
Fターム[3D246JB22]の内容
ブレーキシステム(制動力調整) (55,256) | 制御方法 (3,867) | 挙動制御の制御輪選択 (157) | 前輪と後輪とで制御 (37)
Fターム[3D246JB22]に分類される特許
1 - 20 / 37
制動力制御装置
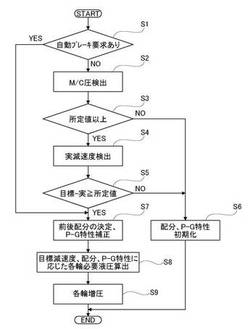
【課題】目標減速度と実減速度に差が出る制動時、目標減速度に到達する応答性を向上すること。
【解決手段】ハイブリッド車の制動力制御装置は、ブレーキ操作に応じて車輪に付与するマスターシリンダ液圧を発生するブレーキ液圧発生装置1と、統合コントローラ9と、を備える。統合コントローラ9は、マスターシリンダ液圧が所定値より高く、目標減速度と実減速度の差が所定値以上の場合、マスターシリンダ液圧による制動力で不足する減速度の差分をアシスト液圧によるアシスト制動力で補うと共に、フロント側配分とリア側配分による制動力前後配分について、目標減速度と実減速度の差が所定値未満のときの定常時配分と比較してフロント側配分を上げる制御を行う(図3)。
(もっと読む)
車両挙動制御装置

【課題】特別な対策や構造の変更を必要とすることなく、ブレーキを用いて車両挙動制御する際の油圧系や駆動系の振動騒音の発生を低減させる。
【解決手段】車速、ハンドル角に基づいて目標横加速度を算出し、目標横加速度と実横加速度とに基づいて車両に付加すべき第1、第2の付加ヨーモーメント、を算出し、第1、第2の制動力を算出する。更に、車両の左右輪間車輪速差を算出して第3の制動力を算出する。そして、これら第1、第2、第3の制動力に基づいて各輪に付加する制動力を、少なくとも左側の前後輪に付加する制動力と右側の前後輪に付加する制動力の大きな方の制動力の側の前輪と後輪のブレーキ液圧が同じ値となるように設定する。第3の制動力を出力する際には、トランスファクラッチを略直結状態とする。
(もっと読む)
車両用制動力制御装置
【課題】車両がスプリットμ路を走行する際の前一輪のアンチスキッド制御に起因して車両に作用する余分なヨーモーメントを低減しつつ、従来の制動力制御装置の場合に比して後輪の横力が不足する虞れを低減する。
【解決手段】必要に応じて各車輪の制動力を相互に独立に制御可能な制動装置を有する車両用制動力制御装置に係る。一方の前輪に於いてアンチスキッド制御が開始され(ステップ150)、左右の路面の摩擦係数が異なる走行路に関し予め設定された条件が成立していると判定されると(ステップ200)、一方の前輪とは左右反対側の前輪の制動力の増大を抑制すると共に、左右の後輪のうち少なくとも一方の前輪とは左右反対側の後輪の制動力の増大を抑制する(ステップ500又は700)。一方の前輪とは左右反対側の前輪の制動力の増大抑制度合は後輪の制動力の増大の抑制が行われない場合の抑制度合に比して小さい。
(もっと読む)
車両挙動制御装置
【課題】ブレーキによるヨーモーメント制御のハンチングの発生を抑制し、滑らかな車両挙動で、制御精度を向上する。
【解決手段】車両の運転状態に基づいて車両の目標ヨーレートγtを算出し、車体すべり角速度に基づいて車体すべり角速度感応ゲインGdβを設定し、ヨーレート、γt、Gdβに基づいて目標ヨーモーメントMztを算出し、旋回内側前後輪に付加する目標ブレーキ液圧算出する。ここで、車体すべり角速度感応ゲインGdβは、目標ヨーモーメントMztの値が、タイヤのグリップ限界を超えるヨーレートを発生させる値とならないように、車体すべり角速度の絶対値に応じて目標ヨーモーメントMztを減少補正する補正ゲインとなっているが、この減少補正の際、目標ヨーモーメントMztを0としてしまわないように、0よりも大きな値を下限値として減少補正する。
(もっと読む)
電気自動車
【課題】 左右の車輪を個別に駆動する複数のモータを備えた電気自動車において、1輪分のモータ異常が発生した場合に、停止させることなく、車両姿勢の安定化を図って走行を可能とする。
【解決手段】 各モータ6の異常を検出するモータ異常検出手段37と、片側異常時対応制御手段38とを設ける。片側異常時対応制御手段38は、モータ異常検出手段37により、車両の同じ前後方向位置にある左右のいずれか一方の車輪2,3のモータ6にモータ停止以外の異常が検出された場合に、同じ前後方向位置にある他方の車輪2,3のモータ6を、異常の検出されたモータ6の動作状態と同じ動作状態に近づくように制御する。この制御は、他方のモータ6のトルクを強制的に減じる制御、回生ブレーキとして作用させる制御、他方の車輪2,3のブレーキ作動の制御等とする。
(もっと読む)
車両用ブレーキ液圧制御装置
【課題】車両が横転しそうなときの姿勢の安定性をより向上させる。
【解決手段】同一軸上に設けられた左右の車輪を個別に制動可能に構成され、旋回中に横転傾向が検知されると車輪を制動して横転抑制制御を実行する車両用ブレーキ液圧制御装置であって、横転抑制制御部120は、横転傾向が検知された場合に、旋回外輪に第1の制動力で制動を行うと同時に、同一軸上の旋回内輪に第1の制動力よりも小さい第2の制動力で制動を開始する。
(もっと読む)
車両の制御装置
【課題】 コースト走行時に安定した車両挙動が得られる車両の制御装置を提供すること。
【解決手段】 駆動輪に駆動力と回生制動力とを付与するモータと、各輪に摩擦制動力を発生するブレーキ手段と、従動輪及び駆動輪の車輪速を検出する車輪速検出手段と、運転者に加速意図が無いときは運転者の制動要求に関わらずコースト回生制動力を付与するコースト回生制御手段と、運転者のブレーキ操作時に回生制動力の変化に応じて摩擦制動力を調整する協調回生制動の制御中に、前記車輪速検出手段により検出された従動輪車輪速よりも駆動輪車輪速が第1所定値以上低下したときは、駆動輪の回生制動力を低下しつつ従動輪の摩擦制動力を増加させる協調回生制御手段と、前記車輪速検出手段により検出された従動輪車輪速よりも駆動輪車輪速が前記第1所定値よりも大きな第2所定値以上低下したときは、前記コースト回生制動力を小さくするコースト回生制動力変更手段と、を備えた。
(もっと読む)
車両の統合制御装置
【課題】多機能化するブレーキシステムのそれぞれの機能を適切に調停し、ドライバの信頼性を高め、安全性を向上する。
【解決手段】ブレーキ制御ユニット30は、横すべり防止制御の機能とコーナリング制動制御の機能と車線逸脱防止ヨーモーメント制御の機能と車線逸脱減速制御の機能と追従走行制御の機能の5つの機能を有しており、車両のヨーモーメントを制御する横すべり防止制御の機能とコーナリング制動制御の機能と車線逸脱防止ヨーモーメント制御の機能は、横すべり防止制御の機能を最優先で実行し、次に、コーナリング制動制御の機能を優先して実行し、次いで、車線逸脱防止ヨーモーメント制御の機能を実行する。また、車両を減速制御する車線逸脱減速制御の機能と追従走行制御の機能は、減速指示値の大きい方の減速指示値を出力する。
(もっと読む)
車両用制動力制御装置
【課題】制動装置の失陥の有無を正確に判定すると共に、失陥があるときには余分なヨーモーメントの増大や車両の減速度の低下が抑制されるよう後輪の制動力を制御する。
【解決手段】ダイヤゴナル二系統の制動装置を有し、制動時に前輪に対する左右後輪の車輪速度の関係が目標の関係になるよう左右後輪の制動圧を個別に制御することにより制動力の前後輪配分制御を行う制動力制御装置。一方の系統の一方の車輪と他方の系統の一方の車輪との間の車輪速度の差の大きさ、又は一方の系統の他方の車輪と他方の系統の他方の車輪との間の車輪速度の差の大きさが閾値を越えるか否かを判定する(S170、270)。越えるときには、左右後輪のうち車輪速度が高い方の車輪を含む系統が失陥していると判定し、他方の後輪について制動力の前後輪配分制御による制動圧の低減を行わない(S190、290)。
(もっと読む)
車両用制動力制御装置
【課題】制動力の前後輪配分を制御する際の車両の余分なヨーレートに起因するふらつきを防止する。
【解決手段】制動時に後輪の車輪速度が前輪の車輪速度よりも車輪速度の目標相違量高い後輪の目標車輪速度になるよう左右後輪の制動力を個別に制御することにより制動力の前後輪配分制御を行う車両用制動力制御装置。前輪に対する後輪の目標車輪速度Vwrtを演算し(S100)、接地荷重増大側の後輪の目標車輪速度が接地荷重減少側の後輪の目標車輪速度に比して低くなるよう、車両のロールレートφdに基づいて後輪の目標車輪速度を補正することにより、左右後輪の目標車輪速度Vwrlt及びVwrrtを演算する(S150〜600)。そして左右後輪の車輪速度が目標車輪速度になるよう制動力を制御する(S950)。
(もっと読む)
車両の制駆動力制御装置
【課題】 従動輪の制動力および駆動輪の制駆動力を制御し、車両を適切に走行させるとともに車両の挙動を制御する車両の制駆動力制御装置を提供すること。
【解決手段】 電子制御ユニット30は、センサ31,32,33から入力した各検出値に基づいて車両Veの挙動を制御するために各輪11〜14が発生すべき前後力Ffl,Ffr,Frl,Frrを演算する。ユニット30は、従動輪11,12側の前後力Ffl、Ffrの大きさを比較し、大きい方の前後力が駆動力であるか否かを判定する。そして、ユニット30は、大きい方の前後力が駆動力であるときにこの前後力を用いてオフセット前後力FOSを演算し、従動輪11,12の前後力Ffl、Ffrから前後力FOSを減算するとともに駆動輪13,14の前後力Frl,Frrに前後力FOSを加算して、左右前輪11,12および左右後輪13,14の目標前後力Fdfl,Fdfr,Fdrl,Fdrrを演算する。
(もっと読む)
車両の走行制御装置
【課題】旋回補助制御及びトラクション制御が同時に実行される場合に、車輪速度を検出する装置の異常に起因して基準車輪速度が不適切な値になりトラクション制御が不適切に実行されることを防止する。
【解決手段】旋回外輪に比して旋回内輪の前後力が小さくなるよう車輪の前後力を制御する旋回補助制御と、車輪の駆動スリップが過大であるときには当該車輪の前後力を低減することにより駆動スリップを低減するトラクション制御とを行う車両の走行制御装置。旋回内輪以外の一つの車輪の車輪速度検出手段に実際の車輪速度よりも低い値として車輪速度を検出する異常が生じており且つ旋回補助制御が実行されているときには、旋回内輪を除く三つの車輪の車輪速度のうち二番目に低い車輪速度Vmedloに基づいて車輪の駆動スリップを判定するための基準車輪速度Vwbを設定する。
(もっと読む)
電動車両の制御装置
【課題】回生協調制御による電費向上効果を最大限に生かしつつ、限界領域に近い走行シーンにおいて車両挙動の安定性を確保すること。
【解決手段】電動車両の制御装置は、回生協調ブレーキ制御手段としてモータコントローラ21およびブレーキコントローラ10と、舵角補正ステアリング制御手段として4WASコントローラ22と、車両挙動制御手段として車両コントローラ9と、を備える。車両コントローラ9は、回生協調ブレーキ制御時、車両挙動の乱れを補償するように、舵角補正ステアリング制御により舵角補正をした後、依然として車両挙動が不安定であると判断されたとき(図4のステップS6でNO)、回生協調ブレーキ制御による回生トルクを低下させる制御を行う(図4のステップS7,S8)。
(もっと読む)
車両の制動制御装置
【課題】 車両の旋回挙動を安定して制御可能な車両の制動制御装置を提供する。
【解決手段】 コントロールユニット3は、車両のアンダーステア傾向を抑制するヨーモーメントを車両に付加すべく車両の旋回内輪の前後輪を制御対象輪として制動力を付与する制動力制御手段(前後目標ヨーモーメント算出部23、各輪目標制動力算出部24および液圧制御装置4)と、操舵速度dθを検出する操舵速度検出手段と、操舵速度dθが高いほどフロントヨーモーメント配分を大きくするヨーモーメント配分算出部22と、を備える。
(もっと読む)
車両の制動力制御装置
【課題】車輪ロックやABSによる減圧に伴う付加ヨーモーメントの減少を極力抑え、付加制動力を最小化して走行ロスを低減する。
【解決手段】旋回内輪に付加する総制動力FB、旋回内輪の総駆動力FDを算出し、旋回内輪に付加する総制動力FBに対する旋回内側前輪に付加する制動力の割合を制動力の前後配分比DBとして、タイヤのグリップ状態が限界に近づくに従って、制動力の前後配分比DBを静止時の接地荷重配分比に近い値から減少させて設定して、これら旋回内輪に付加する総制動力FBと旋回内輪の総駆動力FDと制動力の前後配分比DBとに応じて旋回内輪の前輪と後輪のそれぞれに付加する制動力FBf、FBrを算出する。
(もっと読む)
制動制御装置
【課題】衝突形態に応じて最適な時間に亘って自動的に制動機構を作動させる。
【解決手段】自車両の衝突を検出する衝突検知センサ2a〜2dと、自車両の車速を検出する車速センサ4とを備え、制駆動力コントロールユニット12は、衝突検知センサ2a〜2dにより自車両の衝突が検出された場合に、当該衝突を検出した後に車速センサ4により検出された車速に基づいて、自動的に制動力を発生させる時間である自動制動時間を制御して、ブレーキ制御装置6を作動させる。
(もっと読む)
車両走行制御装置及びその方法
【課題】アンダステア抑制制御中の車両のタックインの発生に起因する制動力制御が運転者に違和感を与えてしまうのを防止する。
【解決手段】車両走行制御装置は、アンダステア抑制制御中のアクセルペダルの操作状態を基に、車両のタックインの発生を推定するタックイン推定部16と、タックイン推定部16がタックインが発生すると推定したとき、アンダステア抑制制御による前後輪の制動力を減少させて前後輪の制動力の付与を解除する減少勾配算出部17及びブレーキ液圧算出部18と、を有し、減少勾配算出部17及びブレーキ液圧算出部18は、前後輪の制動力配分を後輪寄りに設定して前後輪の制動力を減少させる。
(もっと読む)
車両の制動制御装置
【課題】
車両の安定性を確保する車両安定化制御において、回生制動と摩擦制動とを効率的に協働し得る車両の制動制御装置を提供する。
【解決手段】
車両の車輪に摩擦制動トルクを付与する摩擦制動手段FRCと、車輪に回生制動トルクを付与する回生制動手段RGNと、制御手段CTLを備える。制御手段CTLは、車両の旋回状態の程度を表す旋回量Tcaに基づいて演算される第1状態量Tcx(例えば、ステア特性量Sch)に基づいて摩擦制動トルクを増加する摩擦制動制御を実行するとともに、旋回量Tcaに基づいて演算される、第1状態量Tcxとは異なる第2状態量Tcy(例えば、操舵速度dSa)に基づいて回生制動トルクを増加する回生制動制御を実行する。制御手段CTLは、回生制動トルクの増加を開始した後に、摩擦制動トルクの増加を開始する。また、回生制動手段RGNは、車輪のうちで少なくとも前輪に備えられる。
(もっと読む)
車両の坂道発進支援ブレーキ装置およびその制御方法
【課題】運転者の操作を介さずに坂道等で停車状態を維持するのに必要なブレーキ力を保持するための方法を提供する。
【解決手段】本発明の一実施形態によれば、車両の停止中に車両の制動力を制御する方法が提供される。本方法は、(a)車両の停止を検出するステップと、(b)運転者によるブレーキ入力解除を検出するステップと、(c)運転者によるブレーキ入力解除時の車両の総ブレーキ力を算出するステップと、(d)車両の停止維持に必要なブレーキ力を計算するステップと、(e)算出された総ブレーキ力で車両の停止を維持できるかどうかを判断するステップと、(f)測定された総ブレーキ力で車両の停止を維持できないと判断されたときに、車両の総ブレーキ力を増加させるステップと、を有する。
(もっと読む)
車両の運動制御装置
【課題】
運転者が障害物等を回避する緊急操舵において、路面の摩擦係数を用いることなく、路面状態に応じた好適な制動力制御を実行できる車両の運動制御装置を提供する。
【解決手段】
車両の車輪に制動トルクを付与する制動手段と、車両の操舵状態が緊急操舵であるか否かを取得する緊急操舵取得手段と、緊急操舵取得手段が前記緊急操舵であることを取得した場合において、車輪の制動トルクを増加する制御手段とを備える車両の運動制御装置であって、車輪速度を取得する車輪速度取得手段と、車輪速度に基づいて過大な前後スリップを抑制するスリップ抑制制御を実行するスリップ抑制手段とを備え、前記制御手段は旋回内側の前輪にスリップ抑制制御が実行される場合に、旋回外側の前輪に対する制動トルクの増加量を制限する制限制御を行う。
(もっと読む)
1 - 20 / 37
[ Back to top ]