
Fターム[2F129BB64]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正タイミング (1,144) | 衛星による測位不良時 (525) | マルチパス (129)
Fターム[2F129BB64]に分類される特許
61 - 80 / 129
位置特定装置、コンピュータプログラム及び位置特定方法
【課題】歩行者の位置を特定する特定精度の向上を計ることができる位置特定装置、位置特定装置を実現するコンピュータプログラム及び位置特定方法を提供する。
【解決手段】信号機が設置された交差点に関する交差点情報に基づいて歩行者の位置を特定する位置検出装置10であって、交差点情報を受信し、受信した交差点情報に基づいて、交差点の位置を取得する。また、信号機が青信号と赤信号とを切り替える信号切替タイミングを、受信した交差点情報に基づいて取得する。操作部16から操作を受け付けたタイミングが、取得した信号切替タイミングと合致するか否かを判定し、合致する場合、歩行者の位置を、交差点の位置と特定する。
(もっと読む)
測位方法、プログラム、測位装置及び電子機器

【課題】測位装置の移動状態を適切に判定してフィルタ特性を可変することで、測位精度
の向上を図ること。
【解決手段】携帯型電話機1において、速度補正処理で補正された状態ベクトル「X」か
ら求められる携帯型電話機1の速度「V」に含まれる速度誤差「σV」(速度成分の精度
)が、速度予測処理で予測された誤差共分散行列「P」に基づいて決定され、当該速度誤
差「σV」に基づいて、携帯型電話機1の移動状態を判定するための速度閾値(速度条件
)が設定される。そして、速度補正処理で補正された状態ベクトル「X」から求められる
速度「V」と、先に設定された速度閾値とが比較されて携帯型電話機1の測位モード(移
動状態)が判定され、当該測位モードに応じたプロセスノイズ「Q」(フィルタ特性)で
カルマンフィルタ処理が実行されて、現在位置が測位される。
(もっと読む)
ナビゲーション装置
【課題】目的地として施設名が入力されたとき、最終到達地点において施設が進行方向左側に位置するような案内経路を探索する。
【解決手段】入力手段は、施設または地点の何れか一方を目的地として入力可能であり、制御手段は、入力手段により施設が目的地として入力されたときは該目的地に最も近い道路に属するリンクのうち進行方向が所定方向のリンクまでの最適経路を探索し、入力手段により地点が目的地として入力されたときは進行可能な方向が夫々異なる2つのリンクまでの経路の中から最適経路を探索する。
(もっと読む)
測位装置
【課題】高い周波数で測位を行いつつも、そのような周期で測位を行った際に生じる測位精度の低下を抑制する。
【解決手段】GPS信号を用いて少なくとも2種類の周期でGPS測位を行うことができるように構成されたGPS測位手段と、所定の条件に基づいてGPS測位の精度が低いか否かを判定するGPS測位精度判定手段と、GPS測位の精度が低いと判定された場合には、GPS測位手段が第1の周期でGPS測位した結果に基づいて最終的な測位結果を計算し、GPS測位の精度が低くないと判定された場合には、GPS測位手段が第1の周期よりも短い第2の周期でGPS測位した結果に基づいて最終的な測位結果を計算する最終測位結果計算手段とから測位装置を構成する。
(もっと読む)
ナビゲーション装置
【課題】経路案内において案内地点より手前の所定範囲内に1以上の類似した地点が存在する時に適切な案内を報知する。
【解決手段】ナビゲーション装置は、案内地点距離判別手段と、報知制御手段と、注意報知出力手段と、を備え、現在位置が案内地点に対する案内報知ポイントに到達したとき、案内地点距離判別手段により、案内地点の道路構造と類似した道路構造を持つ地点が、案内地点より手前の所定範囲内に1以上存在することが検出されると、報知制御手段は、注意報知出力手段を介してその旨の注意報知を出力させる。
(もっと読む)
測位システムおよび車載装置
【課題】車両の走行時における測位精度を向上させること。
【解決手段】車載装置は、測位した座標を表す車載側測位座標を含む車載側測位データを取得する車載側測位手段と、車載側測位手段が取得した車載側測位データを携帯端末装置へ送信する送信手段とを備え、携帯端末装置は、測位した座標を表す携帯側測位座標を含む携帯側測位データを取得する携帯側測位手段と、車載側測位手段および/または携帯側測位手段を測位環境に基づいて選択する選択手段と、選択手段によって選択された測位手段に係る測位座標に基づいて前記車両位置を算出する車両位置算出手段とを備えるように測位システムを構成する。
(もっと読む)
初回出力測位位置決定方法、プログラム、測位装置及び電子機器
【課題】初回に出力する測位位置の精度向上。
【解決手段】初回の測位では、捕捉されたGPS衛星信号をもとに決定現在位置Pを算出する測位処理を1回以上繰り返して行う。この各回の測位処理においては、決定現在位置P及び時刻誤差Tを算出すると、算出した決定現在位置P及び時刻誤差Tが、所定の「高度差条件」及び「収束条件」それぞれを満たすかを判定し、少なくとも一方の条件を満たすと判定した場合、決定現在位置Pを初回の測位位置として出力する。そして、初回の測位位置を決定し出力した後は、測位処理毎に、算出した決定現在位置Pを測位位置として出力する。
(もっと読む)
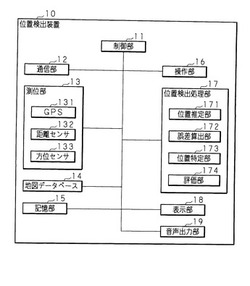
ナビゲーション装置
【課題】カメラなどの撮像機能を有するナビゲーション装置において、撮像機能を用いて撮影した画像データと撮像された被写体の位置情報を関連付けて保存する。
【解決手段】ナビゲーション装置1は、装置の向いている方位を検出する方位検出手段15と、撮影する被写体までの距離を検出する被写体距離検出手段19と、被写体位置算出手段20と、撮影手段が撮影した画像データを画像ファイルとして記憶する画像ファイル記憶手段18と、を備え、撮影手段14により被写体が撮影される際に調整された焦点距離に基づいて被写体距離検出手段19は被写体までの距離を検出し、被写体位置算出手段20は、被写体までの距離と方位検出手段15が検出した方位と現在位置検出手段11が検出した方位とに基づいて被写体の位置を特定し、画像ファイル記憶手段18は被写体の画像データと該被写体の位置情報とを対応付けて画像ファイルを記憶する。
(もっと読む)
GNSS受信装置及び測位方法
【課題】マルチパスの影響の有無を検出し、マルチパスの影響がある場合にはその影響を低減し、測定精度を向上させること。
【解決手段】複数のGNSS衛星から送信される測位信号に基づいて位置を算出するGNSS受信装置に、測位信号に基づいて求められた擬似距離の時間特性に基づいて、該測位信号がマルチパスの影響を受けて受信されたか否かを判断するマルチパス判断手段と、測位信号がマルチパスの影響を受けて受信されたと判断された場合に、擬似距離の時間特性に基づいて、直接波の位相と反射波の位相とが等しくなるゼロ点を求める位相差ゼロ点算出手段と、測位信号に基づいて求められたドップラー周波数の積算値の時間特性と、位相ゼロ点算出手段により求められたゼロ点に基づいて、擬似距離を修正する擬似距離修正手段と、修正された擬似距離に基づいて位置を求める測位演算手段とを備えることにより達成される。
(もっと読む)
車両位置特定システム、車載機及び送信機
【課題】自車の走行位置を精度良く特定することができる車両位置特定システム、車載機及び送信機を提供する。
【解決手段】車載機30は、送信機20から信号を受信した場合、信号の到達時間を算出し、到達時間に光速を積算して、送信機20からの距離を算出する。車載機30は、自車位置が送信機20の位置を中心とする球面上であることがわかる。車載機30は、自車両が走行する道路(リンク:交差点間の道路)の道路形状情報及び車載機30の高さ情報を組み合わせることで、仮想的な走行面を特定する。車載機30は、自車位置を球面と走行面とが交わる交線として特定する。
(もっと読む)
ナビゲーション装置
【課題】ナビゲーション機能以外の機能に基づく画面表示している際に、経路案内において現在位置周辺に複数の類似した案内ポイントが接近して存在する時に適切な案内を報知する。
【解決手段】ナビゲーション装置1は、表示手段17に表示された表示画面が経路案内画面か否かを判別する表示画面判別手段15と、案内地点距離判別手段19と、注意報知出力手段18と、を備え、現在位置が案内地点に対する案内ポイントに到達した際、前記表示画面判別手段15が表示手段17に表示された表示画面がナビゲーション機能以外の機能に基づく画面であると判別し、案内地点距離判別手段19が、案内経路上において、案内地点から所定範囲内の距離に案内地点の道路構造と類似した道路構造を持つ地点が所定の距離範囲内に少なくとも1以上存在すると判別した場合、注意報知出力手段18はその旨の注意報知を出力する。
(もっと読む)
GPS測位システム
【課題】GPS衛星を利用した測位に、測位地点の近くに高層建築物などの測位誤差要因が存在する場合にも高い精度で測位できる。
【解決手段】現地条件観測用GPS受信機30は、GPS衛星20からの電波受信に高層建築物40からの反射波の影響を受けやすい場所に設置され、GPS衛星からの電波受信による測位データと内部設定された絶対位置データとの偏差(ずれ分)を補正データとして周辺に送信する。GPS測位端末10Aは、現地条件観測用GPS受信機の周辺に位置したときに補正データを受信して現地点の測位データを補正する。
現地条件観測用GPS受信機に代えて、その地点の絶対位置(緯度、経度)データを周辺に送信する位置標識を備え、GPS測位端末は絶対位置データを検知して現地点の測位データを更新する。
(もっと読む)
無線LAN測位とGPS測位とを併用した移動体の連続的測位方法及び装置、並びに移動体の連続的測位プログラム
【課題】屋内外を移動する移動体の測位をGPS測位と無線LAN測位とを併用して行うにあたって、リアルタイム処理を可能とし、屋内外で連続して測位できる無線LAN測位とGPS測位とを併用した移動体の連続的測位方法及び装置、並びに移動体の連続的測位プログラムを提案する。
【解決手段】ある時点の融合結果の計算には、それ以前の無線LAN測位の結果、GPS測位の結果、及びGPS測位に付随して得られるDOPのみを使用することによりリアルタイム処理を可能にした。また、「無線LAN測位の結果とGPS測位の結果の重み付き平均」に替えて、理論的根拠が明確な重みを用いた重み付き平均を採用した。
(もっと読む)
測位システム、測位用ICチップ、測位方法及び測位プログラム
【課題】信号発生源からの信号の送信時刻を精度良く推定し、その推定により受信機の位置を精度良く測定すること。
【解決手段】受信機10は、複数のGPS衛星20から送信された複数の信号に基づいて各GPS衛星の速度ベクトルを算出する速度ベクトル算出部12と、複数の速度ベクトルから速度ベクトルの組合せを生成し、その組合せに基づいて、上記複数のGPS衛星から複数のGPS衛星を選択する衛星選択部13と、選択されたGPS衛星からの信号に基づいて、複数の時刻を該信号の送信時刻としたときに、該時刻毎に受信機10の位置を算出する位置算出部15と、算出された受信機10の複数の位置の精度を評価して、該複数の位置に対応する複数の時刻から一の時刻を送信時刻として設定し、該一の送信時刻に対応する受信機10の位置を推定位置として設定する位置精度評価部17と、を備える。
(もっと読む)
位置検出装置及び位置検出方法
【目的】GPS出力データの各成分について信頼度の有無及び誤差指標に基づいて補正処理を行って位置決定精度を向上する「位置検出装置及び位置検出方法」を提供することである。
【構成】GPSの測位周期で該GPSにより測定される車両の各方向位置成分データ及び速度成分データを用いて自律航法による位置計算結果及び該自律航法の位置計算に使用する車両速度、ピッチ角、センサー取り付け姿勢角を補正する補正処理を行い、GPSにより測定される車両の各方向の位置成分データ及び速度成分データの信頼度を判定すると共に、信頼度ありと判定された成分の誤差指標を算出し、信頼度が無いと判定された測定成分の補正処理における貢献度を零あるいは略零にし、信頼度有りと判定された測定成分の補正処理における貢献度を誤差指標の大きさに応じて小さくする。
(もっと読む)
通信システム及び車載機
【課題】自車の走行位置を精度良く特定することができる通信システム及び車載機を提供する。
【解決手段】車載機30が光ビーコン10との通信可能な領域Rに進入した場合、光ビーコン10は、車載機30が領域Rに存在することを送信機20へ通知する。送信機20は、所定の信号を車載機30へ送信する。車載機30は、その信号を受信し、車載機30と送信機20との時刻を同期させる。これにより送信機20と車載機30との間の時刻を一致させる。領域Rを通過した後、道路上の任意の地点で車載機30は、送信機20が送信した信号を受信し、受信した信号の受信時刻及びその信号の送信時刻に基づいて、送信機までの距離を求めることで自車位置を特定する。
(もっと読む)
擬似衛星利用システム、携帯型GPS測位装置、制御方法、プログラム及び記憶媒体
【課題】GPS衛星信号及び擬似衛星信号を受信して現在位置を測位する際に、衛星信号の捕捉に要する時間の増加を防ぐこと。
【解決手段】GPS機能を有する携帯型電話機1では、捕捉される衛星信号に応じて、受信モードが「GPS衛星信号高配分モード」又は「擬似衛星信号高配分モード」に切り替えられる。「GPS衛星信号高配分モード」では、衛星信号を受信する8個の受信用のチャンネル(回路)のうち、7個のチャンネルでGPS衛星信号を受信し、1個のチャンネルで第1種擬似衛星信号を受信する。そして、捕捉したGPS衛星信号を基に現在位置を算出(測位)する。また、「擬似衛星信号高配分モード」では、4個のチャンネルでGPS衛星信号を受信し、4個のチャンネルで擬似衛星信号を受信する。そして、捕捉された擬似衛星信号に含まれる位置情報を現在位置とする。
(もっと読む)
GPSレシーバ
【課題】高度誤差やマルチパスによる位置測位の精度低下を軽減させる。
【解決手段】位置測位結果の履歴を保持する保持手段と、受信したGPS信号を用いて三次元位置情報を測位する位置測位手段と、保持手段に保持された直近の履歴の高度情報を取得し、該取得した高度情報に基づいて所定の高度範囲を設定する高度範囲設定手段と、該三次元位置情報に含まれる高度情報が該所定の高度範囲内であるか否かを判定する判定手段と、該所定の高度範囲内であると判定されるときに限り、該三次元位置情報を位置測位結果として出力する出力手段とを備えたGPSレシーバを提供する。
(もっと読む)
圧力センサを用いたGNSSポジショニング
GNSSデータの精度を改良するためのシステム、方法、及びデバイスが提供される。具体的には、本発明の実施形態は、測位精度を改良するためにセンサ入力を有利に用いることができる。ナビゲーションシステム内の物理的な5つのセンサの使用、とりわけ、GNSSの高度データで調整され、且つ/又はブレンドされる圧力センサに由来する高度データは、特に有利であると見なされる。 (もっと読む)
測位方法、プログラム、記憶媒体、測位装置及び電子機器
【課題】各衛星組の現在位置候補に対する評価を受信環境に応じて適切に行うこと。
【解決手段】各衛星組の現在位置候補Pの高度のうち、最大値(最高高度)と最小値(最低高度)との差(測位高度差)が所定の閾値(例えば、200[m])を超えるならば、受信環境を「マルチパス環境」と判断し、超えないならば「オープンスカイ環境」と判断する。そして、受信環境がオープンスカイ環境の場合には、各衛星組の評価点Eを、衛星数やPDOP値等に基づく公知の評価方法により算出する。マルチパス環境の場合には、各衛星組の評価点Eを、オープンスカイ環境の場合と同様に算出し、更に、この評価点Eを、高度テーブルから取得した前回の測位位置に対応する高度と当該衛星組の現在位置候補の高度との差(高度差)に応じた変更量ΔEだけ減少させる。
(もっと読む)
61 - 80 / 129
[ Back to top ]