増圧勾配は一定であってもよい。
【0122】
また上述の各実施形態に於いては、所定の車輪の車輪速度がトラクション制御の基準車輪速度に設定されるようになっているが、所定の車輪の車輪速度に基づいて車両の重心に於ける車体速度が演算され、車体速度が基準車輪速度に設定されてもよい。また車両の重心に於ける車体速度に基づいて制御対象車輪の位置に於ける車体速度が演算され、それらの車体速度がそれぞれ対応する制御対象車輪の基準車輪速度に設定されてもよい。
【0123】
また上述の各実施形態に於いては、トラクション制御に於ける車輪の前後力の低減も車輪に制動力を付与することによって行われるようになっているが、駆動力を低減したり、駆動力を低減すると共に制動力を付与することによって行われてもよい。
【0124】
また上述の各実施形態に於いては、旋回補助制御は旋回内側後輪に制動力を付与するようになっているが、旋回内側前輪に制動力を付与するようになっていてもよい。また一つの旋回内輪に制動力を付与すると共に旋回外輪に駆動力を付与するようになっていてもよい。
【0125】
また上述の各実施形態に於いては、車両運動制御としてオーバーステア抑制制御及びアンダーステア抑制制御が行われるようになっているが、これらの制御が行われなくてもよい。
【符号の説明】
【0126】
10…エンジン、18…トランスファー、24…エンジン制御装置、26…選択スイッチ、28…4WD制御装置、30…前輪ディファレンシャル、36…後輪ディファレンシャル、42…制動装置、50…走行制御用電子制御装置、52FL〜52RR…車輪速度センサ、54…車速センサ、56…操舵角センサ、58…旋回補助スイッチ、60FL〜60RR…圧力センサ
【特許請求の範囲】
【請求項1】
一つの旋回内輪の前後力を低減することにより旋回外輪に比して旋回内輪の前後力が小さくなるよう車輪の前後力を制御する旋回補助制御と、車輪の駆動スリップが過大であるときには当該車輪の前後力を低減することにより駆動スリップを低減するトラクション制御とを行う四輪駆動車の走行制御装置に於いて、各車輪の車輪速度を検出する車輪速度検出手段を有し、前記旋回内輪以外の一つの車輪の車輪速度検出手段に実際の車輪速度よりも低い値として車輪速度を検出する異常が生じており且つ前記旋回補助制御が実行されているときには、前記旋回内輪を除く三つの車輪の車輪速度のうち二番目に低い車輪速度に基づいて車輪の駆動スリップを判定するための基準車輪速度を設定することを特徴とする車両の走行制御装置。
【請求項2】
全ての車輪速度検出手段が正常であり且つ前記旋回補助制御が実行されているときには、前記旋回内輪を除く三つの車輪の車輪速度のうち最も低い車輪速度に基づいて車輪の駆動スリップを判定するための基準車輪速度を設定することを特徴とする請求項1に記載の車両の走行制御装置。
【請求項3】
前記旋回内輪以外の一つの車輪の車輪速度検出手段に実際の車輪速度よりも高い値として車輪速度を検出する異常が生じている状況にて前記旋回補助制御が実行されているときには、前記旋回内輪及び車輪速度検出手段が異常な車輪を除く二つの車輪の車輪速度のうち低い方の車輪速度に基づいて車輪の駆動スリップを判定するための基準車輪速度を設定し、車輪速度検出手段が異常な車輪について車輪の駆動スリップを判定しないことを特徴とする請求項1に記載の車両の走行制御装置。
【請求項4】
各車輪の制動力を検出する制動力検出手段を有し、前記旋回補助制御に於いては前記旋回内輪の制動力に基づいて前記旋回内輪の前後力を低減し、全ての車輪速度検出手段が正常であり且つ前記旋回補助制御が実行されているとき、又は前記旋回内輪の車輪の車輪速度検出手段に実際の車輪速度よりも低い値として車輪速度を検出する異常が生じており且つ前記旋回補助制御が実行されているときには、前記旋回内輪を除く三つの車輪の車輪速度のうち最も低い車輪速度に基づいて車輪の駆動スリップを判定するための基準車輪速度を設定することを特徴とする請求項1乃至3の何れか一つに記載の車両の走行制御装置。
【請求項1】
一つの旋回内輪の前後力を低減することにより旋回外輪に比して旋回内輪の前後力が小さくなるよう車輪の前後力を制御する旋回補助制御と、車輪の駆動スリップが過大であるときには当該車輪の前後力を低減することにより駆動スリップを低減するトラクション制御とを行う四輪駆動車の走行制御装置に於いて、各車輪の車輪速度を検出する車輪速度検出手段を有し、前記旋回内輪以外の一つの車輪の車輪速度検出手段に実際の車輪速度よりも低い値として車輪速度を検出する異常が生じており且つ前記旋回補助制御が実行されているときには、前記旋回内輪を除く三つの車輪の車輪速度のうち二番目に低い車輪速度に基づいて車輪の駆動スリップを判定するための基準車輪速度を設定することを特徴とする車両の走行制御装置。
【請求項2】
全ての車輪速度検出手段が正常であり且つ前記旋回補助制御が実行されているときには、前記旋回内輪を除く三つの車輪の車輪速度のうち最も低い車輪速度に基づいて車輪の駆動スリップを判定するための基準車輪速度を設定することを特徴とする請求項1に記載の車両の走行制御装置。
【請求項3】
前記旋回内輪以外の一つの車輪の車輪速度検出手段に実際の車輪速度よりも高い値として車輪速度を検出する異常が生じている状況にて前記旋回補助制御が実行されているときには、前記旋回内輪及び車輪速度検出手段が異常な車輪を除く二つの車輪の車輪速度のうち低い方の車輪速度に基づいて車輪の駆動スリップを判定するための基準車輪速度を設定し、車輪速度検出手段が異常な車輪について車輪の駆動スリップを判定しないことを特徴とする請求項1に記載の車両の走行制御装置。
【請求項4】
各車輪の制動力を検出する制動力検出手段を有し、前記旋回補助制御に於いては前記旋回内輪の制動力に基づいて前記旋回内輪の前後力を低減し、全ての車輪速度検出手段が正常であり且つ前記旋回補助制御が実行されているとき、又は前記旋回内輪の車輪の車輪速度検出手段に実際の車輪速度よりも低い値として車輪速度を検出する異常が生じており且つ前記旋回補助制御が実行されているときには、前記旋回内輪を除く三つの車輪の車輪速度のうち最も低い車輪速度に基づいて車輪の駆動スリップを判定するための基準車輪速度を設定することを特徴とする請求項1乃至3の何れか一つに記載の車両の走行制御装置。
【図1】



【図2】
【図3】
【図4】
【図5】
【図6】

【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2012−91656(P2012−91656A)
【公開日】平成24年5月17日(2012.5.17)
【国際特許分類】
【出願番号】特願2010−239954(P2010−239954)
【出願日】平成22年10月26日(2010.10.26)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【出願人】(301065892)株式会社アドヴィックス (1,291)
【Fターム(参考)】
【公開日】平成24年5月17日(2012.5.17)
【国際特許分類】
【出願日】平成22年10月26日(2010.10.26)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【出願人】(301065892)株式会社アドヴィックス (1,291)
【Fターム(参考)】
[ Back to top ]