
Fターム[2F112GA01]の内容
Fターム[2F112GA01]に分類される特許
141 - 160 / 764
信号処理装置、及び走査式測距装置
【課題】走査式測距装置と被測定物との間に障害物が存在する場合であっても、被測定物に対する距離を正確に算出可能な走査式測距装置を提供する。
【解決手段】
走査部で周期的に偏向走査されたパルス状の測定光に対応して、受光部で検出された被測定物からの反射光に対応する反射信号を微分する微分処理部と、一次微分された一次微分反射信号の立上り時期を基準に当該一次微分反射信号の重心位置を算出し、当該重心位置に対応する時期を反射光の検出時期として求め、測定光の出力時期と当該反射光の検出時期との時間差に基づいて被測定物までの距離を算出して出力する演算部と、微分処理部により反射信号が一次微分された一次微分反射信号の立上り及び立下り特性と、反射信号が二次微分された二次微分反射信号の立上り特性に基づいて、反射光が複数の被測定物からの反射光が重畳した反射光であるか否かを判定する波形判定部を備えている。
(もっと読む)
変位センサ

【課題】安定的なフィードバック制御が可能な変位センサを提供する。
【解決手段】制御部は、複数の画素の第2の方向Yに沿った複数の走査線T毎に受光信号を読み取り、該受光信号に基づいて得られる受光波形のピークに基づく光量レベル(ピーク値又は飽和画素の個数)を走査線T毎に検出し、複数設定された光量レベルの所定の範囲毎の走査線Tの個数をカウントし、その個数が最も多い光量レベルの範囲に基づいてフィードバック制御を行う。
(もっと読む)
撮像装置及び距離取得システム
【課題】測距精度を向上させることが可能な撮像装置を提供する。
【解決手段】この撮像装置50は、被写体(図示せず)に対向する位置に配設され、複数のレンズ1a、1bをアレイ状に配列したレンズアレイ1と、レンズアレイ1の像面側に設けられ、複数のレンズにより結像された被写体の縮小像(以下、個眼像と呼ぶ)の集合である複眼像を撮像するCMOSセンサ(撮像素子)4と、CMOSセンサ4により撮像された複眼像を処理する演算器10と、レンズアレイ1を構成する隣接する各レンズ間での光線のクロストークを防止する遮光壁2と、を備えて構成されている。
(もっと読む)
飛翔体用距離測定装置及び飛翔体位置測定装置
【課題】 鳥類等の飛翔体までの距離及び位置を簡易に測定する。
【解決手段】 望遠レンズ20,21が装着された2台のカメラ10,11を支持台30上に所定距離離間して支持し、好ましくは操作しやすいように0.5〜2mの範囲で離間して支持し、2台のカメラ10,11を同期して水平方向及び鉛直方向に回転動作させることができる構成である。2台のカメラ10,11を備え、常に同期して操作できるため、2台のカメラ10,11の光軸間距離、焦点距離、及び視差を用いて飛翔体までの離間距離を容易に求めることができる。
(もっと読む)
撮像装置及び距離測定装置
【課題】低コストでmm単位の超近距離から100m超の遠方測距までの距離測定を高精度に実現することができ、距離測定を効率的に行える撮像装置を実現する。
【解決手段】本発明の撮像装置10は、同一平面上に配置された複数のレンズを有するレンズアレイ2−1〜2−4を利用して構成した複眼カメラ1−1〜1−4を複数台、1台の筐体5に搭載し、それら複数台の複眼カメラ1−1〜1−4によって撮像された画像を利用して測距することができることを特徴とする。すなわち本発明の撮像装置10では、同一平面上に配置された複数のレンズを有するレンズアレイを利用して1台のセンサでmm単位を測距することができる複眼カメラを用い、この複眼カメラを一定の距離を置いて複数台、1つの筺体内に設置することでm単位の測距を実現するステレオカメラを構成することにより、超近傍から遠方までを1台の撮像装置10で測距することができる。
(もっと読む)
3次元距離計測装置及びその方法
【課題】曲面のエッジ部分等における形状計測精度の向上を図り正確なギャップ計測を行う3次元距離計測装置及びその方法を提供する提供する。
【解決手段】画像を撮影する複数の撮像装置と、計測対象物が所定範囲で重なるように撮像装置を回転させて光軸を調整する回転駆動装置とを備えた3次元撮影手段と、複数の画像に写された所要計測点の画素の位置対応付け情報を演算する対応付け演算処理手段と、位置対応付け情報と回転駆動装置の回転情報とを用いて計測対象物の3次元形状を演算する3次元形状演算処理手段と、3次元形状から計測対象物の3次元形状が得られない領域の3次元形状を推定する3次元形状推定演算処理手段と、推定結果より計測対象物上において指定された2点の距離計測点の3次元座標を演算する3次元計測座標演算処理手段と、これらの3次元座標を用いて2点間の距離を演算する距離演算処理手段とを備えた。
(もっと読む)
距離測定装置
【課題】アイセーフ波長のレーザ光を用いて低コストかつ高精度に距離を測定する。
【解決手段】レーザ光源24からのアイセーフ波長のレーザ光は、ポリゴンミラー21により走査されつつ測定対象に照射される。測定対象からの光はGLV32へと導かれ、GLV32からの回折光が光検出器35にて受光される。光検出器35は単一のフォトダイオードを備える。GLV32からは可干渉性の強い光のみが光検出器35へと導かれるため、レーザ光に由来する光のみが光検出器35にて検出される。GLV32において回折光を出射する領域を移動することにより、レーザ光に由来する光の入射位置が求められる。これにより、背景光の影響を受けることなく精度よく距離を測定することができる。また、単一のフォトダイオードを用いることにより、アイセーフ波長の光を低コストにて検出することができる。
(もっと読む)
対応点探索装置
【課題】処理コストを増大させなくても精度良く対応点を探索し、かつ、大きな処理対象外の領域が発生することを防止する。
【解決手段】信頼度算出部50は、探索部30により探索された各対応点の探索結果を基に、各対応点の探索精度を示す信頼度を算出する。変更部60は、信頼度が所定の値よりも低い対応点を、参照画像上の別の点に変更する。決定部70は、探索部30により探索された対応点、又は変更部60により変更された対応点を基に、注目上階層の参照画像における初期探索点を決定する。探索制御部40は、決定部70により決定された初期探索点を基準として、注目階層の1つ上の階層の参照画像における探索範囲を設定し、探索範囲内において探索部30に探索処理を実行させ、当該探索処理が下位の階層から上位の階層に向けて実行されるように探索部30を制御する。
(もっと読む)
物体検出装置
【課題】 本願は、物体を精度良く検出することができる物体検出装置を提供する。
【解決手段】 本願の物体検出装置10は、2次元走査型の距離計測センサ12と、距離計測センサの出力に基づいて物体を検出する演算装置と、を備えている。距離計測センサ12は、計測対象となる物体36に応じて設定された測定高さH0より低い位置HLに設置されている。また、距離計測センサ12は、距離計測センサ12がセンサ正面を計測するときの距離計測方向θが水平面Pに対して斜め上方を向くように設置されている。
(もっと読む)
物理情報取得装置、固体撮像装置、物理情報取得方法
【課題】別光源から発せられた光に由来する情報を取得する際に、通常光源に起因する外乱ノイズの影響を緩和する。
【解決手段】電磁波エネルギレベルが他の波長よりも低い特定波長と対応した波長の特定波長波を物体に照射し、物体で反射した特定波長波を固体撮像素子314で検知し、得られた検知情報に基づき特定波長波に由来する情報を取得する。特定波長を中心とする狭帯域のバンドパス特性を持つ光学バンドパスフィルタ502を撮像光学経路上に配置する。特定波長波の物体反射光を検知すれば特定波長成分が通常光源の成分に埋もれずに検知される。特定波長波を物体に照射したときとしないときの各検知情報を比較して通常光源に起因する外乱ノイズの影響が緩和された特定波長波に由来する情報を取得する。光学バンドパスフィルタ502を併用すれば、特定波長成分だけを検知でき、通常光源の光量が強い場合でもその影響を受けず、飽和の問題を回避できる。
(もっと読む)
水中距離測定用レーザー送受信システム、レーザースティック及び水中における距離測定方法
【課題】地球上のダイナミックな海底の挙動を測定する水中距離測定用レーザー送受信システムと、レーザースティックと、水中における距離測定方法とを提供する。
【解決手段】少なくとも二以上の送受信装置10を海底に間隔をあけて設置する。一つの送受信装置10が、海水を介して他の送受信装置10に対してレーザー光を照射する送信手段11と、他の送受信装置10から照射されたレーザー光を受信する受信手段12と、送信手段11におけるレーザー光の送信方向、受信手段12におけるレーザー光の受信方向の何れか一方又は双方を制御する制御手段13と、送信手段11、受信手段12の何れか又は双方を用いて他の送受信装置10とレーザー光を送受信して他の送受信装置10との距離を測定する距離測定手段14と、距離測定手段14により収集したデータを格納するデータ格納手段15と、を備える。
(もっと読む)
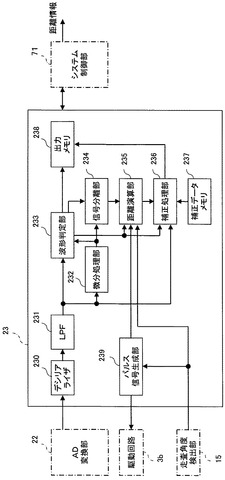
時間計測装置およびセンサ装置
【課題】計測時間の計測精度の低下を抑制し得る時間計測装置およびセンサ装置を提供する。
【解決手段】レーザレーダ装置1に採用される制御回路70の時間計測回路71では、計測時間Tが、デジタル値D1およびデジタル値D2の比率と基準時間Toとに基づいて求められる。さらに、比率演算時の時間分解能Tr1が、比率演算時の演算誤差e1に等しくなるように設定されて、リング遅延パルス発生回路81の遅延素子(ゲートディレイ)の時間分解能よりも細かく設定される。
(もっと読む)
撮像装置、表示方法、および、プログラム
【課題】3Dモデリングのための撮影効率を向上させる。
【解決手段】ファインダ表示処理部213は、第1撮像部110の撮像画像をファインダ画像とするファインダ画面上で指定された領域と、第2撮像部120の撮像画像とでステレオマッチングをおこない、三角測量によって被写体までの最近距離を測距するとともに、被写体までの最遠距離を指定する。ファインダ表示処理部213は、最近距離における有効範囲候補と、最遠距離における有効範囲候補を特定し、各有効範囲候補が重複する範囲を測定可能範囲、各有効候補範囲の差分となる範囲を測定不明範囲として特定する。ファインダ表示処理部213は、測定不明範囲に含まれる画像部分を第2撮像部120の撮像画像で探索し、該当する画像部分が存在する場合、当該部分を測定可能範囲に加え、このような測定可能範囲と測定不明範囲が識別可能なファインダ画面を表示部310に表示する。
(もっと読む)
ステレオカメラ装置
【課題】計測対象物の距離に応じて計測の距離分解能を可変にして、安定かつ高精度に距離測定を行うステレオカメラ装置を提供すること。
【解決手段】ステレオカメラ装置1は、二枚の画像を取り込み、その取り込んだ各画像の一部領域の解像度を変更し、その解像度が変更された各画像の一部領域の視差に基づいて車両から一部領域に写像されている計測対象物までの距離を計算する。これにより、計測対象物が遠距離に存在しかつその大きさが小さい場合でも、安定に距離計測処理を行うことができる。
(もっと読む)
共通画像平面決定プログラム、共通画像平面決定方法、および共通画像平面決定装置
【課題】被写体の立体的処理にかかる精度が十分に確保できる共通画像平面を決定する共通画像平面決定プログラムを提供する。
【解決手段】コンピュータは、第1のステップで、2つのカメラの撮像中心を結ぶ基線軸に平行な回転軸を含む基準共通画像平面を設定する。コンピュータは、第2のステップで、予め設定されている複数の回転角度毎に、第1のステップで設定した基準共通画像平面を、前記回転軸において回転させた判定対象共通画像平面を設定する。コンピュータは、第3のステップで、第2のステップで設定した判定対象共通画像平面毎に、カメラの撮像画像が投影される投影画像領域を検出する。そして、コンピュータは、第4のステップで、第3のステップが検出した投影画像領域の大きさに基づいて、第2のステップで設定した判定対象共通画像平面中から、共通画像平面を選択し決定する。
(もっと読む)
対象物検出装置
【課題】対象物か否かを判断する情報を残しながらも情報量を低減させ、距離画像を用いた対象物の検出における処理負荷を従来よりも低減する。
【解決手段】アクティブ型の距離画像センサ1により距離画像を生成する。背景取得手段2は背景距離画像を記憶し、差分画像生成手段3は、距離画像と背景距離画像とから距離差分画像を生成する。注目画素抽出手段4は、距離差分画像における画素値が存在閾値以上である画素を距離画像から注目画素として抽出し、密度計測手段5では、注目画素を3次元の仮想空間にマッピングし単位体積のブロックごとに注目画素の個数を密度として求める。有効ブロック抽出手段6は、密度が対象閾値以上であるブロックを有効ブロックとして抽出し、領域統合手段7は、隣接する有効ブロックを統合してグループを形成する。対象物判別手段8は、グループのサイズが適正範囲であれば、対象物として判別する。
(もっと読む)
距離取得装置
【課題】ステレオカメラで撮影したステレオ画像から、精度の高い距離測定を行うことができるとともに処理時間の短い距離取得装置を提供する。
【解決手段】ステレオカメラで撮影した複数のステレオ画像ペアを入力する画像入力手段8と、各画像ペアから視差を計算する複数の第一の視差検出手段11、12、13、14と、第一の視差検出手段により検出された視差が所定の範囲の場合に、前記視差検出に使用した画素を含む各画像ペアの一方の画像の領域において画素を補間する複数の画像補間手段と、前記画素補間された領域を使用して視差を計算する複数の第二の視差検出手段と、ステレオ撮像系の基線長に基づいて正規化する正規化手段と、正規化された視差を用いて視差類似評価を行う視差類似評価手段15と、距離検出手段16とを有し、視差評価において、視差検出1の結果と視差検出3の結果の二つだけを利用して視差評価を行う。
(もっと読む)
立体マーカを利用した位置計測システム
【課題】立体マーカの位置計測において、カメラの視線が平行に近い場合であっても奥行き方向の誤差を少なくして位置を計測する。
【解決手段】2台のカメラ(A、B)201で取得した計測対象に配置した複数の立体マーカCMの画像データのうち、一方のカメラ(A)201の画像データが立体マーカCMの1面を認識し、他方のカメラ(B)の画像データが立体マーカCMの2面を認識したものであるとき、前記他方のカメラが認識する2面のそれぞれの中心座標間の中間座標を算出し、算出した中間座標と前記他方のカメラのレンズ中心とを結ぶ視線L3と、前記一方のカメラ(A)201の視線L1との交点P(測定位置)を求める。
(もっと読む)
ステレオカメラの診断方法、およびステレオカメラの診断装置
【課題】この発明は、車載のステレオカメラの位置ずれについて、処理を単純化し、低い計算コストで、一般的な運転環境下で自動的に異常を検知できるステレオカメラの診断方法、およびステレオカメラの診断装置を実現することを目的とする。
【解決手段】この発明は、ステレオ画像を取得するステレオカメラの診断方法において、カメラ画像から特徴物を検出し、光軸中心を基準として実際に検出された特徴物の検出位置と本来検出されるべき位置との垂直方向のずれに基づいてカメラの角度ずれを検出することを特徴とする。
(もっと読む)
光走査装置及びレーザレーダ装置
【課題】小型化、低コスト化を実現できるとともに、受光感度がよくて距離測定精度の高いレーザレーダ装置を提供する。
【解決手段】レーザレーダ装置10は、装置本体を構成するベースフレーム12と、ベースフレーム12の所定位置に固定され、レーザ光を出射する光源14と、光源14からの出射光を図示しない対象物に向けて走査する光走査装置16とを有している。光走査装置16はリコン基板から半導体微細加工法により可動板(反射ミラー)やトーションバー等が一体に形成されており、可動板の中央部にはフォトダイオードが一体に形成されている。対象物からの反射光22は、光学部品を介することなく直接フォトダイオードにより受光される。
(もっと読む)
141 - 160 / 764
[ Back to top ]