
Fターム[2F112GA01]の内容
Fターム[2F112GA01]に分類される特許
61 - 80 / 764
レーザレーダ装置
【課題】装置の周囲において三次元的に物体を認識し得るレーザレーダ装置において、レーザ光の走査をより高速に行い得る構成を、小型化、軽量化を図りつつ実現する。
【解決手段】レーザレーダ装置1に設けられた偏向部41には、水平面に対する勾配状態がそれぞれ異なるように構成された複数の反射面101〜104が中心軸42aを中心として多重に且つ多段に配されている。更に、偏向面41aに対してライン走査がなされるようにミラー31が制御され、この偏向面41a上におけるレーザ光L1のライン走査位置は、偏向部41の回転に応じて複数の反射面101〜104上を相対的に移動する。そして、この相対移動の過程において、ライン走査されるレーザ光L1が複数の反射面101〜104にそれぞれ入射し、各反射面からは水平面に対する角度がそれぞれ異なるようにレーザ光L1が反射するようになっている。
(もっと読む)
レーザレーダ装置

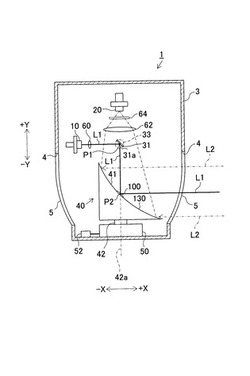
【課題】レーザ光の照射経路上のカバーで生じる内部反射光(外乱光)が受光センサに入り込むことをより確実に抑制することができ、外乱光に起因する誤検出を効果的に防止し得る構成を提供する。
【解決手段】レーザレーダ装置1では、受光面20aの前方側且つ下側寄りの位置を部分的に覆う構成で遮蔽部材70が配置されている。この遮蔽部材70には、受光面覆い部77と、上下に並ぶ複数の凸状部71とを備えており、いずれの凸状部71も、中心軸42aを通り且つ受光面20aの中心位置を通る切断面において外形が三角形状となっており、隣接する凸状部間には窪み79が形成されている。そして、窪み79の上側に配置される凸状部下方面は、レーザ光L1が凹面鏡41から前方側に照射されるときに、当該レーザ光L1の一部が透過板80で反射して生じる鏡面反射成分又はガウス拡散成分を窪み79の内壁に向けて反射するようになっている。
(もっと読む)
レーザレーダ装置
【課題】三次元走査可能なレーザレーダ装置において、水平方向に近い方向にレーザ光を走査する場合に水平方向から外れた方向からの外乱光の影響を効果的に抑制し得る構成を提供する。
【解決手段】レーザレーダ装置1には、フォトダイオード20(受光手段)で受光可能となる視野範囲を変更可能な視野範囲変更手段が設けられている。この視野範囲変更手段は、集光レンズ62からフォトダイオード20までの経路長さを調整すること視野範囲を変更しており、偏向部41からのレーザ光L1の方向が第1方向(水平方向とのなす角度が相対的に大きくなる方向)に設定されている場合には、視野範囲を相対的に広い第1範囲に設定し、レーザ光L1の方向が第2方向(水平方向とのなす角度が相対的に小さくなる方向)に設定されている場合には、視野範囲を第1範囲よりも狭い第2範囲に設定している。
(もっと読む)
距離測定装置
【課題】偏向素子へレーザ光を導くための光学部品を測定範囲内に配置した場合でも死角を形成することなく、広角な範囲を測定可能な距離測定装置を提供する。
【解決手段】レーザ光を用いて測定対象との距離を測定する距離測定装置であって、
レーザ光を出力するレーザ出力部1と、第1の方向に偏光したレーザ光を第1の方向と異なる第2の方向に偏光するとともに測定対象へ向けて偏向する偏向部3と、測定対象の測定範囲内に配置され、第1の方向に偏光したレーザ光を反射して偏向部3へ導き、且つ第2の方向に偏光したレーザ光を透過可能な第1の反射型偏光板2と、第1の反射型偏光板2を保持し、且つ第2の方向に偏光したレーザ光を透過する透明保持体6とを備える。
(もっと読む)
距離測定装置
【課題】測定対象物までの距離に拘らず、光検出器のダイナミックレンジの範囲で、測定対象物までの距離を精度よく測定することができる距離測定装置を提供する。
【解決手段】距離測定装置は、測定対象物に対し測定光を投光する光投光部と、等速で回転移動して対象物で反射された反射光を複数方向に反射可能に構成された可動鏡と、可動鏡で反射された反射光を集光する集光素子と、集光素子の焦点面に配置された予め定めた面積の受光領域を備え、受光領域で受光された光を検出する光検出部と、測定範囲の上限距離に在る対象物からの反射光を受光した場合には受光領域への結合効率が最大となる位置に可動鏡を移動させ、測定範囲の下限距離に在る対象物からの反射光を受光した場合には受光領域への結合効率が小さくなる位置に可動鏡を移動させる駆動制御部と、計測時間から測定対象物までの距離を演算する演算部と、を備える。
(もっと読む)
カメラ校正方法
【課題】ステレオ法を用いた三次元測定に適したカメラ校正を行い、三次元位置の測定における測定精度を向上させることができるカメラ校正方法を提供すること。
【解決手段】複数の特徴点が設けられ、各特徴点の相対位置が既知である校正器を撮像する(S2)。撮像した校正器の画像情報から校正器の特徴点を抽出する(S3)。2つのカメラそれぞれのカメラパラメータの初期値を算出する(S4)。算出したカメラパラメータを用いて、2つ以上の特徴点の三次元位置座標を算出する(S5)。三次元位置座標を算出した各特徴点のうち、2つの特徴点間の距離を算出する(S6)。算出した距離と実際の距離との誤差を算出する(S7)。算出した誤差を用いてカメラパラメータの修正量を算出する(S8)。算出した修正量の分、カメラパラメータを修正して更新する(S9)。
(もっと読む)
ステレオカメラ装置、画像補整方法
【課題】行毎の撮影時刻が異なる撮像素子を利用したステレオカメラにおいて、光軸ずれによる画像の位置ずれだけでなく、動体歪みも補正することが可能なステレオカメラ装置を提供すること。
【解決手段】2つの画像の相関度から被写体との距離情報を検出するステレオカメラ装置100であって、行と列に配列された画素のうち行毎の撮影時刻が異なる撮像素子C0,C1が2つ配置された画像撮影手段200と、2つの撮像素子の相対的な位置ずれ量を検出する位置ずれ検出手段12と、前記位置ずれ検出手段が検出した垂直方向の前記位置ずれ量に応じて、2つの前記撮像素子の一方の撮影開始時刻を変更する開始時刻変更手段13と、2つの前記撮像素子が撮影した2つの画像の一方を、垂直方向の前記位置ずれ量と同程度、垂直方向に平行移動させる補正手段11と、を有することを特徴とする。
(もっと読む)
測位装置、歩幅データ補正方法およびプログラム
【課題】 この発明は、移動量の計測にGPSを利用することなくユーザの歩幅を求めて歩幅データを補正することのできる測位装置、その歩幅データ補正方法およびプログラムを提供する。
【解決手段】 被写体の撮影を行う撮影手段と、加速度を検出する加速度センサと、方位を計測する方位センサと、歩幅データを記憶する歩幅データ記憶手段と、直線状の移動経路上の複数の地点(X1,X2)でそれぞれ行われた撮影の情報に基づき複数の地点(X1,X2)間の距離を算出する距離算出手段と、この距離とこの移動中に計数された歩数に基づいて歩幅データを補正する歩幅補正手段とを備えている。
(もっと読む)
ステレオカメラ
【課題】撮影画像から検出することが困難なカメラ光軸の傾きのずれを抑えることで、経時変化が距離測定精度に及ぼす影響を低減できるステレオカメラを提供する。
【解決手段】第1の単眼カメラ100と第2の単眼カメラ110とを一体に並設したステレオカメラであって、第1の単眼カメラ100および第2の単眼カメラ110は、光軸に直交する基準面100a,110aを有し、第1の単眼カメラ100および第2の単眼カメラ110の基準面100a,110aに当接させるとともに、この2つのカメラの光軸が同一直線上になる位置に並設させて連結するカメラステイ120と、カメラステイ120に取り付けられた第1の単眼カメラ100と第2の単眼カメラ110からの撮影画像を補正する画像補正手段(不図示)と、画像補正手段で補正された補正画像から視差を求め、被写体の距離を算出する距離算出手段と(不図示)、を備える。
(もっと読む)
電子カメラ、画像表示装置、プログラム及び記録媒体
【課題】 本発明は、装置が大型化せず、簡単な構成でサイズ情報を容易に取得し、そのサイズ情報を記録用画像に関連付ける手段を提供する。
【解決手段】 電子カメラは、撮像部と、認識部と、選択部と、第1算出部と、第2算出部と、記録処理部とを備える。撮像部は、撮影光学系を介して被写体の像を撮像する。認識部は、撮像部が生成する第1画像から主要被写体を認識する。選択部は、主要被写体に応じた複数の測定点を選択する。第1算出部は、選択部が選択した測定点ごとに、各々の測定点に対し距離を算出する。第2算出部は、第1算出部が算出した各々の距離に応じて主要被写体の大きさを示すサイズ情報を算出する。記録処理部は、撮像部が生成する記録用の第2画像とサイズ情報とを関連付けてメモリに記録する。
(もっと読む)
距離測定装置及びカメラ
【課題】距離を正確かつ安全に測定することができる距離測定装置及びカメラを提供する。
【解決手段】オートフォーカス機能によって取得された画像データの画像処理を行って顔を検出し、顔以外の部分にレーザ光を照射して人Mまでの距離を測定する。正確な距離情報が得られたフォーカスエリアFAと他のフォーカスエリアFAとの差分からすべてのフォーカスエリアFAにある物体までの距離を算出し、ファインダ枠50内の全部の物体までの距離情報を取得する。
(もっと読む)
ステレオ画像処理装置及びステレオ画像処理方法
【課題】テクスチャの弱い領域を有する画像であっても、画像の対応付けに際しミスマッチングを軽減して高精度の視差検出を行うことができるステレオ画像処理装置、方法を提供する。
【解決手段】第一の画像と第二の画像が入力されると、第一の画像の第一の画素データを相互に異なる位置に含む複数の第一のウィンドウの各々について、当該第一ウィンドウと、指定された視差データに対応した前記第二の画像の第二のウィンドウとの間の非類似性に応じた評価値であるウィンドウコストを生成する。次に、第一のウィンドウのウィンドウコストに、第一の画素データに隣接する三以上の画素データのウィンドウコストを累積加算した累積加算コストを集計した修正コストを計算し、計算した修正コストに基づいて第一の画像の画素データそれぞれの対応点を第二の画像において求め、視差データを出力する。
(もっと読む)
3次元形状測定装置
【課題】チャープ光の長さに依存することなく、奥行きの計測範囲を長くすることができる3次元形状測定装置を提供する。
【解決手段】3次元形状測定装置10は、波長が規則的に経時変化するチャープ光を生成して被測定物Wに対して照射するチャープ機器16と、被測定物Wを反射した反射チャープ光を所定タイミングで所定期間切り出す複数のシャッタ部22a、22b、22cと、複数のシャッタ部22a、22b、22cにより切り出された反射チャープ光と前記複数のシャッタ部22a、22b、22cの位置情報とを用いて、被測定物Wの複数領域の3次元情報を取得する3次元情報取得部26とを備え、複数のシャッタ部22a、22b、22cは、被測定物Wの基準位置に対して距離が異なるように設けられている。
(もっと読む)
距離測定器及びその製造方法
【課題】低コストで製造され、小型で、検出する光量の損失が少なく、高精度に測定を行うことができる距離測定器を提供する。
【解決手段】光源1は、ホルダ81に固定され、レーザ光Lを射出する。有孔ミラー2は、光源1から射出されるレーザ光1の光軸に対して傾斜し、光源1からレーザ光Lを照射される照射領域Aが、光軸方向から見てレーザ光Lのファーフィールドパターンとなるように、ホルダ81に対して空間的に固定されたホルダ82に固定され、照射領域Aに、レーザ光Lに対して光学的に阻害がない透過部20を有する。走査部3は、透過部20を透過したレーザ光Lを、被測定物7に向けて反射させる。検出部5は、被測定物7において反射し、有孔ミラー2において反射したレーザ光Lを検出する。処理部6は、光源1及び検出部5の駆動を制御し、検出部5の出力に基づいて被測定物7までの距離を算出する。
(もっと読む)
光波距離測定装置
【課題】視準方向の変更を招くことなく所望の位置の測定を可能とする光波距離測定装置を提供する。
【解決手段】光源(31)からの出射光(Es)を目標物へ向けて出射するとともに入射した目標物からの反射光(Rs)を受光部(60)で受光し、出射光と反射光とに基づいて距離測定を行う光波距離測定装置10である。光源から目標物への照射光軸Liに至る光路には、光源の出射光軸Leに対して出射光の方向を傾斜させるべく反射させる偏向反射機構(34)が設けられ、偏向反射機構は、光源から見て偏向反射機構よりも目標物側の出射光軸上もしくは照射光軸Li上の所定位置(E)と光学的に共役の関係とされている。
(もっと読む)
空間計測システム及び計測方法、並びに昇降機制御システム
【課題】レーザセンサを用いて監視領域を計測して人や荷物(物体という)の存在状況を監視することで、監視領域へ物体が進入することができるかを判断する。
【解決手段】監視領域にレーザセンサにてレーザ光を照射して監視領域から測距データを得るレーザ監視装置と、特定する物体の三次元のサイズを大きさ毎に複数に区分して予め登録しておく物体認識データベースと、レーザ監視装置によって得られた監視領域の測距データについて、監視領域の背景データとの差分を取って、物体の三次元のデータを算出する検知部と、検知部で算出された物体データと、物体認識DBに登録された物体のサイズとを照合する判断部とを有し、判断部は、照合の結果、検知された物体の大きさが、物体認識DBに登録された特定物体サイズを超えていると判断した場合、その旨を示す情報を出力する。
(もっと読む)
光学情報読み取り装置
【課題】読み取り速度を向上させることができる光学情報読み取り装置を提供する。
【解決手段】光学情報読み取り装置から撮像対象物の複数の点までの距離を測定し(ステップS1)、測定した距離に基づいて、受光センサが撮像した画像を複数の領域に分割する(ステップS2)。そして、分割した領域から読み取り領域を絞り込む(ステップS3)。距離により画像を複数の領域に分割することから、輝度変化やエッジに基づいて領域を分割する場合と異なり、QRコード(登録商標)に起因する輝度変化以外の種々の輝度変化が撮像対象物にあってもその影響を受けない。よって、QRコードを含む領域に精度よく絞り込むことができ、その後の読み取り処理をやり直す場合が低下するので、読み取り速度が向上する。また、領域の絞り込みの精度が向上することから、情報の読み取り精度も向上する。
(もっと読む)
画像処理装置および方法、並びにプログラム
【課題】ディスパリティ画像を生成するためのステレオ画像を撮像するカメラの光軸のずれを補正する。
【解決手段】カメラ21−1,21−2は、異なる視点から、同一の被写体を撮像する。画像ずれ補正部22は、撮像された複数の画像を、ずれ調整部24の調整パラメータ保存部82に保存されている調整パラメータに基づいて変形し、それぞれ補正画像を生成する。マッチング部23は、ステレオマッチング処理によりディスパリティ画像を生成すると共に、複数の補正画像間の視差方向の対応付けが不能な程度を示すエラー量の全画面の積分値をマッチング評価値として算出する。ずれ調整部24は、調整パラメータのうち、視差方向の対応付けに必要とされるパラメータを変化させて、マッチング評価値が最小となるように調整パラメータを更新して、調整パラメータ保存部82に保存する。本発明は、ディスパリティ画像生成装置に適用することができる。
(もっと読む)
光学走査プローブ
【課題】対象物を光ストライプで照射し、対象物表面から反射した光を検出することで、対象物の表面上の複数の点からデータを捕捉するための走査プローブを提供する。
【解決手段】走査プローブは、(a)光ストライプを生成および発するためのストライプ生成手段14、(b)対象物表面から反射した光ストライプを検出するための画素の配列を有する画像センサを備えるカメラ16、(c)カメラ16によって検出された強度に応じて、フレームの取得中に光ストライプの強度を調節するための手段を備える。ストライプ長を修正する手段、処理手段のための隔離された区分室、およびスキャナのための取り付け可能なダストカバーを有するスキャナにも関する。
(もっと読む)
車両用画像認識装置
【課題】測距対象までの測距結果の精度を高めることが可能な補正機能を備えている、車両用画像認識装置を提供すること。
【解決手段】車両周辺の画像を出力する撮像手段(単眼カメラ11)と、測距対象の前記画像上の縦方向位置を前記画像から実測することによって、前記測距対象までの距離を計測する計測手段(立体物抽出部15,距離補正部16)とを備え、前記計測手段は、前記測距対象までの距離を計測する方法とは別の方法で距離が測定された道路標示の前記画像上の縦方向位置によって、前記測距対象までの距離の補正をする、車両用画像認識装置。
(もっと読む)
61 - 80 / 764
[ Back to top ]