
Fターム[2F112BA07]の内容
Fターム[2F112BA07]に分類される特許
121 - 140 / 273
相関演算方法、相関演算装置、焦点検出装置および撮像装置

【課題】同一性が崩れている一対のデータ列に対しても一対のデータ列の相関量が最小になるシフト量を正確に算出する。
【解決手段】複数の第1データが一次元上に展開された第1データ列と、複数の第2データが一次元上に展開された第2データ列とを一次元上で相対的な変位量を変えながら変位させ、第1データ列と第2データ列との間の相関量を演算して相関量の極値が得られる変位量を求める相関演算方法において、第1データ列と第2データ列とが相対的に変位された状態において対応する第1データと第2データとの比の変化が、一次元上の位置によらず等しいとして第1データ列と第2データ列との間の類似性を表す評価量を導出し、該評価量を一次元上の所定位置の近傍における第1データと第2データとの間の演算として定義し、所定位置を一次元上の所定区間に亘って移動させて評価量を積算した量を相関量とする。
(もっと読む)
車両用距離画像データ生成装置および車両用距離画像データの生成方法

【課題】 自車両前方の状況を連続的に把握できる車両用距離画像データ生成装置および車両用距離画像データの生成方法を提供する。
【解決手段】 投光器5と、イメージインテンシファイア7b及び高速度カメラ8とこれらを制御するタイミングコントローラ9と、イメージインテンシファイア7b及び高速度カメラ8により得られたターゲット距離の異なる複数の撮像画像における同一画素の輝度に基づいて、画素毎の物体までの距離を表す距離画像データを生成する画像処理部10を備え、画像処理部10は、常時発光しているために全ての撮像画像に存在する画素データを、ノイズとして除去するステップS5の処理を備えた。
(もっと読む)
車両用距離画像データ生成装置
【課題】 自車両前方の状況を連続的に把握できる車両用距離画像データ生成装置を提供する。
【解決手段】 自車両前方に所定周期でパルス光を投光する投光器7と、撮像エリアに応じて設定される撮像タイミングで撮像エリアから帰ってくる反射光を撮像する高速度カメラ8と、撮像エリアが連続的に変化するように撮像タイミングを制御するタイミングコントローラ9と、高速度カメラ8により得られた撮像エリアの異なる複数の撮像画像における同一画素の輝度に基づいて、画素毎の物体までの距離を表す距離画像データを生成する画像処理部10と、を備え、画像処理部10は、パルス光を投光せずに自車両前方を撮像した外乱光ノイズ除去用のフィルタ画像に基づいて、各撮像画像の輝度を補正する。
(もっと読む)
校正基準点作成装置、校正基準点作成方法およびコンピュータプログラム
【課題】撮影領域が広くても、ステレオ撮影にて取得した画像データの三次元の校正を実行するための基礎データを簡易に取得する。
【解決手段】広がりのない光を照射可能な第一直光発光装置と、第一直光発光装置が照射する光に対して複数のカメラの撮影領域内において交点をなすように広がりのない光を照射可能な第二直光発光装置と、第一直光発光装置および第二直光発光装置を撮影領域内で移動させる移動手段と、第二直光発光装置と第一直光発光装置との中間点をマーキングするマーキング装置と、マーキングの絶対位置またはマーキングの複数のカメラとの相対位置に関する情報を取得する位置情報取得手段と、位置情報取得手段によるマーキングの絶対位置またはマーキングの複数のカメラとの相対位置に関する位置情報に基づいて、第一直光発光装置および第二直光発光装置による光の交点の位置を特定する光交点位置情報特定手段とを備える。
(もっと読む)
変位検出装置、露光装置、およびデバイス製造方法
【課題】 例えばガラス基板の表面に付着した異物の影響を抑えて、その裏面の面位置の変位を高精度に検出することのできる変位検出装置。
【解決手段】 被検面(20a)の面位置の変位を検出する変位検出装置は、第1乃至第3の光(L1,L2,L3)を被検面の第1乃至第3位置へそれぞれ導いて被検面またはその近傍に第1乃至第3の集光点を形成するための、第1乃至第3の光に共通の光学系(3,4,5)と、被検面で反射された第1乃至第3の光に基づいて第1乃至第3位置における第1乃至第3変位情報をそれぞれ検出し、該3つの変位情報のうちの互いに最も類似した2つの変位情報に基づいて被検面の面位置の変位を検出する検出系(DS:5,4,3,6,7,8,9)とを備えている。
(もっと読む)
光検出装置及び光検出方法
【課題】投光した光の情報の検出精度を向上させる。
【解決手段】光を投光する投光装置1と、投光する光の変調周波数を算出する変調周波数算出部32と、投光手装置1から投光された光を撮像する撮像装置2と、変調周波数算出部32により算出された変調周波数に基づいて、光の情報の検出に影響を及ぼす周波数を算出する周波数算出部33と、撮像装置2により撮像された撮像情報から周波数算出部33により算出された周波数の情報を除去し、撮像情報に含まれる光の情報を検出する同期検波処理部37とを備える。
有する車載警報装置。
(もっと読む)
物体検出装置及び測距方法
【課題】レーダ受信信号から直接計測することができない遠方に存在する対象物体までの距離を高い精度で演算する物体検出装置を提供する。
【解決手段】
【請求項1】車載のカメラ10の撮像画像の情報に基づいて、測距対象となる対象物体と測距の基準とする基準物体との相対位置関係を算出する物体間相対位置算出部30と、車載のレーダ測距装置20により取得された受信信号に基づいて、測距の基準として選択された基準物体と自車両との間の基準距離を求める基準距離計測部40と、レーダ測距装置20が対象物体までの距離を測距できない場合は、対象物体と基準物体との相対位置関係と自車両から基準物体までの基準距離とに基づいて自車両から対象物体までの距離を演算する距離演算部50とを有する。
(もっと読む)
測距装置
【課題】背景光による測定誤差の少ない少数ロットのシステムを安価に組み立てられる測距装置を提供する。
【解決手段】発光ダイオード11から出力した検知光を測定対象A1に向かって射出し、検知光の反射光をレンズ13で収束してリニアセンサ14の検知面14aに収束スポットSPを形成させる。演算素子15は、リニアセンサ14からシリアルデータで出力される102個の受光素子18のそれぞれの受光量の数値データを用いて収束スポットSPの受光量ピークを識別して、測定対象A1までの距離を演算し、演算結果を出力端子OUT1〜OUT4を通じて4ビットのパラレルデータで出力する。
(もっと読む)
車両周辺監視装置、車両、車両周辺監視プログラム
【課題】撮像装置を通じて対象物の検出される一方、レーダを通じてこの対象物の存在が明確に認識されない場合でも、車両からこの対象物までの距離を高精度で測定することができる装置等を提供する。
【解決手段】本発明の車両周辺監視装置10によれば、赤外線カメラ(撮像装置)11の撮像領域を構成する一の対象領域において複数の対象物が検出され、かつ、各対象物について異なる測定距離が測定された場合、第1対象物の測定距離が、レーダ装置12により取得された反射強度データに基づき、反射強度が最高のピークを示す「第1距離」に補正される。また、当該複数の対象物のうち第i+1対象物(i=1,2,‥)の測定距離が、反射強度データに基づいて第i+1対象物の測定距離を基準とし、かつ、第1距離ないし第i距離のすべてを包含しない第i+1距離範囲において反射強度が最高のピークを示す「第i+1距離」に補正される。
(もっと読む)
測距用画像選択機能を有する測距装置
【課題】赤外線光量の小さい環境や、赤外線の反射率の低い対象物の場合、赤外線ステレオカメラによる測距はテクスチャ情報が少ないため測距精度が低くなる。この場合、可視光量は多く、可視光線の反射率は高い対象物であれば、可視光ステレオカメラを用いることでテクスチャ情報が増加し、精度の高い測距が可能になる。一方、赤外線光量が多く、赤外線の反射率の高い対象物であり、可視光量は少なく、可視光線の反射率は低い対象物であれば上記と逆の状況になる。
【解決手段】赤外線ステレオカメラ(3)と可視光ステレオカメラ(5)とを両方具備し、周辺の光量もしくは相関演算の一致度評価値に応じて上記2つのカメラを切替えることにより、周辺光量の変化による測距精度のばらつきが低減される。
(もっと読む)
車両用環境認識装置
【課題】一対のカメラの明るさのバランスが崩れるような環境下においても有効にステレオマッチング処理を行って自車両の周囲の環境を認識することが可能な車両用環境認識装置を提供する。
【解決手段】車両用環境認識装置1は、自車両Aの周囲の環境を撮像して基準画像TOと比較画像TCとを出力するステレオ撮像手段2と、基準画像TOと比較画像TC、または基準画像TO等に対して前処理が施された2つの画像に基づいて第1距離画像TZ1を形成する第1ステレオマッチング手段7aと、基準画像TO等に対して異なる前処理が施された2つの画像に基づいて第2距離画像TZ2を形成する第2ステレオマッチング手段7bと、第1、第2距離画像TZ1、TZ2に基づいてそれぞれ基準画像TO上に物体を検出する検出手段11と、第1、第2距離画像TZ1、TZ2に基づく物体の各検出結果のいずれを採用するかを選択する選択手段12と、を備える。
(もっと読む)
対物距離計測方法及び装置
本発明に係る方法は、計測対象物(20)までの距離(d)を計測する方法であり、発光器(12)からビーム光(18)を出射するステップと、計測対象物(20)で反射されたビーム光(24)を受光器(14)に入射するステップと、その出射(18)から入射(24)までのビーム光伝搬時間から距離(d)を求めるステップと、ビーム光(18)の出射に際し方形波変調信号(66,74)に従いそのビーム光(18)を振幅変調するステップと、を有する。使用する方形波変調信号(66,74)は、それぞれ複数個の方形パルス(68,68’)からなる複数個の方形パルス群(76,76’)を含む信号(66,74)である特に、本方法では、それら方形パルス群(76,76’)間の時間間隔(PA)を変動させると共に、それらの方形パルス群(76,76’)内の方形パルス(68,68’)の個数を変動させる。 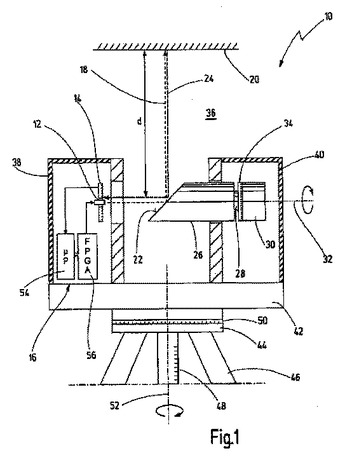 (もっと読む)
(もっと読む)
3次元形状測定器
【課題】レーザ光の照射位置における戻り光の正確な光量による計測が可能な形状測定装置を有する3次元形状測定器を提供すること。
【解決手段】レーザダイオード2と、第1光学系と、照射位置移動手段と、エンコーダ6aと、第2光学系と、CCDラインセンサ部13と、入射光量測定手段とを有し、検知手段から出力された検知信号により所定時間の間隔を有する複数のタイミング信号が生成され、タイミング信号によってCCDのリセットタイミングが制御されており、一のタイミング信号後に確認用レーザ光をレーザダイオード2から照射し、確認用レーザ光の光量を入射光量測定手段により測定し、入射光量測定手段により測定された確認用レーザ光の光量から測定用レーザ光の発光量が決定される。
(もっと読む)
距離測定装置及びプロジェクタ
【課題】 正確な距離測定が可能であって測定可能な距離の範囲が広く、又機構の調整を容易に行える距離測定装置と、該距離測定装置を備えたプロジェクタを提供する。
【解決手段】 プロジェクタは、光源装置と、当該光源装置からの光を表示素子に導光する光源側光学系と、表示素子と、該表示素子から射出された画像をスクリーンに投影する投影側光学系と、距離測定装置1とを備え、光源装置や表示素子を制御するプロジェクタ制御手段を有しているものである。そして、この距離測定装置1は、レーザー光を測距対象に照射するレーザー発光器2と、測距対象からの反射光を集光する受光レンズ4と、この受光レンズ4を透過した測距対象からの反射光を受光する受光素子3と、を有し、レーザー発光器2からの射出レーザー光の光軸位置に受光レンズ4の受光領域を位置させているものである。
(もっと読む)
画像対応点探索装置ならびにそれを用いる測距装置および画像動き検出装置
【課題】ステレオカメラからの入力画像間の対応点をサブピクセル単位で探索し、三次元計測を行うにあたって、高速かつ精度の良い対応点探索を行えるようにする。
【解決手段】演算処理装置5に、基準画像上の注目点に対する参照画像上の複数の対応点候補位置における類似度演算結果を元に、最も類似度の高い位置を検出する類似度ピーク探索部11と、求められた位置周辺の対応点候補位置およびその類似度から、サブピクセル対応位置を演算するSAD法による第1のサブピクセル対応位置演算部12と、2つの入力画像に設定したウインドウ内のパターンを周波数分解し、振幅成分を抑制した信号の類似度に基づいてサブピクセル対応位置を演算するPOC法による第2のサブピクセル対応位置演算部13と、前記類似度ピーク探索部11で求められた類似度ピーク位置における類似度の信頼度に応じて2つの演算部12,13を選択する選択部14とを設ける。
(もっと読む)
クロマティックポイントセンサの動作方法、及び、クロマティックポイントセンサ
【課題】クロマティックポイントセンサに改良された精度とロバスト性を与える。
【解決手段】距離測定はプロファイルデータの決定されたピーク位置指標座標ppicと共に変化する方法で選択された強度プロファイルデータの距離を示す下位セットに基づく。ppicはプロファイルデータピークの位置を指示する。特定のppicを持つプロファイルデータに対して、その距離を示す下位セットが同じ特定のppicによって指示される特定の指標に固有なデータ限定パラメータに基づいて選択される。特定のppicによって指示された指標に固有なデータ限定パラメータの各セットが、そのppicを持つプロファイルデータに対応する距離校正動作に際して使われる距離を示すデータの下位セットを特徴付ける。データの距離を示す下位セットが全体的な強度の変動及び検出器バイアス信号レベルの変動に係わらず校正動作の間に使われる対応する距離を示すデータの下位セットと同様に補償される。
(もっと読む)
物体検出装置
【課題】ステレオマッチング処理を行い、外界の環境の変化と、ワイパや付着物等によるノイズとを的確に判別して物体を検出することができる物体検出装置を提供する。
【解決手段】物体検出装置1は、基準画像TOと比較画像TCとを出力するステレオ撮像手段2と、ステレオマッチング処理を行うステレオマッチング手段7と、基準画像TO上に物体Oを検出する物体検出手段10と、前回フレームでの基準画像TO上の物体Oの距離Z等とに基づいて、今回フレームにおける当該物体Oの予測領域ROest、RCestを基準画像TOと比較画像TCに設定する予測領域設定手段11と、予測領域の輝度値の平均値p1ij_ave、p2ij_aveの差の絶対値が所定の閾値Δpth以上である場合には基準画像TO上の予測領域ROestに検出された物体Oの情報または物体Oが検出されなかったという情報にノイズが含まれている旨の情報を対応付ける判断手段12とを備える。
(もっと読む)
人体検知センサ
【課題】誤検出を防止して検知エリア内の人を確実に検出できるようにした人体検知センサを提供する。
【解決手段】人体検知センサ1は、対象空間に強度が周期的に変化する強度変調光を照射する発光源5、および、受光光量に応じた電気出力を発生する複数個の感光部が配列されて対象空間を撮像する光検出素子3を具備し、画素値が距離値である距離画像を生成する距離画像センサ部2と、距離画像センサ部2の距離画像をもとに検知エリアにおける人の存否を検出する信号処理回路10とを備える。信号処理回路10は、水平面内を距離画像センサ部2の設置位置を中心とする同心円状の境界で複数のエリアに分割し、各々のエリア毎に各エリアに対応する画素の画素値の上限値を、設置位置から遠いエリアほど上限値が大きくなるように段階的に設定することで、略一定の高さまでの範囲を検知エリアから外している。
(もっと読む)
物体検出装置および接触回避システム
【課題】自車両の周囲に存在する物体を検出し、検出した物体が自車両と接触してもよいものか否かを適切に判断することが可能な物体検出装置を提供する。
【解決手段】物体検出装置1は、自車両Aの周囲に存在する物体までの距離Znの情報を収集する距離情報収集手段9と、収集された距離Znの情報に基づいて互いに隣接する距離Znの情報をグループ化して物体を検出する物体検出手段11と、検出された物体ごとに、当該物体に属する距離Znの各情報の平均値Zaveを算出してばらつき量Zdifを算出するばらつき量算出手段12と、当該物体に属する距離Znの各情報についてその右側または左側の近接する情報との差の絶対値の平均値ΔZaveを算出する距離差平均算出手段13と、検出された物体ごとに算出されたばらつき量Zdifおよび前記平均値ΔZaveに基づいて、自車両Aが当該物体と接触可能であるか否かを判断する判断手段14と、を備える。
(もっと読む)
距離計測装置、距離計測方法および車両
【課題】背景光の周波数が変化しても、被検物までの距離を正確に計測できる距離計測装置を提供する。
【解決手段】所定周波数で変調された光を照射する投光装置1と、照射された光の反射光を撮像する撮像装置2と、撮像装置2で得られた撮像信号の同期検波を行う同期検波処理部32と、同期検波によって得られた信号に基づいて被検物までの距離情報を求める距離算出部33と、撮像装置2で得られる撮像信号に基づいて、この撮像信号に含まれる周波数成分と識別可能な照射光の周波数を求める照射周波数算出部34と、その照射光の周波数によって投光装置1の所定周波数を変更する駆動制御部31とを備える。
(もっと読む)
121 - 140 / 273
[ Back to top ]