
Fターム[2F129BB64]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正タイミング (1,144) | 衛星による測位不良時 (525) | マルチパス (129)
Fターム[2F129BB64]に分類される特許
81 - 100 / 129
絶対位置決めモード及び相対位置決めモードを含む位置決め装置、方法、並びにプログラム
本発明は、絶対位置決めシステム及び相対位置決めシステムを使用して位置を判定するように構成される位置決め装置(PD)に関する。位置決め装置は、絶対位置決めシステム及び場合によっては相対位置決めシステムを使用して位置を判定する第1のモード、並びに相対位置決めシステム及び場合によっては絶対位置決めシステムを使用して位置を判定する第2のモードで動作するように構成される。絶対位置決めシステムは、第2のモードにおいてよりも第1のモードにおいてより重点を置かれ、位置決め装置は、第1のモードから第2のモードに切り替えるように構成される。位置決め装置(PD)はデジタル地図データベース(DMD、3DMD)へのアクセスが可能であり、第1のモードから第2のモードへの切り替えは、地図データベース(DMD、3DMD)に格納された情報と組み合わせて、少なくとも判定された位置に基づいて決定される。 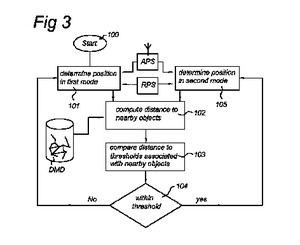 (もっと読む)
(もっと読む)
位置検出装置及び位置検出方法
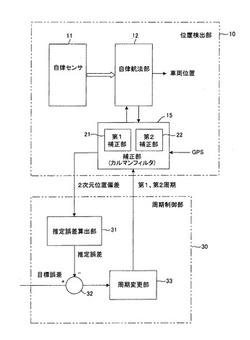
【目的】位置検出精度を維持しつつ、CPUの負荷を軽減する「位置検出装置及び位置検出方法」を提供することである。
【構成】車両の現在位置を検出する位置検出装置において、自律航法部は第1の周期で高速に自律航法に基づいて位置計算し、補正部は、該第1の周期以上の長さの第2の周期で自律航法位置計算に使用する車両速度、ピッチ角、センサー取り付け姿勢角などを補正する第1補正処理を行ない、かつ、GPSの測位周期である第3の周期でGPSデータを用いて自律航法による計算結果を補正する第2補正処理を行う。周期制御部は、補正対象の推定誤差を算出し、該推定誤差と目標誤差の差分に基づいて少なくとも第1、第2周期を制御する。
(もっと読む)
移動体用測位装置及び移動体用測位方法

【課題】マルチパス発生時にも精度良く測位すること。
【解決手段】本発明による移動体用測位装置は、擬似距離算出手段203と、衛星と移動体との間の距離の初期値に、衛星電波の観測値から求まる衛星と移動体の間の距離の変化量(以下、距離変化量という)を積算して、衛星と移動体との間の距離を算出する衛星移動体間距離算出手段212と、前記擬似距離算出手段による第1距離算出モードと前記衛星移動体間距離算出手段による第2距離算出モードとを切り替えるモード切替手段208と、衛星電波の直接波とその反射波とからなる合成波の受信を検出する合成波検出手段206とを備え、前記モード切替手段は、前記合成波検出手段により前記合成波の受信が検出された場合に、前記第1距離算出モードから前記第2距離算出モードに切り替えることを特徴とする。
(もっと読む)
車載ナビゲーション装置、ナビゲーションシステム及びコンピュータプログラム
【課題】GPSを利用して車輌の位置を測位する場合に、電波を直接受信可能なGPS衛星の数が少ない場合にも、高精度で測位を行なえるようにする。
【解決手段】GPS衛星からの直接波による測位結果に基づいて、GPS衛星からの反射波の経路長Ld1+Ld2を直線距離Lに補正する補正量をデータベース化しておく。直接波を受信可能なGPS衛星の数が必要な数に満たない場合に、他のGPS衛星からの反射波をデータベースに基づいて補正することにより、直接波と補正された反射波とによって測位を行なう。
(もっと読む)
ナビゲーション装置及びその制御方法
【課題】電波のマルチパス妨害環境を直接的に高い信頼度で検出して、GPS測位結果の採用を抑制することにより、自車位置精度を効果的に改善すること。
【解決手段】、受信環境情報取得手段25で、FMレシーバ21から、そのマルチパス検出機能で判定した受信環境、すなわちFM受信におけるマルチパス環境下か否かを表す受信環境情報を取得し、このように受信環境情報取得手段25で得た受信環境情報における前記受信環境の良否に基づいて、決定手段27において、GPS測位情報の採否を決定する。
(もっと読む)
GPS受信機を用いた測位装置
【課題】 マルチパスの影響を受けやすいGPS衛星の信号を使用しないようにして測位精度を向上させる。
【解決手段】複数のGPS衛星からのGPS信号は、アンテナ21を介してGPS受信機22に入力される。GPS受信機で特定の座標データを算出し、測位データ取得部23と衛星位置情報取得部24に入力し、取得された測位データと位置情報は演算部25に入力される。演算部25には測位環境データ記憶部26から測位環境データが入力される。測位データ取得部23、衛星位置情報取得部24及び演算部25は、マイクロコンピュータ27から構成される。測位は測位データ取得部23で行い、その結果と、衛星位置情報取得部24で取得した情報及び測位環境データ記憶部26のデータによって演算部25で最適な測位を行い、結果をGPS受信機22に戻し、仰角マスク、DOP値のマスクを適正な値に調整して測位精度を上げる。
(もっと読む)
測位装置、電子機器、測位不適衛星判定方法及びプログラム
【課題】測位に不適な測位用衛星を適切に判定すること。
【解決手段】道路及び道路の区間毎に定められた仰角マスクデータの中から、仮計測等によって判断された仮の現在位置に対応する仰角マスクデータが択一的に選択される。そして、当該現在位置を基準とした各捕捉衛星の天空位置と、選択された仰角マスクデータとに基づいて、測位不適衛星が判定される。
(もっと読む)
GPS受信機および位置検出方法
【課題】コストを増大させることなく、位置検出精度を向上させること。
【解決手段】GPS受信機は、x軸上に並べられたアンテナ素子A0,Axと、x軸に直交するy軸上に並べられたアンテナ素子A0,Ayとを有するアレイアンテナを備え、このアレイアナテナによって受信された衛星信号に基づいて、基準方角に対する衛星信号の到来角度を推定し、推定した到来角度と衛星信号の軌道情報から求められる到来角度との角度差分が基準値未満であるか否かを判定し、角度差分が基準値未満であった場合に、当該衛星信号を用いて位置検出を行う。
(もっと読む)
移動体用測位システム及びこれに用いる装置
【課題】早期に擬似距離のばらつきを収束させること。
【解決手段】第1移動体に設けられ、衛星からの信号の受信結果に基づいて該衛星と該第1移動体との間の擬似距離を算出する第1擬似距離算出手段と、第2移動体に設けられ、前記衛星からの信号の受信結果に基づいて該衛星と該第2移動体との間の擬似距離を算出する第2移動体側擬似距離算出手段と、前記第1移動体及び前記第2移動体のうちの少なくとも一方の移動体に設けられ、前記第1移動体と前記第2移動体との間の距離を算出する手段と、前記算出された衛星と第2移動体との間の擬似距離、及び、前記算出された第1移動体と前記第2移動体との間の距離を用いて、前記第1移動体と衛星との間の擬似距離を算出する第2擬似距離算出手段と、前記第1及び第2擬似距離算出手段によりそれぞれ算出された擬似距離を結合して、1つの結合擬似距離を算出する結合擬似距離算出手段と、該結合擬似距離算出手段により算出された前記結合擬似距離を用いて前記第1移動体の位置を測位する測位演算手段とを備える。
(もっと読む)
GPS測位装置
【課題】 マルチパスによる影響を低減し、測位精度の高い「GPS測位装置」を提供する。
【解決手段】 GPS測位装置は、移動体の高度情報Zoを記憶する高度情報メモリ34と、捕捉可能な複数のGPS衛星の中からGPS衛星の組合せを求める組合せ算出部30と、組合せ毎に移動体の3次元位置を計測する位置計測部32と、計測された3次元位置に含まれる高度情報Zと高度情報メモリ34かた提供される高度情報Zoとの差分を求める差分抽出部36と、抽出された差分としきい値とを比較し、差分がしきい値以下となるGPS衛星の組合せを選択し、選択された組合せの3次元位置に基づき移動体の測位位置を決定する位置決定部38とを有する。
(もっと読む)
移動体位置測位装置
【課題】複数の測位手段を用いて効率的に且つ精度良く移動体位置を測位すること。
【解決手段】本発明による移動体位置測位装置は、衛星からの信号の観測データに基づいて瞬時測位方法により移動体の位置を測位する第1測位手段と、過去の移動体の位置の測位結果と、移動体の速度情報とを用いて、移動体の位置を測位する第2測位手段と、過去の前記第1又は第2測位手段の測位結果から得られる変数解を用いて、移動体の位置を測位する第3測位手段と、前記各測位手段のうち測位処理を実行する測位手段を選択する制御手段60とを備え、前記制御手段は、選択した測位手段の測位結果の信頼性が所定基準値より低い場合に、別の測位手段を選択して測位処理を実行させることを特徴とする。
(もっと読む)
2次元及び3次元の正確な場所及び方位を判定する装置及び方法
a)軌道に沿って移動した際に地上の乗物に搭載された全地球測位システムにより採られた全地球測位システムのサンプルを取得する動作と、b)全地球測位システムのサンプルに基づいて軌道の第1の推定値を取得する動作と、c)軌道に沿って移動した際に地上の乗物に搭載された慣性測定ユニットにより測定された測定値に少なくとも基づいて、軌道の第2の推定値を取得する動作と、d)第1の推定値と第2の推定値とを比較する動作と、e)第2の推定値と比較して所定の閾値を上回る変動を第1の推定値が示す場所を確立する動作と、f)このような場所を確立できない場合に動作j)に続き、確立できる場合に動作g)に続き、g)大きい変動である場所に関連付けられた全地球測位システムのサンプルを不正確な全地球測位システムのサンプルであるとして除去し、それにより、残った全地球測位システムのサンプルの集合を形成する動作と、h)残った全地球測位システムのサンプルに基づいて軌道の第1の推定を再び計算し、第2の推定を再び計算する動作と、i)動作d)から動作h)を繰り返す動作と、j)動作群を終了する動作とに従って、GPSサンプルの集合の中の不正確なGPSサンプルを判定する方法及び装置。 (もっと読む)
測位装置、カーナビゲーション装置及び測位方法
【課題】簡易に正確な受信機の位置を検出することが可能な「測位装置」、「カーナビゲーション装置」及び「測位方法」を提供する。
【解決手段】制御部102は、GPS受信機50によって受信される信号の送信元のGPS衛星を4個ずつ組み合わせた場合における全ての組み合わせ毎に、当該組み合わせに属する4個のGPS衛星からの信号に対応するGPS情報に基づいて、車両位置を検出し、これら組み合わせ毎に検出された車両位置に基づいて、マルチパスが発生しているGPS衛星を特定し、そのGPS衛星以外のGPS衛星からの信号に対応するGPSに基づいて、車両位置を検出する。
(もっと読む)
測位装置、測位装置の制御方法、その制御プログラム及び記録媒体
【課題】高度データを保持する記憶負担を低減し、かつ、前回測位時の不良な測位条件の影響を低減しつつ、2次元測位に使用するための正確な高度情報を取得することができる測位装置等を提供すること。
【解決手段】推定高度H1を示す推定高度情報を格納する推定高度情報格納手段と、SPS(Satellite Positioning System)衛星からの信号である衛星信号を受信する信号受信手段と、推定高度H1を使用して2次元測位を行って、2次元高度H2cを算出する2次元高度算出手段と、2次元測位の際に、予備3次元測位によって3次元高度H2bを算出する3次元高度算出手段と、推定高度情報を更新するために3次元高度H2b又は2次元高度H2cのいずれか一方を選択する高度選択手段と、高度選択手段によって選択した3次元高度H2b又は2次元高度H2cによって、推定高度H1を更新する更新手段と、を有する。
(もっと読む)
ナビゲーション装置及び、その方法、並びにそのプログラム
【課題】従来技術に比較して正確にマルチパス判定処理を行い、高精度で測位計算を行う。
【解決手段】ナビゲーション装置10は、速度ベクトル算出器33と、マルチパス判定楕円算出器23と、位置及び速度算出器22とを備える。マルチパス判定楕円算出器23は、現在位置とナビゲーション装置10の進行方向とに基づいてマルチパス判定楕円を算出する。位置及び速度算出器22は、受信無線信号のGPS衛星からナビゲーション装置までの伝搬距離とマルチパス判定楕円とに基づいて、受信無線信号がマルチパス合成信号であるか否かを判定するマルチパス判定処理を実行し、マルチパス合成信号でないと判定されたGPS衛星からの受信信号に基づいて自車位置を算出する。
(もっと読む)
全視野のコヒーレントなGPS信号擬似ランダム雑音(PRN)コード捕捉及びナビゲーション解決定のための全地球測位システム(GPS)ユーザ受信機および幾何学的表面処理
GPS装置のより強固な検出、捕捉、位置決め解能力を可能にする方法およびシステムである。システムおよび方法はGPSユーザ受信機の位置を予測するために、一度に一つのGPS信号の捕捉ではなく、同時的な全視野のコヒーレントなPRNコード信号処理方式に基づいたGPS衛星距離信号を使用する。さらに、画像処理技術、超密着結合処理技術、またはその組合せはさらにユーザ受信機の位置決定の正確性を強化するために使用される。信号処理技術はGPS衛星距離信号が個別に検出されることができないとき、或いは1または2のみの強いGPS衛星距離信号が弱い信号環境、混雑状態、その組合せにおいて個別に検出されることができるときGPSユーザ受信機の位置を決定するために使用される。 (もっと読む)
ナビゲーション装置及び、その方法、並びにそのプログラム
【課題】マッチング処理及びセンサ補正の各要求精度を満たし、従来技術に比較して高い精度で車両の現在位置を測定する。
【解決手段】ナビゲーション装置10は、信頼性判定器13と、位置計算器16と、速度計算器15と、センサ部2と、マッチング部4とを備える。信頼性判定器13は、複数のGPS衛星からの各受信無線信号が基準レベルVref1よりも高いとき、当該受信無線信号が位置計算に使用可能と判定し、各受信無線信号が基準レベルVref2よりも高いとき、当該受信無線信号が速度計算に使用可能と判定する。位置計算器16は、位置計算に使用可能と判定された受信無線信号を用いて位置を算出し、速度計算器15は、速度計算に使用可能と判定された受信無線信号を用いて速度を算出する。マッチング部4は、所定の地図データと、センサ部2により算出された速度ベクトルと、位置計算器16により算出された位置とに基づいて、現在位置を算出する。
(もっと読む)
測位装置、その制御方法、制御プログラム及びその記録媒体
【課題】非同期の通信システムにおけるRTTを併用して2次元測位を行い、位置誤差の少ない位置を出力することができる測位装置等を提供すること。
【解決手段】SPS衛星からの衛星信号と、SPS衛星との時刻非同期の通信基地局からの通信信号を使用して2次元測位を行う測位装置20であって、衛星信号を受信して算出した擬似距離と前記SPS衛星の軌道情報に基づいて、測位装置の推定位置を示す推定線L2を算出する推定線算出手段と、通信信号が通信基地局と測位装置との間を往復する往復時間を取得する往復時間取得手段と、往復時間と通信基地局40の位置に基づいて、測位装置20の予想位置を示す予想円L3を算出する予想円算出手段と、推定線L2と予想円L3との共有点を算出する共有点算出手段と、共有点に基づいて、測位装置20が出力するための出力位置Pfixを算出する出力位置算出手段と、を有する。
(もっと読む)
通信基地局、その制御方法、その制御プログラム及び記録媒体、及び、測位装置
【課題】通信基地局と通信可能な測位装置に対して、通信基地局におけるコードフェーズを使用することが妥当である条件を満たした場合にのみ、通信基地局におけるコードフェーズを提供することができる通信基地局等を提供すること。
【解決手段】通信基地局40は、測位装置20との間を通信電波が伝播する伝播時間が予め規定した時間許容範囲内か否かを判断する伝播時間評価手段と、各衛星信号のコードフェーズを算出するコードフェーズ算出手段と、通信基地局40が算出したコードフェーズと測位側コードフェーズとの差分を算出する差分算出手段と、差分が、マルチパスの影響を受けている場合の差分範囲であるマルチパス影響範囲内か否かを判断する差分評価手段と、差分評価手段によって、差分がマルチパス影響範囲内であると判断した場合に、通信基地局40が算出したコードフェーズを測位装置20に送信する補正値送信手段等を有する。
(もっと読む)
測位装置、測位装置の制御方法、その制御プログラム及び記録媒体
【課題】地図データを保持したり、通信基地局と通信する必要がないにもかかわらず、迅速にマルチパスを排除して測位を行うことができる等を提供すること。
【解決手段】SPS(Satellite Positioing System)衛星からの衛星信号を受信して現在位置を測位する測位装置20であって、受信した衛星信号に対応するSPS衛星の方位角を算出する方位角算出手段と、複数のSPS衛星の方位角に基づいて、マルチパス環境を含む受信環境を判断する受信環境判断手段と、を有する。
(もっと読む)
81 - 100 / 129
[ Back to top ]