
Fターム[2F129BB26]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 相対位置測位 (18,278) | 加速度センサ (2,547)
Fターム[2F129BB26]の下位に属するFターム
X軸(水平面内で進行方向と垂直な方向) (294)
Y軸(進行方向) (322)
Z軸(上下方向) (278)
Fターム[2F129BB26]に分類される特許
1,641 - 1,653 / 1,653
車両の制御装置
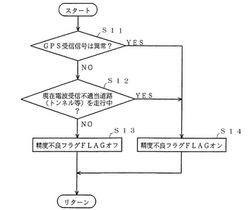
【課題】 走行経路情報の検出精度に対応して車両の挙動をきめ細かく制御することの可能な車両の制御装置を提供する。
【解決手段】 人工衛星からの電波を受信機で受信することにより、車両の走行経路情報を検出する走行経路情報検出装置と、前記走行経路情報に対応して設定された制御パターンに基づいて前記車両の挙動を制御する挙動制御装置とを備えた車両の制御装置において、前記人工衛星からの電波を受信する受信機の受信信号が異常であるか否かを判断するとともに、前記車両が受信機による電波受信に不適当な場所を走行中であるか否かを判断することにより、前記走行経路情報検出装置により検出される走行経路情報の検出精度を検出する精度検出手段(ステップS11〜S14)と、前記走行経路情報の精度に基づいて前記制御パターンを変更する制御パターン変更手段とを備えている。
(もっと読む)
地図表示装置及び地図表示方法

【課題】よりサービス性に富んだ位置情報管理システムを提供する。
【解決手段】携帯端末11は、GPSによる位置測定、携帯電話またはPHSの基地局による位置測定、電波マーカー33による位置測定、及び方向検出器20による自立的位置測定と複数の位置測定手段を有しており、どのような場所でもナビゲーションを行うことが出来るようになっている。携帯端末11からは、同じく携帯端末11を有している第3者の位置をセンターシステム10に問い合わせることにより知ることが出来、徘徊老人や子ども、スキー場でのスキーヤーの行動監視等を行うことができる。携帯端末11には、所持者がよく使う地域の地図データのみがコンパクトに保持されており、この地図データにない地域に行ったときは、センターシステム10から対応する地データをダウンロードして使う。
(もっと読む)
複数のナビゲーションコンポーネントの整合システム及び方法
一例示のナビゲーションシステムが、移動体(105)の第1のロケーションにおけるマスタナビゲーションコンポーネント(110)と、移動体の物理的変形のために第1のロケーションに対して変位が可変である第2のロケーションにおけるスレーブナビゲーションコンポーネント(115)とを使用する。静的ロケーションコンポーネント及び動的ロケーションコンポーネントが、第1のロケーションと第2のロケーションとの間の変位の静的情報及び動的情報を提供する。誤差見積もり器が、マスタナビゲーションコンポーネントによって生成されたナビゲーション測定データと静的ロケーションコンポーネント及び動的ロケーションコンポーネントによって提供された変位情報とに基づいて、スレーブナビゲーションコンポーネントにより生成されたナビゲーション測定データの誤差を推定する。マスタナビゲーションコンポーネントは、求められた誤差に基づいて、スレーブナビゲーションコンポーネントのナビゲーション測定データを補正し、スレーブの補正されたナビゲーション測定データを変換する。一例示のナビゲーションシステムは、移動体の第1のロケーションにおけるマスタナビゲーションコンポーネントと、移動体の物理的変形のために第1のロケーションに対して変位が可変である第2のロケーションにおけるスレーブナビゲーションコンポーネントとを使用する。静的ロケーションコンポーネント及び動的ロケーションコンポーネントは、第1のロケーションと第2のロケーションとの間の変位の静的情報及び動的情報を提供する。誤差見積もり器は、マスタナビゲーションコンポーネントによって生成されたナビゲーション測定データと静的ロケーションコンポーネント及び動的ロケーションコンポーネントによって提供された変位情報とに基づいて、スレーブナビゲーションコンポーネントにより生成されたナビゲーション測定データの誤差を推定する。マスタナビゲーションコンポーネントは、求められた誤差に基づいて、スレーブナビゲーションコンポーネントのナビゲーション測定データを補正し、スレーブナビゲーションコンポーネントの補正されたナビゲーション測定データを、その座標系におけるナビゲーション測定データに変換する。 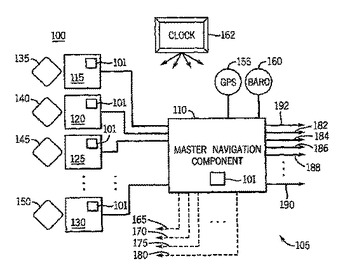 (もっと読む)
(もっと読む)
移動体端末及び加速度情報に基づき位置を決定するための方法
移動体端末が受信した無線通信信号(GPS信号、衛星信号、セルラー信号、ワイド・エリア・ネットワーク信号、無線ローカル・ネットワーク信号等)に基づいて加速度計測回路が校正される。そして、当該移動体端末の位置が、校正された加速度計測回路を利用して決定される。よって、加速度計測回路の校正により、その精度が改善され、結果として位置決定精度も改善される。異なる実施形態では、移動体端末の位置は、(GPS信号などの無線通信信号を用いて推定される)第1の位置と、(第1の位置からの移動体端末の移動距離を計算するために利用される加速度情報に基づいて計算される)第2の位置とを結合することにより決定される。 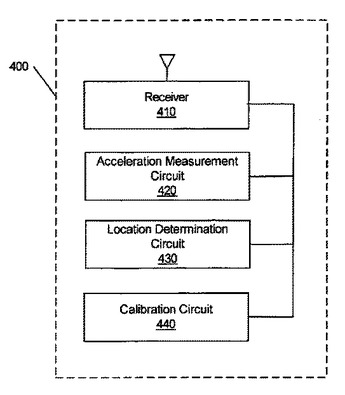 (もっと読む)
(もっと読む)
高度なナビゲーション性能のための方法およびシステム
ナビゲーションのための方法およびシステムが開示される。一実施例においては、地上局の視野内におけるGPS衛星からのデータがイリジウム衛星などのLEO衛星に再伝送され、必要であれば、ユーザに伝送される前に相互リンクされる。次いで、ユーザは、干渉またはジャミングによるエラーを解決するために、GPS衛星から直接受取ったデータとフィードフォワードされたデータを組合せることができる。代替的には、方法は、ユーザ装置において少なくとも1つの搬送波信号を受信するステップを含み、各々の搬送波信号は別個のLEO衛星によって伝送される。ユーザ装置は、第1の搬送波位相情報を得るよう搬送波信号を処理する。ユーザ装置は、慣性基準ユニットにおいて得られる慣性位置決定を再現する。ユーザ装置は、慣性位置決定および第1の搬送波位相情報に基づいてユーザ装置の位置を導き出す。 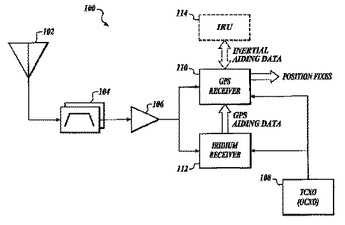 (もっと読む)
(もっと読む)
船舶の制御システムを検査するための方法及びシステム
船舶(4)の制御システム(2)を検証するための方法であって、上記制御システム(2)は、その動作状態において、センサ(8)からのセンサ信号(7)及びコマンド入力装置(10)からのコマンド信号(9)を受信するとともに、応答として、制御信号(13)をアクチュエータ(3)に対して供給することにより、上記船舶(4)の所望の位置、速度、進路又は他の状態を維持する方法において、時間(t0)中に、実際のセンサ信号(実センサ信号)(7a、7b、7c、……)の受信を切り離して、上記実際のセンサ信号を、検査信号源(41)からの人工の測定値(7a’、7b’、7c’、……)の検査シーケンス(T0)と置き換えるステップと、人工のセンサ信号(7、7’)に基づいて上記制御システム(2)を機能させて、上記第1の時間(t0)における上記第1の検査シーケンス(T0)に対する応答(SO)として制御信号ロガー(42)に記録される制御信号(13’)を生成するステップと、検査シーケンス(T0)に対する応答(S0)を上記制御システム(2)の「署名」応答(S0)として記憶するステップとを含み、その後の時間(t1、t2、t3、……)において、制御システム(2)に対して入力される検査シーケンス(T0)を使用して、その後の応答(S1、S2、S3、……)を記録するとともに、上記その後の応答(S1、S2、S3、……)が署名応答(S0)にほぼ類似しているかどうかを決定して、上記制御システム(2)が変更されているか否かを検証するという目的をもっていることを特徴とする方法。  (もっと読む)
(もっと読む)
ナビゲーションシステム、携帯情報端末装置、サーバ、およびナビゲーション方法
本発明のナビゲーションシステムによれば、位置が特定できる文字を携帯電話装置(1)に内蔵された撮像部(12)で撮像することによって、ユーザは煩雑な操作をすることなく、所望の位置が特定可能な被写体を撮像するだけで、推奨経路の目的地や表示画面の位置指定等を行うことができる。また、画面表示が貧弱あるいは表示部を有しないナビゲーション装置(2)においても、携帯電話装置(1)が有する表示部(10)を利用することによって、ユーザが容易に検索結果を確認することができる。 (もっと読む)
距離算出装置および算出プログラム
移動物体と対象物との間の方位角や、速度、ヨーレートなどの各種の状態量に基づいて、移動物体と対象物との間の距離を正確に算出することを目的とする。算出装置1は、移動物体と対象物との間の方位角を算出する手段2と、2つの時点間の移動物体の移動距離を算出する手段3と、移動方向の角度変化量を算出する手段4と、手段2、手段3、手段4の出力を用いて移動物体から対象物までの直線距離を算出する手段5とを備える。 (もっと読む)
自動二輪車用の走行情報蓄積方法および走行情報蓄積システム
【課題】 自動二輪車の走行支援のために適切なバンク角を記憶できる自動二輪車用の走行情報蓄積方法を提供する。
【解決手段】 自動二輪車の走行情報を蓄積する方法であって、自動二輪車の座標データを得る工程(S10)と、自動二輪車の左右バンク角を算出する工程(S20)と、前記座標データと前記左右バンク角とをリンクして記憶する工程(S30)とを包含する、自動二輪車用の走行情報蓄積方法である。
(もっと読む)
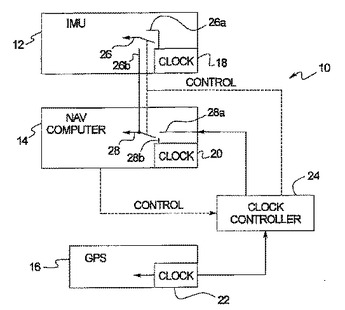
ディープインテグレーション用GPS/IMUクロック同期
航法システムは慣性計測ユニット、航法コンピュータ、GPS受信機、クロックコントローラを備える。慣性計測ユニットは第1のクロックと第1のスイッチを備え、航法コンピュータは第2のクロックと第2のスイッチを備え、GPS受信機は第3のクロックを備える。第1と第2のスイッチはクロックコントローラで制御される。このため、慣性計測ユニット、航法コンピュータ、GPS受信機においてそれぞれ自身のクロックを使用したり、あるいは慣性計測ユニットと航法コンピュータにおいて第2のクロックを使用したり、あるいは慣性計測ユニットと航法コンピュータとGPS受信機において第3のクロックを使用することができる。
 (もっと読む)
(もっと読む)
慣性システム用の入力された位置合わせデータを使用する慣性GPSナビゲーションシステム
慣性(「INS」)/GPS受信機は、それが、始動中に動いているときには、入力された位置合わせデータを使用してINSサブシステムの位置合わせを決定する。位置合わせデータは、パラメータ化された表面情報、測定されたGPS速度、及び、受信機が搭載されている乗物と、慣性測定ユニット(「IMU」)の加速度計及びジャイロスコープに関連する慣性測定基準、または、ボディ、フレームとの間の既知のまたは既定の角度関係から決定される。制約をもたらすパラメータ化された表面情報は、受信機を収容している乗物が移動している表面の配向とすることができる。受信機は、初期のGPS位置を使用して、パラメータ化された表面上、したがって、既知の表面の配向上の乗物の位置を決定する。受信機は、次に、関連するGPS速度ベクトルを使用して、表面上の乗物のロール、ピッチ、及び方位を決定する。その後、受信機は、乗物の計算されたロール、ピッチ、方位、及び、乗物とIMUボディフレームとの間の既知のまたは既定の角度関係を使用して、IMUボディフレームを受信機によって使用される計算上のフレームまたは基準フレームに関連付ける回転行列を決定する。 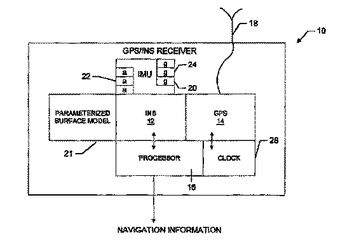 (もっと読む)
(もっと読む)
測定及び記憶された重力傾度を用いて慣性航法測定値の精度を改善する方法及びシステム
【課題】 重力データベースを用いて、非連続的な原子干渉計慣性計測器測定値及び連続的な広帯域幅計測器測定値を処理するシステムを提供する。
【解決手段】 一実施形態は、傾度を有する重力擾乱ベクトルデータベースと、リアルタイム重力グラジオメータ傾度測定値とデータベースからの傾度とを比較して、観測値を与えるコンパレータと、入力において観測値を受信し、モデル化された誤差状態ベクトルを出力するカルマンフィルタとを備え、重力データベースからの重力擾乱ベクトルを用いて、広帯域幅の従来型慣性加速度計の具体的な力測定値から、実際の重力擾乱ベクトルの既知の部分が除去され、それにより航法データが形成される。その方法の一実施形態は、記憶された傾度を有する重力擾乱ベクトルデータベースを設けるステップと、重力傾度のリアルタイム測定値を与えるステップと、記憶された傾度及び重力傾度を処理して、航法用データを形成するステップとを有することができる。
(もっと読む)
移動通信端末機の位置情報を用いたナビゲーションサービス提供方法
本発明による移動通信端末機の位置情報を用いたナビゲーションサービス提供方法は、(1)ユーザの第1端末機の位置情報を検出する段階と、(2)検出された前記第1端末機の位置情報を出発地情報として受け取る段階と、(3)所定の目的地情報を受け取る段階と、(4)前記出発地情報と前記目的地情報に基づいて所定の経路情報を出力する段階と、(5)前記出力された経路情報を前記ユーザの前記第1端末機に提供する段階と、(6)前記ユーザの第2端末機でのGPS信号の受信可否を判断する段階と、(7)GPS信号を受信することができる場合、前記GPS信号を介して出力される前記ユーザの位置情報に基づいて前記経路情報を補正する段階と、(8)前記補正された経路情報を前記第1端末機に提供する段階とを含む。 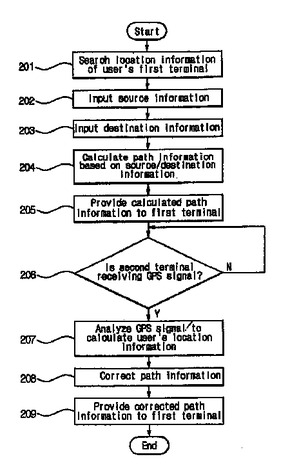 (もっと読む)
(もっと読む)
1,641 - 1,653 / 1,653
[ Back to top ]