
Fターム[2F112FA41]の内容
Fターム[2F112FA41]に分類される特許
181 - 200 / 331
立体撮像装置および立体撮像装置の制御方法並びにプログラム
【課題】TOF方式により測距を行うための撮像手段と、ステレオマッチングにより測距を行う撮像手段を備えた立体撮像装置において、被写体への測距光の照射を制限できるようにする。
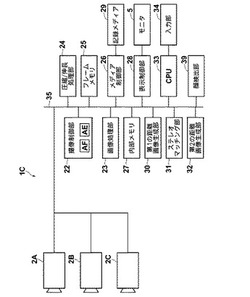
【解決手段】第1の距離画像生成部30において、第1の撮像部2Aが取得した距離画像用のデータから距離画像D1を生成する。第2および第3の撮像部2B,2Cが取得した基準画像および参照画像からステレオマッチング部31が対応点を検出し、第2の距離画像生成部32が距離画像D2を生成する。この際、第1の撮像部2Aによる撮像前に第2および第3の撮像部2B,2Cにより撮像を行い、顔検出部39がこれにより取得した画像から顔等の所定被写体を検出する。所定被写体が検出された場合には、第2および第3の撮像部にのみ撮像を行わせ、第2の距離画像生成部32にのみ距離画像D2を生成させる。
(もっと読む)
固体撮像素子

【課題】 正確な距離画像の計測が可能な固体撮像素子及び距離画像測定装置を提供する。
【解決手段】 固体撮像素子1は、パルス光が入射する固体撮像素子であって、画素P(m,n)へのパルス光の入射光量に応じた電圧(節点Aの電圧)を出力するアンプBAと、アンプBAの後段に接続された第1キャパシタCS1と、アンプBAの後段に接続された第2キャパシタCL1と、第1キャパシタCS1にショートゲート期間の間、アンプBAの出力を入力するための第1スイッチSS1と、第2キャパシタCL1にロングゲート期間、アンプBAの出力を入力するための第2スイッチSL1とを備えている。
(もっと読む)
立体撮像装置および立体撮像装置の制御方法並びにプログラム
【課題】ステレオマッチングによる距離画像を精度良く生成する。
【解決手段】第1の距離画像生成部30において、撮像部2Aが取得した距離画像用のデータから第1の距離画像D1を生成する。撮像部2B,2Cが取得した基準画像および参照画像からステレオマッチング部31が対応点を検出し、第2の距離画像生成部32が第2の距離画像D2を生成する。画素値変更部40が、第1の距離画像D1および第2の距離画像における対応する画素の画素値の差分値を算出し、差分値がしきい値を超える第2の距離画像D2における画素を誤対応画素として検出し、誤対応画素の画素値を所定の画素値に変更する。
(もっと読む)
立体撮像装置および立体撮像装置の制御方法並びにプログラム
【課題】ステレオマッチングを行う際に、対応点の探索のための演算量を低減して、精度良く対応点を求めるようにする。
【解決手段】第1の距離画像生成部30において、撮像部2Aが取得した距離画像用のデータから距離画像D1を生成する。撮像部2B,2Cが取得した基準画像および参照画像からステレオマッチング部31が対応点を検出し、第2の距離画像生成部32が距離画像D2を生成する。この際、距離画像D1上において定められた基準点を基準とした所定の距離範囲内にある領域を、基準画像および参照画像の対応点の探索範囲に設定する。
(もっと読む)
距離計測方法および装置、ならびに距離計測装置を備えた車両
【課題】被検物の反射率および距離に影響されることなく、被検物までの距離情報を正確に計測する。
【解決手段】投光器1R,1Bから照射角に対する照度の変化率が一定の照射光LRと、照射角に応じて照度の変化率が異なる照射光LBとを照射し、被検物の像をカメラ2Cによって撮像し、撮像された画像のうち照射光LRによる画像から、照度の変化率が一定の領域を観察領域として抽出し、照射光LBによる画像から、その観察領域毎に、照度の変化率を求め、この変化率から照射光LBの照射角を求め、この照射角の情報を用いて被検物までの距離を算出する。
(もっと読む)
障害物検出装置、障害物検出システム及び障害物検出方法
【課題】低コントラストの障害物を検出でき、且つノイズとなる不要なエッジ点の検出を防止することができる障害物検出装置を提供する。
【解決手段】遠赤外線撮像装置1R,1Lが撮像して得た画像に基づいて障害物を検出する障害物検出装置3に、撮像して得た画像を構成する各画素の画素値に基づいて各画素のエッジ強度を算出する手段と、複数の所定画像部分毎にエッジ強度の度数分布を算出する手段と、障害物の輪郭に相当する所定数のエッジ点を検出するための閾値を、前記度数分布に基づいて前記所定画像部分毎に選択する閾値選択手段と、前記所定画像部分を構成する画素の画素値及び該所定画像部分で選択された閾値を比較することにより、該閾値以上の画素値を有するエッジ点を検出するエッジ点検出手段とを備え、前記エッジ点検出手段が検出したエッジ点に基づいて障害物を検出する処理を実行する制御部を備える。
(もっと読む)
距離検知システムおよび方法
レーザ距離センサを使用する距離測定システムおよび方法は、種々の応用において有用性を有している。本発明の一観点に従えば、レーザ距離センサは、短いベースラインで正確な距離測定値を獲得することができる。 (もっと読む)
計測装置及びこれを用いた計測方法
【課題】透光性を有する被測定物でも、白色パウダーなどを使用することなく、ニジミが抑えられた鮮明な投影像を得て計測精度を高める。
【解決手段】被測定物に光線を投影する投光手段と、前記光線による投影像を撮像する撮像手段と、前記撮像された投影像における最大輝度及び最大輝度位置を検出する第1検出手段と、前記投影像における前記最大輝度位置から所定距離離間した離間位置を設定する設定手段と、前記離間位置の輝度を検出する第2検出手段と、前記最大輝度と前記離間位置の輝度との輝度差を最大にするための輝度差最大化処理を行う処理手段とを備えた計測装置にする。
(もっと読む)
情報処理システム
【課題】画像間の座標点を高精度に対応付ける。
【解決手段】基準画像3B上で指定される指定点3Pに対応する参照画像3R上の対応点を特定する際に、指定点3Pに対応する位置を通る第1基準方向に沿った線上で探索して第1対応点候補3N1を特定し、第1対応点候補3N1を通り、かつ第1基準方向に略垂直な第2基準方向に沿った線上で探索して第2対応点候補3N2を特定し、さらに第2対応点3N2を通り、かつ第1基準方向に沿った線上で探索して第3対応点3N3を特定する。
(もっと読む)
物体認識装置および物体認識方法
【課題】距離画像を使用して高速かつ高精度に物体の種類や向き、数等を識別することができる物体認識装置を提供すること。
【解決手段】物体認識装置は、レンジファインダ等の対象物の表面の距離画像を取得する手段、設定された単位長情報に基づいて距離画像から離散化距離画像データを生成する手段、離散化距離画像データから立体高次局所自己相関によって特徴データを抽出する手段、予め学習した情報に基づいて多変量解析を行って、特徴データから対象物の種類、姿勢、個数の内の少なくとも1つを判定する手段を備える。対象物の切り出しやマッチング処理を行わずに対象物を認識するので、計算量が少なく、実時間処理が可能である。また、物体の種類と共に個数や姿勢(向き)も判定可能である。
(もっと読む)
ステレオ画像処理装置
【課題】スクリーン等の他の手段を用いることなく、消失点算出の基準となる被写体が存在しない環境においても視差についての視差オフセット値の補正を行うことが可能なステレオ画像処理装置を提供する。
【解決手段】ステレオ画像処理装置1は、視点の異なる複数の画像を撮像するステレオ撮像手段2と、ステレオ撮像手段2により撮像された複数の撮像画像に基づいて被写体の視差dpを検出する視差検出手段7と、視差検出手段7により検出された視差dpおよび視差オフセット値DPに基づいて物体を検出する物体検出手段11と、物体検出手段11により検出された物体のうち実空間における大きさが時間的に変化しない物体に対応する視差dpおよび物体の見掛けの大きさbの変化に基づいて視差オフセット値DPを補正する視差オフセット値補正手段12と、を備える。
(もっと読む)
画像処理を用いた物体検出装置
【課題】路面の傾きや車両の走行によるカメラのロール運動で路面が傾いた撮影画像であっても確実に物体を検出する。
【解決手段】物体検出装置は、地面に対して平行に横に並べた2台のカメラによる各画像から視差画像を生成する視差画像生成部と、視差画像を、2台のカメラを地面に接するよう仮想的に設置した視点からの仮想視差画像に変換する視差画像変換部と、仮想視差画像をU−V平面に投影した画像中のステレオ視差を表す値の密度がしきい値よりも高い部分を直線で近似し、当該直線の傾きからカメラの地面に対するロール角を算出し、当該ロール角を利用して視差画像を補正する補正情報算出部と、補正された視差画像をV−d平面に投影した画像から、補正された視差画像内の路面を直線として推定する路面推定部と、補正された視差画像内の各画素のステレオ視差に基づいて、補正された視差画像内の路面に接し、かつ路面より上に存在する物体を検出する物体検出部とを備える。
(もっと読む)
画像のステレオ・マッチングのためのシステム及び方法
前処理ステップとして動的プログラミングを用いる大域的最適化関数(例えば、確率伝播関数)を用いる少なくとも2つの画像(例えば、立体画像対)のステレオ・マッチングのためのシステム及び方法が提供される。本開示のシステム及び方法は、シーンから第1及び第2の画像を取得し(402)、第1画像内の少なくとも1つの点と第2画像内の少なくとも1つの対応する点との視差を推定し(404,406)、この推定した視差を確率伝播関数(例えば、大域的最適化関数)により最小化する(410)ことを提供する。確率伝播関数は、その確率伝播関数を高速化するよう、第1及び第2の画像に適用される決定論的マッチング関数(例えば、動的プログラミング)の結果により初期化される。システム及び方法は、更に、推定した視差から視差マップを生成し、それを奥行きマップに変換する。 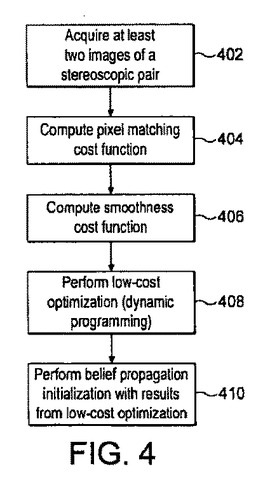 (もっと読む)
(もっと読む)
距離画像生成方法、距離画像生成装置及びプログラム
【課題】ステレオカメラによる視差算出における処理速度と距離分解能という相反する精度の両立を実現可能な距離画像生成方法、距離画像生成装置及びプログラムを提供する。
【解決手段】この距離画像生成方法は、ステレオ画像を取得して視差算出を行うものであって、遠距離領域に対して距離分解能が高い第1演算処理法を用い、中距離領域に対して第1演算処理法よりも距離分解能が低くかつ処理速度が速い第2演算処理法を用い、近距離領域に対して第2演算処理法よりも距離分解能が低くかつ処理速度が速い第3演算処理法を用いる。
(もっと読む)
距離計測装置及び距離計測方法
【課題】計測範囲が広くなり、かつ計測精度が良好となる距離計測装置及び距離計測方法を提供する。
【解決手段】距離演算部26は、受光装置20で受光された反射光に基づいて、床面上の任意の点までの距離を演算する。姿勢検出部28は、距離演算部26により演算された任意の点までの距離に基づいて、姿勢角θを検出する。光源制御部24は、検出された姿勢角θと、演算された任意の点までの距離とに基づいて、任意の点の照射強度が任意の点までの距離の関数により得られた照射強度となるように、光源18から照射される光の強度を制御する。
(もっと読む)
距離検出装置の光学ずれ検出方法及び距離検出装置
【課題】距離検出装置において走行距離センサ等の別の距離測定手段を必要とせずに車両が停止中でも簡易にずれ検出が可能なずれ検出方法及び距離検出装置を提供する。
【解決手段】この距離検出装置のずれ検出方法は、光学系と撮像素子とから構成される複数のカメラで得たステレオ画像に基づいて距離を検出する距離検出装置におけるずれを検出するとき、光学系を介して撮像素子に撮像された既知物体像から既知物体までの第1距離値を求め、第1距離値と、ステレオ画像から検出した既知物体までの第2距離値と、を比較することで距離検出装置におけるずれを検出する。
(もっと読む)
3次元形状復元処理装置及び方法並びにそのプログラム
【課題】本発明は、死角領域をできるだけ少なくした対象物体全体の3次元形状データを得ることができる3次元形状復元処理装置及び方法並びにプログラムを提供することを目的とするものである。
【解決手段】対象物体Sに対して反射ミラー24及び25を介して撮像素子Dにより撮影を行う。反射ミラー25を光軸Aを中心とする円周C上に周回移動させて異なる角度位置から撮影を行い、各角度位置において焦点距離を変化させて撮影した複数の撮影画像の合焦領域に基づいて各角度位置の立体形状データを生成する。そして、立体形状データの死角領域を除去する編集処理を行った後、編集形状データを共通座標系に変換処理して統合することで死角領域の少ない3次元形状データを復元することができる。
(もっと読む)
個体検出器
【課題】検出領域の環境変化に起因した対象物の検出の信頼度の低下を回避でき、検出領域の環境変化に応じて閾値を手動で設定し直す手間がかからない個体検出器を提供する。
【解決手段】個体検出器1は、距離画像センサ2から得られる距離画像P1と背景距離画像P2との差分である差分距離画像P3を生成し、差分距離画像P3において距離値の絶対値が閾値th1,th2以上になる領域を対象物として検出する対象検出手段3と、対象検出手段3で用いられる閾値th1,th2を設定する閾値設定手段5とを備える。閾値設定手段5は、距離画像センサ2からそれぞれ異なるタイミングで距離画像P1を複数取得し当該複数の距離画像P1のうち背景物の同一画素について距離値のばらつきの程度を示す標準偏差を指標値として算出する算出部51と、閾値th1,th2を指標値に所定のマージンを加えた値に自動で設定する設定部52とを有する。
(もっと読む)
レーザ監視装置
【課題】監視対象領域の状況変化に応じて長期に亘って安定に所要とする監視性能を維持することのできる簡易な構成のレーザ監視装置を提供する。
【解決手段】監視対象領域の全域に亘ってパルスレーザ光を走査しながら所定の周期で照射し、この走査に同期して前記監視対象領域における前記パルスレーザ光の反射光を受光して前記監対象領域における物体の有無を監視するレーザ監視装置において、前記監視対象領域における物体検出状況に応じて前記パルスレーザ光の出力周期Tを可変設定する出力周期調整手段を備える。
(もっと読む)
距離画像生成装置
【課題】異常な距離値を持つ画素を含まない距離画像を、より少ない処理量で生成することができる距離画像生成装置を提供する。
【解決手段】撮像素子を用いて、画素値が距離値である距離画像を生成する距離画像生成部と、前記距離画像生成部により複数の異なる時間に生成された距離画像に基づいて所定演算を行い、画素値が速度値である速度画像を生成する速度画像生成部と、前記速度画像生成部により生成された速度画像の画素のうち予め定められた速度範囲外の速度値の画素に対応する距離画像中の画素の距離値が異常値であると判断する異常距離画素判断部と、を備えたこと特徴とする。
(もっと読む)
181 - 200 / 331
[ Back to top ]