
Fターム[2F077TT71]の内容
感知要素の出力の伝達及び変換 (32,270) | 信号処理回路(特性補償雑音除去を除く) (4,069) | カウンタを用いる信号処理 (278)
Fターム[2F077TT71]の下位に属するFターム
アップ・ダウンカウンタ (77)
位相検出に用いるもの (26)
パルス幅検出に用いるもの (13)
パルス間隔検出に用いるもの (8)
時間の検出に用いるもの (20)
周波数の分周又は逓倍に用いるもの (12)
Fターム[2F077TT71]に分類される特許
101 - 120 / 122
回転角検出装置とその異常検出装置及び電動パワーステアリング装置
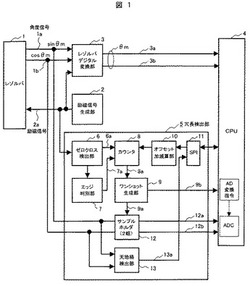
【課題】レゾルバ出力信号から、角度を正確に検出でき、電動パワーステアリング等の回転角検出装置の異常を検出し、そのバックアップを可能とする。
【解決手段】回転軸に備えたレゾルバ1に、励磁信号生成部2から励磁信号を出力し、変換器3でディジタル信号に変換し、CPU4に回転角信号を入力するステアリング回転角検出の主系に対し、その異常を検出する異常検出装置を備えた回転角検出装置において、励磁信号の周期を逐次測定する手段(ゼロクロス検出部6,カウンタ8)と、周期測定結果よりオフセット量を算出し、AD変換のタイミング信号を生成する手段(ワンショット生成部9)とにより、前記レゾルバ出力のピーク値を読み込むとともに、前記変換タイミング信号のオフセット量を調整する手段(オフセット加減算部10,SPI11)を備えた。
(もっと読む)
絶対位置検出装置付き電動サーボシリンダ

【課題】 従来のバッテリタイプ絶対位置検出装置付き電動サーボシリンダでは、主電源OFF時の絶対位置データを保持するために使用するバックアップ用バッテリには有限の時間制約が存在し、また、一定稼動期間後には寿命劣化による交換作業が必要であった。
【解決手段】 本発明は、主電源OFF時に、サーボモータ軸を停止保持するブレーキ機構、あるいは、シリンダの回転−直動機構に台形ネジ機構を用いることにより、その機構が本来的に有する機械機能であるセルフロック機能を活用し、主電源OFF後にバックアップ電源よりの電力供給を微小時間通電(ブレーキが作動するまでの時間)し、その後はバックアップ電源よりの電力を停止し、バッテリの電力消費を著しく減少させることによって、無限の再充電性能を有する電気二重層コンデンサをバッテリのかわりに使用することを可能とし、バッテリの交換作業を取り除くようにした。
(もっと読む)
回転角度検出装置および回転角度検出装置付き軸受
【課題】 検出速度が早く、かつ高い検出精度が得られ、小型化も可能な回転角度検出装置、およびその回転角度検出装置を備えた軸受を提供する。
【解決手段】 磁気発生手段4にその回転中心Oの軸方向に対向して非回転側部材2に配置された磁気センサアレイ5A〜5Dと、これら磁気センサアレイ5A〜5Dの出力から磁気発生手段4の回転角度を算出する角度計算手段17とを備える。磁気センサアレイ5A〜5Dを走査するスキャン回路10は、磁気センサアレイ5A〜5Dの信号読み出し時に、隣合う複数の画素を同時に選択することが可能な画素選択回路19を有し、複数の画素を同時に選択しながら、順次走査するものとする。
(もっと読む)
センサ検出装置及びセンサ
【課題】センサ素子のブリッジ回路の断線又は短絡等の故障と、センサ素子の出力を増幅するための増幅器に生じた故障とを検知することができるセンサ検出装置を提供する。また、このセンサ検出装置を備えるセンサを提供する。
【解決手段】入力段差動増幅器20の2つの入力信号Va、Vbをそれぞれ監視する2つの監視回路40a、40bと、2つの出力信号Vc、Vdをそれぞれ監視する2つの監視回路40c、40dを設ける。センサ素子のブリッジ回路又は入力段差動増幅器20に故障が発生した場合には、監視部40a、40b又は監視部40c、40dにて異常が検知されるため、センサ素子及び入力段差動増幅器20の故障を検知できる。
(もっと読む)
角度検出装置及び回転座標演算装置
【課題】レゾルバを用いた角度検出装置及び回転座標演算装置において、廉価な構成で処理所要時間を短縮することを可能とする。
【解決手段】本発明の角度検出装置は、レゾルバの回転角度を算出する角度算出手段とを備え、角度算出手段は、区間識別手段によって出力される角度区間表示信号と、位相同期手段の最終出力とに基づき位相同期手段の最終出力のパルス数をカウントするカウント手段と、カウント値と関連づけられた角度情報とを格納するメモリ手段と、カウント値によって定まる角度情報を抽出する抽出手段とを有することを特徴とする。
(もっと読む)
アブソリュート位置検出装置
【課題】本発明は、薄膜プロセスで形成した給電用トランス及び位置検出用コイルと磁気ヘッドを用いてアブソリュート位置信号を得ることを目的とする。
【解決手段】本発明によるアブソリュート位置検出装置は、固定部材(30)に設けた給電用トランス(5)、励磁信号供給部(10)、位置検出用コイル(20)及び信号処理回路部(31)を薄膜プロセスで形成し、磁気ヘッド(1)の位置を前記位置検出用コイル(20)で検出する構成である。
(もっと読む)
エンコーダ
【課題】回転軸の回転寿命を予知する。
【解決手段】ロータリエンコーダ30において検出された回転軸32の回転方向及び回転角度から回転軸32の回転数を回転軸32の回転方向にかかわらず計数し、回転軸32の積算回転数を求める積算回転数算出手段(積算回転数算出部11及び積算回転数記憶メモリ12)と、ベアリング33の定格寿命に基づいて定められた基準回転数を記憶した基準回転数記憶部13と、積算回転数算出手段において算出された回転軸32の積算回転数と基準回転数記憶部13に記憶された基準回転数とを比較し、積算回転数算出手段において算出された回転軸32の積算回転数が基準回転数記憶部13に記憶された基準回転数に達したときに警報作動を行う警報手段(警報作動部14及び警報装置15)とを備える。
(もっと読む)
リニアモータ
【課題】固定子への着磁を必要とすることなく、可動子の位置を検出可能なリニアモータを提供することを課題とする。
【解決手段】固定体10と、この固定体10の長手方向を移動可能な可動体20とからなるリニアモータ1であって、前記固定体10の長手方向には、所定の間隔ごとに突形状の導電体部材12が設けられており、前記可動体20には、前記導電体部材12と対向するように発信回路21cを有する電極対21a、21bが設けられており、前記発信回路21cから出力される周波数によって前記固定体10における前記可動体20の位置を検出する。
(もっと読む)
回転角検出装置及びこれを用いた電動パワーステアリング装置
【課題】 信号の強度への依存を低減し、異常の判定時間を短縮した角度検出装置及びこれを用いた電動パワーステアリング装置を提供する。
【解決手段】回転体1の回転に伴って発生する正弦波信号sinθ及び余弦波信号cosθの少なくとも一方の信号を用いて前記回転体の回転角度を検出する回転角検出装置10であって、前記信号の単位時間あたりの変化量に基づいて前記回転角検出装置の異常を判定することを特徴とする。また、この回転角検出装置10を用いて電動パワーステアリング装置のモータ角度を検出する。
(もっと読む)
回転角検出装置
【課題】 高速演算が不要な構成とすると共に、A/D変換手段を簡単な回路構成にて実現する。
【解決手段】 本発明の回転角検出装置は、レゾルバの一次巻線に所定の基準アナログ正弦波信号を印加し、レゾルバの2個の2次巻線から出力される2つの測定アナログ信号に基づいて回転子の回転角を検出するように構成されたものにおいて、一方の2次巻線から出力される第1測定アナログ信号を基準アナログ正弦波信号の1/2の周期毎に積分した値をA/D変換する第1のA/D変換手段を備えると共に、他方の2次巻線から出力される第2測定アナログ信号を基準アナログ正弦波信号の1/2の周期毎に積分した値をA/D変換する第2のA/D変換手段を備えたところに特徴を有する。
(もっと読む)
位置検出センサの摩耗診断方法
【課題】
ロボットの関節の各自由度の動作を行なうモータの出力位置を検出するポテンショメータの摩耗を、自動的に、定量的に、しかも高精度に診断する。
【解決手段】
ポテンショメータ16の出力データを取得し、ある時点Aを含む過去いくつかのサンプル値、B、C、D、E、F・・・の差分(B−C)、(B−D)、(B−E)、(B−F)から、ノイズピーク値を算出し、該ノイズピーク値を判定しきい値と比較して、判定しきい値を超える場合に摩耗しているものと判断する。
(もっと読む)
位置検出器
【目的】 本発明の目的は、可動物体の位置変位をコイルのインダクタンス変化として感知して発振周波数の変化に変換し、さらに発振周期に対応する2進情報を発生し、この2進情報を2進情報補正回路により補正してディジタル出力を得ることにより、位置変位とディジタル出力との直線性を確保すると共にディジタル出力が電源電圧変動の影響を受けないようにした位置検出器を提供することである。
【構成】 コイル2のインダクタンスがコイル2と可動物体との相対位置により変化するようにしたコイル2を含む発振回路と、発振周期に比例して2進情報を発生する2進情報生成回路と、直線性補正を行なう2進情報補正回路より構成した位置検出器。
(もっと読む)
エンジン制御装置
【課題】 クランク信号が異常時のリンプホームを、少ないソフト、ハードの追加で実現する。
【解決手段】 端子20への入力信号に生じる立ち上がりエッジの間隔を計測すると共に、その計測値を所定の逓倍数で割った時間を1周期とするクロックを生成して、そのクロックにより、クランク位置を表すアングルカウンタを動作させる回路19を備え、上記アングルカウンタの値に基づきエンジンの制御を実施する装置では、マイコン13が、クランク信号が異常と判定すると、入力制御回路17から上記回路19へクランク信号に代えてカム信号を入力させ、更に、そのカム信号に基づいて、アングルカウンタの値を初期化すると共に、上記逓倍数をカム信号の波形パターンに応じた規則で変化させることで、アングルカウンタの値を、クランク信号が正常な場合と同様に変移させる。このため、正常時と同じ制御プログラムでエンジンを制御できる。
(もっと読む)
ロータリテーブル制御装置
【課題】電源遮断時に回転位置の変動が発生しても、バックアップ電源なしで回転位置を正しく検出できるロータリテーブル制御装置を実現する。
【解決手段】インクリメンタルエンコーダ13のC相パルスbで、C相パルスb入力時のモータ12の回転位置データをラッチする。C相パルス入力点の理想回転位置データを演算し、この理想回転位置データから回転位置データを差し引くことによって誤差分εfを計算する。以後、誤差分εfで回転位置データを補正する。
(もっと読む)
エンコーダ位置検出回路
【課題】 オフセットの影響を受けず、かつ製造コストが低いエンコーダ位置検出回路を提供する。
【解決手段】 インクリメンタルエンコーダから90度の位相差で出力されるA相信号及びB相信号を時分割して被比較電圧とし、基準電圧VRTと基準電圧VRBとの間に直列に接続された抵抗間の電圧を比較電圧とするチョッパ型コンパレータを備えるAD変換部2と、AD変換部2から出力されるデータを基にA相信号及びB相信号のオフセット誤差をそれぞれ補正した後、A相信号を反転させた反転A相信号とB相信号を反転させた反転B相信号とを生成し、A相信号、反転A相信号、B相信号及び反転B相信号に基づいて、インクリメンタルエンコーダの1周期を逓倍した逓倍信号を1サイクルで生成する演算部3と、AD変換手段及び演算手段へ動作クロックを供給するクロックジェネレータ1とを有する。
(もっと読む)
回転角度検出装置、回転角度検出方法およびX線コンピュータ断層撮影装置
【課題】 比較的低精度の信号生成手段を用いた場合であっても回転角度を高精度に検出でき且つ演算上の誤差を低減する。
【解決手段】 学習段階において、定速回転中に光学式センサ10から検出信号S2が出力された時を基点に、ゼロクロス点検出回路15からゼロクロス検出信号S4が順次出力されるまでの各時間間隔Tnを計測し、その計測した各時間間隔Tnを角度に変換して得られる学習角度θnをメモリ20に記憶する。その後の検出段階において、ゼロクロス検出信号S4が出力されるごとに当該ゼロクロス検出信号S4に対応した学習角度θnに相当するカウント値N(θn)を角度カウンタ24にセットし、ゼロクロス検出信号S4相互間では、角度カウンタ24は、角度変化率演算部26により演算した直前の期間の角度変化率に応じた周波数を持つクロック信号S6をカウントする。
(もっと読む)
角度検出信号処理装置
【課題】簡易な構成でありながら、リアルタイムで精度の高い角度を求めることができる角度検出信号処理装置を提供する。
【解決手段】位相ロック部PLL1、PLL2において、検出対象の角度θ(t)ではなく、周波数ωotのオフセットを持った位相角ωot±θ(t)を追随するように位相ロック動作が行われる。そのため、角度θ(t)の周波数に対して励磁周波数ωotを十分高く設定すれば、位相ロック部PLL1、PLL2において追従する位相角ωot±θ(t)がゼロになるようなことはない。そのため、バイポーラVCOやアップダウン型カウンタなど、構成が複雑で回路規模が大きく、消費電力も大きい従来の装置構成を大幅に簡略化することができる。
(もっと読む)
エンコーダ・インターフェイス用のディスクリミネータをエイリアシングするための方法、装置およびコンピュータ・プログラム・プロダクト
【課題】 エイリアシングすることなくより高いエンコーダ速度で絶対位置を追跡することができる、改善されたエンコーダ・インターフェイスシステムを提供する。
【解決手段】 この装置および関連装置、方法およびコンピュータ・プログラム・プロダクトは、精度や的確さを損なうことなく、この演算を実行できる。この改善されたエンコーダ・インターフェイスシステムは、各サンプリング反復のための信号の位相角を予測し、次いで予測位相角と実際の測定位相角との間の角度差を測定して加速度を明らかにできる。従って、このシステムの予測キャパシティはエイリアシングの問題を最小限に抑える。この技術の結果、エイリアシングは、ナイキスト周波数のように、信号取得コンポーネントのサンプリング率に依存する、観察対象の加速度が所定のしきい値を超えた時にのみ生ずる。重要なことは、大半の場合、この加速度制限は、当該システムが受ける加速を大幅に越える。
(もっと読む)
エンコーダの故障検出
ほぼゼロに近い回転速度でのエンコーダの故障を検出するためのエンコーダ故障検出システムおよび方法。例えば、一つの実施形態において、トルクコマンドが、少なくとも10秒以上の継続時間を有する選択された期間にわたって、選択された閾値を超え、この選択された期間の間に、ロータの運動が検出されない場合、故障が表示される。本システムおよび方法は、モータ車両の他、インクリメントエンコーダを用いる他のシステムにも適用され得る。  (もっと読む)
(もっと読む)
磁気エンコーダ
【課題】 部品点数を増加することなく、正転又は逆転の回転方向を判別可能な磁気エンコーダを提供する。
【解決手段】 磁界を検出する検出手段2に対して回転し、一対の磁極の幅狭ピッチ3,4と一対の磁極の幅広ピッチ5,6とが連続した着磁パターンを少なくとも2つ繰り返したトラック7を有する。
(もっと読む)
101 - 120 / 122
[ Back to top ]