
Fターム[3D246JB23]の内容
ブレーキシステム(制動力調整) (55,256) | 制御方法 (3,867) | 挙動制御の制御輪選択 (157) | 左右輪で制御 (92)
Fターム[3D246JB23]に分類される特許
1 - 20 / 92
車両用姿勢制御装置
【課題】ペダルの踏み込み量、ハンドル操舵量などを考慮して車両の姿勢制御を行うことにより、ドライバの意図するとおりの旋回走行をアシストすることができる車両用姿勢制御装置を提供する。
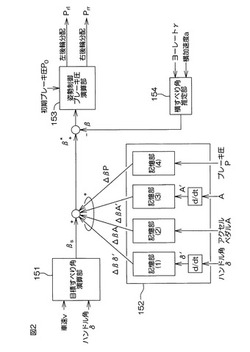
【解決手段】操舵角δと車速vとに基づいて、車両旋回時の目標横すべり角βsを算出する目標横すべり角演算部151と、操舵角速度δ′、アクセルペダルの踏み込み量A、アクセルペダルの踏み込み速度A′、フットブレーキペダルの踏み込み量Bの中から選択される少なくとも1つに対応して算出される横すべり角補正量Δβを用いて、前記目標横すべり角演算部151によって算出された目標横すべり角βsを補正する目標横すべり角補正部152と、前記目標横すべり角補正部152によって補正された目標横すべり角β*を用いて車両の姿勢制御を行う。
(もっと読む)
車両盗難防止制御装置

【課題】車外からの指令に基づいて安全に車両を停止させられる車両盗難防止制御装置を提供する。
【解決手段】車外からの外部停車要求が出されると、それに基づいて車両を停止させる。そして、車両を停止させる際に、所定の減速度、具体的には一定の基準減速度で停止させるようにする。このように、一定の基準減速度で車両を停止することで、急停車させたりすることなく安全に車両を停止させることが可能となる。
(もっと読む)
車両挙動制御装置
【課題】特別な対策や構造の変更を必要とすることなく、ブレーキを用いて車両挙動制御する際の油圧系や駆動系の振動騒音の発生を低減させる。
【解決手段】車速、ハンドル角に基づいて目標横加速度を算出し、目標横加速度と実横加速度とに基づいて車両に付加すべき第1、第2の付加ヨーモーメント、を算出し、第1、第2の制動力を算出する。更に、車両の左右輪間車輪速差を算出して第3の制動力を算出する。そして、これら第1、第2、第3の制動力に基づいて各輪に付加する制動力を、少なくとも左側の前後輪に付加する制動力と右側の前後輪に付加する制動力の大きな方の制動力の側の前輪と後輪のブレーキ液圧が同じ値となるように設定する。第3の制動力を出力する際には、トランスファクラッチを略直結状態とする。
(もっと読む)
車両のヨーモーメント発生旋回効率化装置
【課題】急な旋回の必要時に車両の旋回ヨーモーメントを効率的に発生させることができて、緊急操舵時の確実な転舵が行えるヨーモーメント発生旋回効率化装置を提供する。
【解決手段】左右の車輪1L,1Rを独立して制動力制御または駆動力制御可能なブレーキ4L,4Rおよび駆動系6のいずれか一方と、前記左右の車輪1L,1Rを独立して転舵可能な転舵装置3とを備えた車両20に適用される。操舵手段18の指令に従って転舵装置3を駆動するときに、左右の車輪1L,1Rの転舵動作に時間差を生じさせると共に、左右の車輪1L,1Rの制動・駆動力差を生じさせて旋回ヨーモーメントを発生させる旋回アシスト制御を行う制御手段9を設ける。
(もっと読む)
車両挙動制御装置
【課題】応答性良く予備ブレーキ圧を印加すること。
【解決手段】前後の旋回外輪WFL,WRL(WFR,WRR)の内の少なくとも一方に制動制御量を発生させることで車両10の挙動を安定させる車両挙動安定化制御を行う場合、その制動制御量を前後夫々の旋回外輪WFL,WRL(WFR,WRR)に発生させる条件が成立した場合に、前後の旋回内輪WFR,WRR(WFL,WRL)の内の少なくとも一方に対して予備ブレーキ圧を印加すること。その予備ブレーキ圧の印加は、車両挙動安定化制御の実行中に今の車両10の旋回動作とは逆向きの操舵操作が検知されたときに実行する。
(もっと読む)
車両トレーラに接続される牽引車を制御する方法及びシステム
【課題】トレーラを牽引する牽引車を制御するための、改善された方法及びシステムを提供する。
【解決手段】車両トレーラ102に接続されている牽引車100を制御する方法、及び当該方法を使用するシステム。本方法は、車両目標のセット及び当該車両目標のセットに応答する車両状態のセットを検知することを含む。本方法は、車両目標のセットと車両状態のセットとの間の複数の差を求めること、当該複数の差の傾向を求めること、当該傾向に基づいて対称信号及び非対称信号のうちの少なくとも一方を生成すること、並びに、当該対称信号及び非対称信号のうちの少なくとも一方を用いて車両システムを作動させることも含む。
(もっと読む)
車両用制動力制御装置
【課題】車両がスプリットμ路を走行する際の前一輪のアンチスキッド制御に起因して車両に作用する余分なヨーモーメントを低減しつつ、従来の制動力制御装置の場合に比して後輪の横力が不足する虞れを低減する。
【解決手段】必要に応じて各車輪の制動力を相互に独立に制御可能な制動装置を有する車両用制動力制御装置に係る。一方の前輪に於いてアンチスキッド制御が開始され(ステップ150)、左右の路面の摩擦係数が異なる走行路に関し予め設定された条件が成立していると判定されると(ステップ200)、一方の前輪とは左右反対側の前輪の制動力の増大を抑制すると共に、左右の後輪のうち少なくとも一方の前輪とは左右反対側の後輪の制動力の増大を抑制する(ステップ500又は700)。一方の前輪とは左右反対側の前輪の制動力の増大抑制度合は後輪の制動力の増大の抑制が行われない場合の抑制度合に比して小さい。
(もっと読む)
車両のブレーキ制御装置
【課題】車両旋回時の車体の姿勢変化を早期に検知して姿勢変化を早期に抑制することによって車両の走行安定性を高めることができる車両のブレーキ制御装置を提供すること。
【解決手段】車輪速センサ17によって検出される各車輪5L,5R,6L,6Rの速度と操舵角センサ21によって検出された操舵角に基づいて算出される目標ヨーレートとヨーレートセンサ20によって検出される実ヨーレートとの偏差が閾値を超えるとオーバーステアと判断して旋回外側の駆動輪(前輪5L,5R))にアクティブブレーキを掛けることによって旋回時の車体の姿勢変化を抑制するスタビリティ制御を行う車両のブレーキ制御装置(ECU16)において、旋回内側の非駆動輪(後輪6L,6R)の浮き上がりが検出されると、前記スタビリティ制御を開始する目標ヨーレートと実ヨーレートとの偏差の閾値を小さい値に変更する。
(もっと読む)
アクセルペダル誤操作対応装置およびアクセルペダル誤操作対応装置用のプログラム
【課題】アクセルペダル誤操作を検出して車輪にブレーキトルクを発生させる技術において、ドライバがステアリングを適切に操作できない場合でも、車両が危険領域に進入してしまう可能性を従来よりも低減する。
【解決手段】アクセルペダルの誤操作を検出したとき、現在のタイヤ舵角で左側制動輪および右側制動輪にブレーキトルクを発生させたときに車両が安全領域から逸脱すると判定した場合には、車両の右側制動輪のみまたは左側制動輪のみにブレーキトルクを発生させる。これにより車両は、左右の両制動輪にブレーキトルクを発生したときの軌跡よりも、右側または左側にカーブする。
(もっと読む)
車両用ブレーキ液圧制御装置
【課題】車両が横転しそうなときの姿勢の安定性をより向上させる。
【解決手段】同一軸上に設けられた左右の車輪を個別に制動可能に構成され、旋回中に横転傾向が検知されると車輪を制動して横転抑制制御を実行する車両用ブレーキ液圧制御装置であって、横転抑制制御部120は、横転傾向が検知された場合に、旋回外輪に第1の制動力で制動を行うと同時に、同一軸上の旋回内輪に第1の制動力よりも小さい第2の制動力で制動を開始する。
(もっと読む)
アンチスキッド制御装置
【課題】積載重量の変化に対応したより最適なABS制御を行えるようにする。
【解決手段】前高μ輪に対して実行される制御中ヨーコン制御において、推定積載重量に応じて圧力閾値Pholdを可変とし、推定積載重量に応じて設定される圧力閾値Pholdに基づいて保持制御と緩増圧制御の選択が行われるようにする。このようにすれば、より細かく推定積載重量に応じた最適なABS制御を行うことが可能となる。
(もっと読む)
車両挙動制御装置
【課題】車両挙動の安定化制御の制御性能を向上させること。
【解決手段】実旋回状態と目標旋回状態との偏差に応じた目標旋回制御量を所定の制御対象輪の車輪制動力によって発生させることで車両挙動の安定化制御を行う際、2つのブレーキ液圧の液圧系統の中で制御対象輪の属するものを液圧制御対象に設定して当該液圧系統のマスタカット弁41を閉弁させると共に、他方の液圧系統を非液圧制御対象に設定して当該液圧系統のマスタカット弁42を開弁させ、液圧制御対象の液圧系統のブレーキ液圧を調圧することで制御対象輪に前記車輪制動力を発生させる車両挙動制御装置であって、車体の実旋回挙動量が所定量を超える場合又は目標旋回制御量の絶対値が所定量を超える場合、両方の液圧系統を液圧制御対象に設定し、夫々の液圧系統に属する夫々の制御対象輪の車輪制動力で安定化制御を行うこと。
(もっと読む)
車両の統合制御装置
【課題】多機能化するブレーキシステムのそれぞれの機能を適切に調停し、ドライバの信頼性を高め、安全性を向上する。
【解決手段】ブレーキ制御ユニット30は、横すべり防止制御の機能とコーナリング制動制御の機能と車線逸脱防止ヨーモーメント制御の機能と車線逸脱減速制御の機能と追従走行制御の機能の5つの機能を有しており、車両のヨーモーメントを制御する横すべり防止制御の機能とコーナリング制動制御の機能と車線逸脱防止ヨーモーメント制御の機能は、横すべり防止制御の機能を最優先で実行し、次に、コーナリング制動制御の機能を優先して実行し、次いで、車線逸脱防止ヨーモーメント制御の機能を実行する。また、車両を減速制御する車線逸脱減速制御の機能と追従走行制御の機能は、減速指示値の大きい方の減速指示値を出力する。
(もっと読む)
車両の挙動制御装置
【課題】各種状態制御量の制御を介して最終的に車両状態量を制御する各種のデバイスが故障した場合において、故障したデバイスに対応する状態制御量を中立点に復帰させるまでの過渡的過程における車両挙動を安定に維持する。
【解決手段】車両の挙動制御装置(100)は、ドライバによる操舵とは無関係に前輪の舵角を変化させることが可能な前輪舵角可変手段及びドライバによる操舵とは無関係に後輪の舵角を変化させることが可能な後輪舵角可変手段のうち一方が異常状態にあるか否かを判定する判定手段と、一方が異常状態にあると判定された場合に、この一方に対応する異常側車輪の舵角を中立点に戻す舵角戻し手段と、異常側車輪の舵角を中立点に戻す過程において、異常側車輪の舵角の戻し量に応じて、異常状態にない他方に対応する正常側車輪の舵角と左右制駆動力差とを制御する制御手段とを具備する。
(もっと読む)
車両用制動力制御装置
【課題】制動装置の失陥の有無を正確に判定すると共に、失陥があるときには余分なヨーモーメントの増大や車両の減速度の低下が抑制されるよう後輪の制動力を制御する。
【解決手段】ダイヤゴナル二系統の制動装置を有し、制動時に前輪に対する左右後輪の車輪速度の関係が目標の関係になるよう左右後輪の制動圧を個別に制御することにより制動力の前後輪配分制御を行う制動力制御装置。一方の系統の一方の車輪と他方の系統の一方の車輪との間の車輪速度の差の大きさ、又は一方の系統の他方の車輪と他方の系統の他方の車輪との間の車輪速度の差の大きさが閾値を越えるか否かを判定する(S170、270)。越えるときには、左右後輪のうち車輪速度が高い方の車輪を含む系統が失陥していると判定し、他方の後輪について制動力の前後輪配分制御による制動圧の低減を行わない(S190、290)。
(もっと読む)
車両用制動力制御装置
【課題】制動力の前後輪配分を制御する際の車両の余分なヨーレートに起因するふらつきを防止する。
【解決手段】制動時に後輪の車輪速度が前輪の車輪速度よりも車輪速度の目標相違量高い後輪の目標車輪速度になるよう左右後輪の制動力を個別に制御することにより制動力の前後輪配分制御を行う車両用制動力制御装置。前輪に対する後輪の目標車輪速度Vwrtを演算し(S100)、接地荷重増大側の後輪の目標車輪速度が接地荷重減少側の後輪の目標車輪速度に比して低くなるよう、車両のロールレートφdに基づいて後輪の目標車輪速度を補正することにより、左右後輪の目標車輪速度Vwrlt及びVwrrtを演算する(S150〜600)。そして左右後輪の車輪速度が目標車輪速度になるよう制動力を制御する(S950)。
(もっと読む)
車両の走行制御装置
【課題】旋回補助制御及びトラクション制御が同時に実行される場合に、車輪速度を検出する装置の異常に起因して基準車輪速度が不適切な値になりトラクション制御が不適切に実行されることを防止する。
【解決手段】旋回外輪に比して旋回内輪の前後力が小さくなるよう車輪の前後力を制御する旋回補助制御と、車輪の駆動スリップが過大であるときには当該車輪の前後力を低減することにより駆動スリップを低減するトラクション制御とを行う車両の走行制御装置。旋回内輪以外の一つの車輪の車輪速度検出手段に実際の車輪速度よりも低い値として車輪速度を検出する異常が生じており且つ旋回補助制御が実行されているときには、旋回内輪を除く三つの車輪の車輪速度のうち二番目に低い車輪速度Vmedloに基づいて車輪の駆動スリップを判定するための基準車輪速度Vwbを設定する。
(もっと読む)
車両の制駆動力制御装置
【課題】 従動輪の制動力および駆動輪の制駆動力を制御し、車両を適切に走行させるとともに車両の挙動を制御する車両の制駆動力制御装置を提供すること。
【解決手段】 電子制御ユニット30は、センサ31,32,33から入力した各検出値に基づいて車両Veの挙動を制御するために各輪11〜14が発生すべき前後力Ffl,Ffr,Frl,Frrを演算する。ユニット30は、従動輪11,12側の前後力Ffl、Ffrの大きさを比較し、大きい方の前後力が駆動力であるか否かを判定する。そして、ユニット30は、大きい方の前後力が駆動力であるときにこの前後力を用いてオフセット前後力FOSを演算し、従動輪11,12の前後力Ffl、Ffrから前後力FOSを減算するとともに駆動輪13,14の前後力Frl,Frrに前後力FOSを加算して、左右前輪11,12および左右後輪13,14の目標前後力Fdfl,Fdfr,Fdrl,Fdrrを演算する。
(もっと読む)
アーティキュレート車両における小旋回制御装置
【課題】既存のポンプを利用した安価な回路を用いて、フルアーティキュレート状態でなくても小旋回ブレーキモードを発揮させることで多くのハンドル旋回操作を不要としたアーティキュレート車両における小旋回制御装置を提供する。
【解決手段】小旋回スイッチがオンの状態で後車体に対し前車体を屈折させるハンドル旋回操作があると、コントローラは、電磁弁56A,56Bを閉じて左ブレーキ回路41と右ブレーキ回路42間を遮断するとともに、方向切換弁59を切換えて、ポンプ57を他の回路60aから小旋回圧供給回路60に切換える。旋回内側に対応する左小旋回用比例減圧弁63または右小旋回用比例減圧弁64の一方を弁開状態に制御するとともに、電磁弁66を弁開状態に制御して、アキュームレータ62内に蓄えられた作動油を、左ブレーキ回路41または右ブレーキ回路42の一方に供給する。
(もっと読む)
アーティキュレート車両における小旋回制御装置
【課題】既存のポンプを用いた安価な回路を用いて、フルアーティキュレート状態でなくても小旋回ブレーキモードを起動させることで多くのハンドル旋回操作を不要としたアーティキュレート車両における小旋回制御装置を提供する。
【解決手段】小旋回スイッチがオンの状態で後車体に対し前車体を屈折させるハンドル旋回操作があると、コントローラは、電磁弁56A,56Bを閉じて左ブレーキ回路41と右ブレーキ回路42間を遮断するとともに、電磁比例リリーフ弁62のリリーフ圧を無負荷状態から設定圧までの範囲内でアーティキュレート角に応じた圧に制御することで、プライオリティバルブ59をシフトさせて、ポンプ57からバケット作業機回路60aへの流量より小旋回圧供給回路60への流量を優先させるとともに、電磁比例リリーフ弁62に基づいて小旋回圧供給回路60の圧力を制御し、左旋回の場合は左小旋回制御弁63のみを弁開状態に制御する。
(もっと読む)
1 - 20 / 92
[ Back to top ]