
Fターム[2F112FA41]の内容
Fターム[2F112FA41]に分類される特許
301 - 320 / 331
物体検出装置
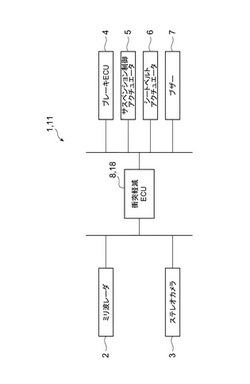
【課題】 2つの検出手段のうちの一方の検出手段で物体を検出できない場合でも検出対象の物体を設定することができる物体検出装置を提供することを課題とする。
【解決手段】 レーダによる情報と画像による情報に基づいて物体を検出する物体検出装置1であって、レーダによって物体を検出するレーダ検出手段2と、画像によって物体を検出する画像検出手段3と、レーダ検出手段2によって検出した物体の位置情報と画像検出手段3によって検出した物体の位置情報に基づいてレーダ検出手段2によって検出した物体と画像検出手段3によって検出した物体とが同一物体か否かを判断する判断手段8とを備え、2つの検出手段2,3の一方の検出手段で過去に同一物体と判断した物体を検出できない場合、当該過去に同一物体と判断した物体に設定された情報から求めた予測移動軌跡と他方の検出手段で検出した物体の位置情報とに基づいて同一物体か否かを判断することを特徴とする。
(もっと読む)
散乱光によるエラーを抑制するための方法及び光学センサー

【課題】 物体表面(13)上で反射されて、検知器で検知される光線(7)が、タイミングを合わせて作動される主光源(5)を用いて生成される、光学センサー(1)を提供する。
【解決手段】 光線(7)の散乱光によって引き起こされる可能性の有る擾乱作用を抑制するために、主光源(5)の送出休止期間の間に、補償用光源(25)が、主光源(5)の光線(7)の散乱光領域を包含する光円錐を放射する。こうすることによって、この散乱光領域内の物体が、補償用の光に対する成分を発生させ、この成分が、専ら光線(7)の散乱光によってセンサー出力が駆動されるのを防止するものである。
(もっと読む)
三次元計測機能つき内視鏡装置
【課題】対象物に既知の位置からスポット光を照射し、反射光をカメラで受けて三角測量を行う三次元計測において、ベースライン距離が短いにもかかわらず、量子化誤差を軽減し、距離分解能を向上させる。
【解決手段】1回の計測において、レンズ単体を移動させるか、レンズ及び撮像素子をともに移動させるか、カメラのレンズは固定したまま、撮像面を元の平面と平行に移動させることにより2以上の計測値を得て、これらの数値の統計的処理により量子化誤差を軽減する。
(もっと読む)
距離測定装置
【課題】 一つの撮像装置によって、撮像対象の物体と撮像装置との距離を簡易な画像処理で検出する。
【解決手段】 距離測定装置10Aは、位置、撮像方向の角度、撮像範囲が既知の撮像装置11と、撮像装置11からの映像情報を基準画像として記憶保持する基準画像記憶装置12と、撮像装置11からの新たな映像情報と基準画像記憶装置12からの基準画像の映像情報をの差分絶対値を映像情報1ライン毎に加算して1ライン毎の総計を出力する差分画像合算装置13と、1画面のライン数分の差分画像合算データから対象判定閾値以上の値を有する最大のライン番号Yを出力する第1ライン演算器14と、最大ライン番号Yをアドレスとして撮像対象の物体と撮像位置との距離を示す距離データを算出する距離テーブルメモリ15とを有している。
(もっと読む)
障害物検出装置
【課題】距離画像を用いて走行可能な経路か衝突を回避しなければならない障害物かを判別し、しかも処理負荷が小さく高速な処理を可能な障害物検出装置を提供する。
【解決手段】距離画像センサ11は、自律移動装置2が走行しようとする面を含む空間領域を斜め下向きに撮像し画素値が距離値である距離画像を生成する。差分画像生成部13は、距離画像センサ11で得られた距離画像と基準面の距離画像との差分画像を生成する。さらに、高さ画像生成部14は、差分画像のうち差分値が規定の距離閾値以上である領域について距離画像を基準面に投影し基準面からの高さ値を画素値とした高さ画像を生成する。第1および第2の2値化部15a,15bは高さ画像を2段階の閾値で2値化し、2つの2値画像を生成する。判断部16は、各2値画像において基準面からの高さ値が閾値以上である領域の面積を比較することにより障害物か否かを判断する。
(もっと読む)
移動対象物検出装置
【課題】 カメラにより得られる対象物像が画像の端部に接しているような場合において、対象物の相対的な移動方向を誤って検出することを防止できる移動対象物検出装置を提供する。
【解決手段】 カメラ1Rにより得られる基準画像に含まれる対象物像が、基準画像の端部に接するときは、その対象物像の位置を代表する判定点が、対象物像の面積重心Gから、画像の中心に近い外接四角形の端部の点GEに移動され、該移動後の判定点に基づいて対象物の移動方向が検出される。
(もっと読む)
障害物検出装置、キャリブレーション装置、キャリブレーション方法およびキャリブレーションプログラム
【課題】変換パラメータの長期的変動に対応可能で、キャリブレーションを簡略化可能なキャリブレーション装置を提供すること。
【解決手段】画像を撮影する複数のカメラ101a、101bのうち一のカメラにおいて撮影された前記画像内の3次元空間上の任意の面上の点を、他のカメラから観察した画像内の前記面上の点に変換する変換パラメータを用いて、前記複数のカメラが撮影した画像から前記面上に存在する障害物を検出する障害物検出部121と、前記障害物までの距離を検出する距離検出部102が検出した前記障害物までの距離と、前記障害物検出部121が検出した前記障害物の前記画像上における位置座標とから、前記変換パラメータを補正する並進成分補正部123と変形成分補正部124とを備えた。
(もっと読む)
対象物判定装置
【課題】局所的な情報で路面と立体物とを区別して正確に判定する。
【解決手段】異なる視点の各々からカメラ10R,10Lにより対象物を撮影することにより、視差を有する左右画像を取得し、照合手段14で左右画像の各々において対応した点における視差を演算し、立体・路面判定手段16で、一方の辺が視差、他方の辺が画像の横方向の位置に各々対応し、かつ視差が大きくなるに従って視差に対応する辺及び横方向の位置に対応する辺が長くなるように定められたブロックを複数配列した視差マップの各々のブロックに、視差が演算された視差点に関する情報を投票し、近距離のブロックの情報に基づいてカメラの高さ及びピッチ角を更新し、更新されたカメラの高さ及びピッチ角及び遠距離のマップの情報に基づいて、縦断曲率を更新し、更新されたカメラの高さ及びピッチ角、及び更新された縦断曲率で定まる道路形状を示す方程式に基づいて立体か路面かを判断する。
(もっと読む)
画像処理装置
【課題】 視差計算処理の高速化を図る。
【解決手段】 第1画像と第2画像とに基づいて視差計算処理を行う視差計算部と、それぞれ上記視差計算処理に使用されるワーク画像を保持可能な第1バッファ及び第2バッファとを設け、上記視差計算処理として、上記第1画像と上記第2画像との引き算により第1差分画像を得る第1処理(S12)と、上記第1差分画像の画素値を加算平均する第2処理(S13)と、上記加算平均された画像と上記第1バッファ内のワーク画像とを比較し、小さい方の値によって上記第1バッファ内のワーク画像の画素値を更新する第3処理(S14)と、上記第1バッファ内のワーク画像と上記第2バッファ内のワーク画像との引き算により第2差分画像を得る第4処理(S15)と、上記第2差分画像の画素値を変換する第5処理(S16)とを含めることで、一般的な処理能力を有するCPUで十分に処理できるようにする。
(もっと読む)
画像処理装置、コンピュータプログラム、及び画像処理方法
【課題】 二つの撮像装置の撮像周期の同期ずれを算出して撮像画像を処理することができる画像処理装置、該画像処理装置を実現するためのコンピュータプログラム、及び画像処理方法を提供する。
【解決手段】 画像処理装置3は、ビデオカメラ1で撮像時点がt、t+Δ(Δは撮像周期)において撮像した第1撮像画像で共通の撮像対象に対応する第1特徴点及び第2特徴点を抽出し、ビデオカメラ2で撮像時点t+δ(δは同期ずれ)において撮像した第2撮像画像で同一撮像対象に対応する第3特徴点を抽出し、第3特徴点に対応する対応点を特定し、第1特徴点、第2特徴点、対応点、及び撮像周期に基づいて、前記第1撮像画像及び第2撮像画像の同期ずれを算出する。
(もっと読む)
コンボリューションカーネルを利用したラインパターンの処理方法、ラインパターンの処理装置及びラインパターンの処理方法を実行するためのプログラムを記録した媒体
【課題】構造化光によって生成されたイメージでラインパターンを処理してノイズを除去することを目的とする。
【解決手段】所定の位置に形成された単純ラインパターンを用いてイメージの縦区間別にカーネル状及び最適のスレショルド値を決定するカーネル学習部260と、決定されたカーネル状及び最適のスレショルド値を用いて、捕捉された実際テストイメージにコンボリューションを適用するコンボリューション適用部270と、コンボリューションが適用されたイメージに含まれたピクセルカラムを縦方向にスキャンしてピクセル値が0でない複数のピクセル群が存在する場合、これらのうち、選択された1つのピクセル群以外のピクセル群のピクセル値を0に設定する領域選択部280と、を含むラインパターン処理装置200である。
(もっと読む)
位相差検出方式による距離情報分布の取得方法、補正方法および表示方法
【目的】2次元配列(マトリックス)状の距離情報分布に関し、誤測距の恐れのある距離情報を排除または補正し、その経緯や結果について適切な表示をすることができる距離情報分布の取得方法,補正方法および表示方法を提供する。
【構成】位相差やその逆数に相当する距離といった距離データと、当該距離データに関する信頼性データ、特に画像データのコントラストに関する信頼性データを対として距離情報とし、信頼性の低い距離情報を排除もしくはその距離データを補正処理する。信頼性が低い距離データに対し、周囲の信頼性が高い距離情報の距離データのみを使って補正するため、補正された距離データの信頼性を確保することができる。また、この発明の距離情報分布の表示方法は、信頼性が高い距離データのみを表示するため、観察者にとって分りやすい表示を与えることができる。
(もっと読む)
測地距離データを得る方法及び装置
この発明に従って、一つ又は数個の目標に光信号が発射されて、それにより測地距離データを得る。送信器(1”)及び受信器(4”)等の装置要素が、目標(3a、3b)に基づいて、線形の時間的独立のシステムとして設けられる。そのシステムは、信号s(t)により励起され、そのシステム応答y(t)が記録される。遅れ計又は位相計とは相違して、この距離データは、このシステムの応答における遅れと信号形状から得られる。  (もっと読む)
(もっと読む)
視覚検知による全天候障害物衝突防止装置とその方法
【課題】昼頃でも夜間でも障害物を識別でき、視覚センサーの定位を自動的に回復できる視覚検知による全天候障害物衝突防止装置とその方法を提供する。
【解決手段】系統キャリヤー24に使用され、視覚センサー22と計算ユニット26とを含む。視覚センサー22は、複数の映像を取出すことにより障害物を識別する。計算ユニット26は、複数の映像を分析する機能と、障害物の存在を判断する機能と、衝突防止対策を実施する機能とを有する。全天候障害物衝突防止方法は、複数の映像を取出して分析するステップと、視覚センサー22を定位するステップと、障害物を識別するステップと、系統キャリヤー24の絶対速度を取るステップと、系統キャリヤー24と障害物との間の相対距離および相対速度を取るステップと、衝突防止対策を実施するステップとを含む。
(もっと読む)
距離計測装置及び距離計測方法
【課題】コストを抑え、高速、かつ高精度な距離計測を行うことができる距離計測装置及び距離計測方法を提供する。
【解決手段】2つのカメラによって撮影対象物(対象物)を撮影する撮影手段104と、画像の画質改善処理を行う画質改善手段106と、画質改善された画像に基づき、画像上における対象物の位置情報を検出する検出手段107と、検出された対象物の位置情報に基づき、処理対象となる画像上の画像領域を限定し、2つのカメラによって撮影された2つの画像に対して、輝度変化を強調する処理を行う補正処理手段108と、限定された画像領域において、補正処理された2つの画像間の対応点を探索し、視差画像情報を生成する視差画像情報生成手段109と、生成された視差画像情報に基づき視差値を求め、撮像手段と撮影対象物との間の距離を算出する距離算出手段110とを備える。
(もっと読む)
パルスレーザ測距装置およびその測定方法
【課題】外乱に対する信頼性のより高い携行式パルス反射型レーザ測距装置を得る。
【解決手段】測定パルス6と基準パルス7との間の時間差τによって測定対象4までの距離Xを計算するため、マイクロコントローラ2により制御されるアルゴリズム3と、および複数の繰り返しパルス列の時間差τを計算する重畳モジュール5とを有し、重畳モジュール5は、トリガ周波数fTRIGGER で周期的に重畳を行うものとした携行式のパルスレーザ測距装置1において、外乱周波数fSTOR=100Hz,…,120Hz毎に、トリガ周波数fTRIGGER が、m=1,2,3,…として、次式の周波数帯域に存在するようにする。 (もっと読む)
(もっと読む)
単一チャンネルヘテロダイン距離測定方法
本発明に拠れば、高精度距離測定は少なくとも2つのパルス繰り返し周波数を伴った電磁放射パルス(ES)の発散により実行され、パルス繰り返し周波数は、対応するパルス分離が最大外部測定レンジの大きさの桁の範囲で公倍数を有さないように選択される。従って前記放射は、装置の外の測定経路を通る測定目標と、装置内部の参照経路(6)との両方に発信され、参照経路を通る放射(IS)は、少なくとも一つのスタートパルスを形成し、測定経路を通る放射(ES)は、少なくとも一つのストップパルスを形成する。目標から後方散乱された放射(RS)と参照経路を通る放射(IS)は、受信され、受信信号に変換され、それから少なくとも一つの目標までの少なくとも一つの距離が決定される。目標から後方散乱された放射(RS)と参照経路(6)を通る放射(IS)は、受信信号が目標から後方散乱された放射(RS)と参照経路を通る放射(IS)からなるコンポーネントを備えるように平行して記録される。  (もっと読む)
(もっと読む)
画像認識装置
【課題】 2つの撮像装置の特性差がある場合でも、比較的簡単なハード構成でかつ少ない演算量で、2つの撮像装置により得られる画像中の対象物を正確に検出することができる画像認識装置を提供する。
【解決手段】 2つの撮像装置により得られる2つの画像全体のコントラスト値を算出し、コントラスト値の大きい方の画像を基準画像とし、他方の画像を比較画像とする(S14)。基準画像中の対象物像を含む基準パターンの輝度値と、比較画像中の、基準パターンと同一形状のパターンの輝度値とを用いて、相関性パラメータ値を算出し、算出した相関性パラメータ値に基づいて対応パターンを抽出する(S17)。
(もっと読む)
距離画像センサ
【課題】測定可能範囲を超える対象物の検出による距離の誤測定を防止し、しかも対象物の反射率が低い場合でも測定可能範囲を比較的遠方まで広げる。
【解決手段】発光源2は対象空間に所定周期の変調信号で変調された光を照射し、光検出素子1は対象空間を撮像する。画像生成部4は、発光源2から対象空間に照射された光と対象空間内の対象物Obで反射され光検出素子1で受光される反射光との変調信号の位相差によって対象物Obまでの距離を求める。また、画像生成部4は、変調信号の周期で規定される測定可能な最大距離までの距離範囲内において対象物Obまでの距離が大きいほど小さくなるように距離に応じて設定された基準閾値と受光光量の代表値とを比較するとともに当該代表値が求めた距離に対する基準閾値より小さいときには求めた距離を距離画像の画素値として採用しないようにしてある。
(もっと読む)
マルチビュー視差表示
【課題】 視差マップを使用して、シーンの奥行き情報を好適に表現する方法を提供する。
【解決手段】 本発明の画像データ処理法は、(a)同じシーンの複数の画像を提供する(20)ステップと、(b)その複数の画像からの少なくとも2対の画像の対のそれぞれに対して、視差マップを生成する(22)ステップと、(c)それぞれの視差マップを共通座標系の中に変換する(24)ステップと、変換された視差マップをマージしてシーンの奥行き情報に関する単一の表現を提供する(25)ステップとを含む。
(もっと読む)
301 - 320 / 331
[ Back to top ]