
Fターム[2F103FA01]の内容
Fターム[2F103FA01]に分類される特許
1 - 20 / 96
光ファイバセンサ
【課題】光干渉信号出力をセンサ信号とするセンサには、構成が簡単で、センサ部分の無電源化が可能なホモダイン干渉方式があるが、安定な動作を得るには、使用部品に対し厳しい工作精度と熱膨張対策が必要であると共に、センサ信号として変動できる位相範囲は±90度以内に限られていた。
【解決手段】干渉計の入力を周期性光パルスとし、参照光パルスの前半と後半で位相を90度(直交位相)異なる位相とし、計測光パルスと干渉させることにより、90度異なる2つの干渉出力値i1、i2を得て、その参照光と計測光の値r、sとから、参照光と計測光の位相差をθとして、2つの余弦値cosθ1、cosθ2を算出して余弦曲線上に位置を定め、その角度θ1、θ2を求めることによって、干渉光の強度変動、位相動作点変動の影響を除外するとともに、1周期前との角度の差分を積算して、センサ出力とすることにより、センサ信号として変動できる位相範囲が、±90度(半波長)を超えることを許容する光ファイバセンサを提供する。
(もっと読む)
エンコーダおよびこれを備えた装置

【課題】エンコーダにおいて、三角関数演算の回数を削減する。
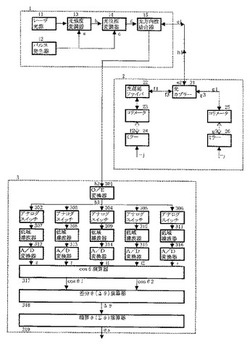
【解決手段】エンコーダは、周期パターン11が設けられたスケール10と、スケールとの相対移動が可能であり、周期パターンを読み取って、それぞれ周期パターンに応じた変化周期を有し、かつ互いに位相が異なる複数のアナログ信号を出力するセンサ20と、該センサから出力された複数のアナログ信号を時分割でアナログ−デジタル変換して複数のデジタル信号を生成するA/D変換部30と、複数のデジタル信号から位相を検出する位相検出部60と、スケールとセンサとの相対移動速度と位相検出部により検出された位相とを用いて補正値を算出し、該補正値と位相検出部により検出された位相とから補正位相を算出する補正部70と、該補正位相を用いて、スケールとセンサとの相対移動方向での位置を求める位置検出部80とを有する。
(もっと読む)
エンコーダおよびこれを備えた装置
【課題】複数の周期パターンに対する検出部による検出周期を切り替えるエンコーダにおいて、位置検出の遅れを回避する。
【解決手段】エンコーダは、第1の周期パターン11および第2の周期パターン12が設けられたスケール10と、該スケールとの相対移動が可能な検出部22とを有する。検出部22は、第1の検出状態と第2の検出状態との切り替えが可能であり、第1の検出状態にて第1の周期パターンに応じた第1の信号を出力し、第2の検出状態にて第2の周期パターンに応じた第2の信号を出力する。処理部30,40は、検出部から取り込んだ第1および第2の信号の双方を用いて第1の絶対位置を算出する第1の処理を行った後、該検出部から取り込んだ一方の信号を用いて相対移動量を算出する。処理部は、第1の処理において最後に設定した検出状態と同じ検出状態の検出部から一方の信号を取り込む。
(もっと読む)
光全周エンコーダ及びモータシステム
【課題】製造を容易にしつつ小型化することが可能な、光全周エンコーダ及びモータシステムを提供すること。
【解決手段】回転軸AX上に位置する発光部111が一面側に配置された基板110と、基板110の他面側において回転軸AX周りに回転可能に配置され、回転軸AXを中心とし複数の回転スリットS2,S3を有する2つの回転トラックT2,T3を有するディスク140と、発光部111から照射された光を、ディスク140の外周方向のほぼ全域に向けて放射状に導き、回転トラックT2,T3に導く導光部120とを有し、導光部120は、回転トラックT2に間接的に対向する略リング状の照射入光面126を有し、該面126から回転トラックT2に向けて出射するために光を放射状に導くインクレ用第1導光部123等と、放射状に導いた光の一部を回転トラックT3に導くアブソ用第2導光部1293と、を有する。
(もっと読む)
光学式エンコーダ装置
【課題】本発明は、受光手段により検出された変位信号の高調波成分を、従来より少ないスリットパターン数で、変位信号の振幅低下を低減しつつ、より効果的に除去することができる光学式エンコーダ装置を提供する。
【解決手段】本発明による光学式エンコーダ装置は、第2のスリットに設けられているスリットパターンが、2つのスリットパターンを有し、各パターン部の透過部は互いに第1のスリットのピッチの1/3の透過スリット幅をもち、かつ互いに1/12の位相差をもち、高調波成分を効果的に除去されるように配置されていることを特徴とする光学式エンコーダ装置。
(もっと読む)
位置検出方法、及び位置検出装置
【課題】雰囲気温湿度が変化するような場合でも、高精度の位置測定を行うことができる位置測定装置を提供する。
【解決手段】コリメートレンズ2を透過した光のうち、ビームスプリッタ3で反射された光は、集光レンズ8により、CCD9の受光面に集光される。光源1が振動して光ビームの位置が変われば、CCD9に入射する光ビームの位置が変化するので、CCD9の出力変動から、光ビームの振動中心を知ることができる。制御装置10は、この振動中心を検出し、振動中心が予め定められた位置となるように、光源1を加振しているピエゾ素子11に印加する電圧を制御する。
(もっと読む)
エンコーダ装置、及び装置
【課題】スケールの位置情報を高精度に検出する。
【解決手段】エンコーダ装置は、照射光を射出する光源部と、少なくとも移動方向に光源部と相対的に移動可能であって、照射光が入射され、移動方向に沿って形成されたパターンを有するスケールと、照射光を変調させる変調信号と、変調信号に応じた参照信号とを生成する変調部と、照射光を受光して、受光した照射光に応じた受光信号を出力する受光部と、参照信号を遅延させて遅延参照信号を生成する遅延信号生成部と、遅延信号生成部によって生成された遅延参照信号と受光信号とに基づいて、移動方向におけるスケールの位置情報を検出する位置検出部と、を備える。
(もっと読む)
エンコーダ
【課題】被計測物の絶対位置を高精度に計測可能なエンコーダを提供する。
【解決手段】エンコーダ100は、被計測物とともに移動可能に構成されたスケール1と、異なるピッチのパターンを有するトラック11と、スケール1に対する相対的な変位を検出して第1および第2の2相正弦波信号を出力する第1および第2のセンサ21、22と、第1および第2の2相正弦波信号に基づいて前記第1および第2のセンサ21、22に対応する第1および第2の位相をそれぞれ算出する位相演算手段31、32、61、62と、第1および第2の位相の位相差に基づいて被計測物の粗位置を計測する粗位置計測手段41と、被計測物の粗位置に基づいて第1および第2の2相正弦波信号に含まれる位相差誤差を補正する補正手段51、52と、補正手段51、52で補正された第1および第2の2相正弦波信号に基づいて被計測物の絶対位置を計測する位置計測手段71とを有する。
(もっと読む)
信号処理装置及び計測装置
【課題】安価で信頼性の高い信号処理装置を提供する。
【解決手段】被計測物の変位に応じた複数の周期信号に基づいて、前記変位に係る波数および位相の組み合わせを得る信号処理装置であって、前記複数の周期信号のサンプリング毎に該複数の周期信号から位相を得る第1手段と、サンプリング毎に前記第1手段により得られた位相に基づく波数および位相の組み合わせに対して回帰演算を行うことにより、サンプリング間隔における前記位相の変化量を得る第2手段と、第1サンプリングでの前記組み合わせに前記変化量を加算して第2サンプリングでの前記組み合わせを予測する第3手段と、前記第1手段により得られた前記第2サンプリングでの位相から、前記第3手段により予測された前記組み合わせの予測誤差を得る第4手段と、前記第3手段により予測された前記組み合わせに前記予測誤差を加算して前記第2サンプリングでの前記組み合わせを得る第5手段とを有する。
(もっと読む)
遠隔から非接触でビーム発射および信号検知を行う受動読取ヘッドを有する光学式エンコーダ
【課題】受動読取ヘッドを有する光学式エンコーダを提供する。
【解決手段】受動読取ヘッドは、接続ケーブルを有さず、ただの光学式読取ヘッドである。スケールに対する相対位置を示す測定位置情報は、遠隔随伴部に通じる見通し線によって遠隔的に読み取られる。遠隔随伴部は、光源と、検出部と、を備える。検出部は、遠隔レンズ部と、光検出機構部と、を有していてもよい。遠隔随伴部は、受動読取ヘッドから得られる像領域の輝度(明暗)を光学的に検知し、検知した輝度(明暗)に基づいて、測定位置を示す複数の信号を出力する。
(もっと読む)
角度測定方法及び角度測定システム
【課題】回転角度を高精度且つ短時間で測定すること。
【解決手段】回転が規制された非回転体であるエンコーダ本体2aと、エンコーダ本体2aに回転自在に軸支された回転体である回転軸3とを有し、エンコーダ本体2aに対する回転軸3の相対的な回転角度を検出する相対的角度検出手段としてのロータリエンコーダ2と、エンコーダ本体2aの絶対的な回転角度を検出する絶対角度検出手段としての非接触角度検出手段20とを備える。これにより、ロータリエンコーダ2が検出した回転角度を、非接触角度検出手段20で検出した回転角度に基づいて補正することができ、回転角度を高精度且つ短時間で測定することが可能となる。
(もっと読む)
変位センサ
【課題】一次元のスケール格子に対するスケール光結像系の二次元の変位を検出でき、構造が簡単な変位センサを提供する。
【解決手段】X方向に配置されたスケール格子110から結像系190にZ軸にほぼ平行なスケール光成分OP1A、OP1Bを射出し、Z方向に平行な光路OP1に沿って伝播した当該スケール光成分を受光した検出部201は、X方向の変位を示す変位信号を出力し、スケール格子110から結像系190にZ軸から傾いた方向にほぼ平行にスケール光成分OP2A、OP2Bを射出し、Z方向から傾いた光路OP2に沿って伝播した当該スケール光成分を受光した検出部202は、X方向の変位とZ方向の変位とを含む変位信号を出力する。
(もっと読む)
エンコーダ
【課題】大型化を招かずに広範囲で絶対位置信号を高精度に取得可能なエンコーダを提供すること
【解決手段】エンコーダにおいて、スケール20のパターンは、|(m・P1−n・P2)|<|(P1−P2)|を満たすように移動方向であるX方向に垂直なY方向に周期的に配列され、X方向に第1の変調周期P1と第2の変調周期P2を有する。エンコーダの信号処理手段30は、第1の変調周期P1の位相である第1の位相Φ1を取得する第1の位相取得手段32と、第2の変調周期P2の位相である第2の位相Φ2を取得する第2の位相取得手段33と、整数m、nに対し、A/B=n/mの関係を満たす2つの係数A、Bを用いてSv=A・Φ1−B・Φ2を満たすSvを前記スケールの位置を表す位置信号として取得する位置情報取得手段34と、を有する。
(もっと読む)
エンコーダ、及びアクチュエータ
【課題】エンコーダの低コスト化を図りつつ、エンコーダの信頼性を向上する。
【解決手段】エンコーダ27は、起動時等にスライダが停止した状態で、独立して点灯される複数の光源を用いて複数の絶対位置を検出し、この複数の絶対位置の差が所定範囲内に収まっているかどうかに基づいてエラーの判定を行うことで、高い信頼性を確保する。これとともに、エンコーダ27は、起動後は、インクリメンタルスケール51を用いインクリメンタルエンコーダとして用いられることで、低コスト、及びコンパクトな構成とすることができる。
(もっと読む)
サーボモータ製造方法、サーボモータ製造装置、サーボモータ、エンコーダ
【課題】受光素子を備えた光学モジュールと回転ディスクとが比較的大きく離れて配置されていても、回転ディスクや光学モジュールの位置調整を精度良く行いつつ、サーボモータを容易に製造できるようにする。
【解決手段】回転ディスク110に形成した同心円パターンCPに対向して配置したリニアエンコーダ160の出力信号に基づき、シャフトSHの回転軸AXと回転ディスク110のディスク中心Oとが一致するように回転ディスク110の位置を調整する。また、光学モジュール120が同心円パターンCPからの反射光を受光する位置調整用受光素子群150L,150Rを基板121上に備える。位置調整用受光素子群150L,150Rの各出力信号の振幅変化に基づき、光学モジュール120の半径方向位置を調整する。また、位置調整用受光素子群150L,150Rの各出力信号の位相差に基づき、光学モジュール120の傾斜方向の位置を調整する。
(もっと読む)
光電式エンコーダ及びそのアライメント調整方法
【課題】検出ヘッドのアライメント調整が容易な光電式エンコーダ及びそのアライメント調整方法を提供する。
【解決手段】光電式エンコーダは、測定軸方向に所定ピッチで回折格子が形成されたスケールと、このスケールに対して相対移動可能に配置され、スケールに光を照射する照射部、並びにスケールの回折格子で反射または透過された光を、それぞれ異なる位相において受光する複数の受光部を備えた検出ヘッドと、この検出ヘッドの受光部からの受光信号を処理して2相信号を生成する信号処理装置とを備える。信号処理装置は、2相信号のリサージュ半径に対応したアライメント調整用のモニタ信号を算出することで、前記スケールに対して前記検出ヘッドを静止させた状態で該検出ヘッドのアライメント調整を可能とする。
(もっと読む)
変位計測装置
【課題】クロストークによる検出誤差を軽減し、移動体の高帯域速度変動を高精度に検出することができる変位計測装置を得る。
【解決手段】移動体に設けた光学的に識別可能なマークを照明する第1の発光部と前記マークを介した光を検出する第1の受光部とを備える第1の検出部と、前記第1の検出部に対して前記移動体の移動方向に所定の間隔を隔てて配置され、前記マークを照明する第2の発光部と前記マークを介した光を検出する第2の受光部とを備える第2の検出部と、前記第1の発光部と、前記第2の発光部を時分割で発光させる時分割発光手段と、前記マークのうち同一のマークを前記第1、第2の検出部で各々検出する第1のタイミングと前記第1のタイミングと異なる第2のタイミングを検出する検出手段と、前記検出手段で得られた前記第1のタイミング及び前記第2のタイミングを用いて前記移動体の移動速度を算出する速度算出手段と、を有する。
(もっと読む)
エンコーダ装置、光学装置、露光装置、露光方法およびデバイス製造方法
【課題】小型であり、かつ構成部材の位置合せが容易なエンコーダ装置を提供する。
【解決手段】エンコーダヘッド20は、光源部からの計測光をスケール5(回折格子)に向けて反射させる第1プリズム21と、第1プリズム21により反射された計測光を二つの直線偏光に分割する偏光ビームスプリッタ膜22と、偏光ビームスプリッタ膜22を透過した直線偏光を円偏光に変換してスケール5上の一方の位置に照射させる第1波長板23と、偏光ビームスプリッタ膜22で反射した直線偏光を円偏光に変換してスケール5上の他方の位置に照射させる第2波長板24と、スケール5で反射回折した±1次回折光を干渉させて光検出器に向けて反射させる第2プリズム25とを有し、偏光ビームスプリッタ膜22が第1プリズム21と第2プリズム25に挟まれて設けられ第1プリズム21、第2プリズム25および偏光ビームスプリッタ膜22が一体に形成されていることを特徴とする。
(もっと読む)
位置検出装置
【課題】 2次以上の回折光および迷光の発生を抑え、位置検出信号のS/N比を改善し検出精度の向上を図る。
【解決手段】 屈折率nの保護層12で格子面11aが覆われた回折格子11のピッチをd、照射される可干渉光の真空中の波長をλ0とした時、d<2λ0/n とし、上記回折格子11への可干渉光の入射角θ0を
|sinθ0|<(2λ0/dn)−1
なる式を満たす角度に設定し、1次回折光を位置検出に使用する。
(もっと読む)
エンコーダ、サーボモータ、サーボユニット及びエンコーダの製造方法
【課題】回折干渉光を利用して分解能を向上させつつ、製造等を容易にすることが可能な、エンコーダ、サーボモータ、サーボユニット及びエンコーダの製造方法を提供する。
【解決手段】
回転格子が形成されたリング状の第1トラックTA及び第2トラックTBを有するディスク110と、第1トラック及び第2トラックに対向して固定配置され、固定格子を有して回折干渉光を検出する第1検出部130A及び第2検出部130Bと、を有し、第1トラックの複数のスリットは、湾曲スリットとして形成され、第1トラックに対向する第1検出部は、第2検出部が対向する位置におけるスリットの接線LINEBに対して、第1トラックの回折格子に含まれるスリットの接線LINEAが平行となる位置に配置される。
(もっと読む)
1 - 20 / 96
[ Back to top ]