
Fターム[2F129BB64]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正タイミング (1,144) | 衛星による測位不良時 (525) | マルチパス (129)
Fターム[2F129BB64]に分類される特許
121 - 129 / 129
ナビゲーションシステム、マッチング方法、経路探索サーバおよびナビゲーション端末装置
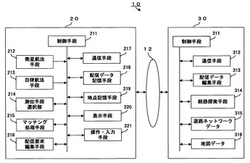
【課題】 ナビゲーション端末装置の現在位置を道路上に補正するためのマッチング処理を正確に行う。
【解決手段】 ナビゲーションシステム10は、衛星航法手段212、自律航法手段213、マッチング処理手段215、地点記憶手段219、測位手段選択部214を備えている。分岐ノードを通過した後の走行距離を自律航法手段213から取得し、分岐ノードから分岐する各リンク毎に当該リンク上の前記走行距離に基づく移動体の推定位置を示す地点情報を地点記憶手段219に記憶し、測位手段選択部214は、所定の選択条件に従って衛星航法手段212または自律航法手段213の測位出力の何れかを選択し、マッチング処理手段215は、自律航法手段213が選択された場合は自律航法手段測位結果から移動体の進行方向を判別し、地点記憶手段219を参照し、進行方向に合致するリンク上の推定位置の地点をマッチング位置として選択する。
(もっと読む)
走行支援装置

【課題】 車両位置の測位精度を向上させることができる走行支援技術を提供する。
【解決手段】 走行支援装置10は、車両800の進行方向および走行速度に基づく車両800の位置である自律位置を測位する自律測位部112と、道路上において天球CSが地物PFによって遮られる態様を示す天球情報Dspを含む道路地図情報Irmを記憶する記憶部120と、GPS信号を送信する複数のGPS衛星910の中から幾つかを天球情報Dspに基づいて選択する衛星選択部114と、選択されたGPS衛星910から送信されるGPS信号に基づく車両800の位置である他律位置を測位する他律測位部116と、測位された他律位置を用いて、自律位置に生じる累積誤差を補正する誤差補正部118とを備える。
(もっと読む)
ナビゲーション装置の初期位置決定方法
【課題】本発明は、移動通信端末機の位置決定方法に関し、特に、移動通信端末機の位置を決定する無線測位の誤差を改善することで、測位の正確度を向上させるためのGPS衛星の配置を利用した歩行者ナビゲーション装置の初期位置決定方法に関する。
【解決手段】本発明は、ナビゲーション装置の初期位置決定方法において、閾値以上のGPS信号の強度で受信されるGPS(Global Positioning System)衛星の数を算出するステップと、前記受信されたGPS信号から少なくとも2領域の何れか一つに位置するGPS衛星の数を算出するステップと、前記各領域でのGPS衛星の数を比較した結果に従い、初期位置を決定するステップとを含む。
(もっと読む)
測位航法用擬似距離推定回路、移動体測位装置及び移動体測位方法
【課題】INSとGPSの両航法における位置情報の入力側の正確度を高め、更に帰還情報の質を高めて、結果的により正しい位置情報を得る。
【解決手段】本発明の移動体測位装置は、測位衛星からの複数の擬似距離と、また測位航法部と慣性航法部とカルマンフィルタと、により移動体の航法位置を求める測位装置において、測位衛星と移動体間のドップラ観測値と、航法暦とカルマンフィルタ出力とにより測位衛星と移動体間の相対速度の計算をしてドップラ推定値を求め、複数の擬似距離から選択擬似距離を出力する衛星情報選択部13と、測位衛星から得る搬送波位相情報と選択擬似距離とカルマンフィルタの出力とで演算出力する擬似距離推定部14とを備えて、測位航法部15は、擬似距離推定値を入力として、測位航法速度と測位航法位置を出力し、カルマンフィルタ16は、擬似距離推定値と、測位航法部の出力と慣性航法部の出力とで状態推定値を求める。
(もっと読む)
歩行者ナビゲーション装置、歩行者ナビゲーション方法及びプログラム
本発明の歩行者ナビゲーション装置(10A)は、現在位置情報をGPS(20)から獲得する位置情報受信部(12)と、受信した現在位置情報を解析して現在位置を算出する位置情報解析部(13)と、地図情報を記憶するMAPDB(14)と、マルチパスの影響を制御するためのマルチパス制御距離を指定するマルチパス制御部(17)と、位置情報解析部(13)で算出した現在位置と、MAPDB(14)に記憶されている地図情報と、マルチパス制御部(17)で指定されたマルチパス制御距離とに基づいて、現在位置表示情報を算出する中央処理部(11)と、現在位置表示情報を表示する表示部(15)と、距離指定値や経路検索条件の入力及びナビゲーション開始指示を行う入力部(16)と、を備える。 これにより、マルチパスの影響を適宜補正して正確に歩行者の経路をナビゲーションすることができる歩行者ナビゲーション装置を提供する。 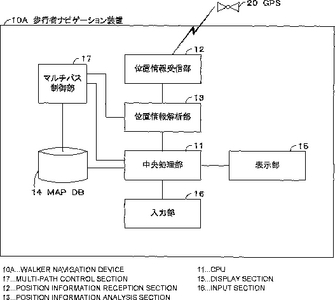 (もっと読む)
(もっと読む)
ナビゲーション装置
【課題】 測位誤差の補正精度を高めることができる「ナビゲーション装置」を提供すること。
【解決手段】 ナビゲーション装置は、複数のGPS衛星から送信される電波を受信して測位位置を出力するGPS受信機2と、GPS受信機2による今回の測位タイミングにおける測位位置が含まれる予測誤差範囲を設定する誤差範囲設定部12と、今回の測位タイミングにおいてGPS受信機2から出力された実際の測位位置が予測誤差範囲に含まれるときに実際の測位位置を用い、実際の測位位置が予測誤差範囲に含まれないときに、実際の測位位置と予測誤差範囲との相対的な位置関係に基づいて測位位置の補正を行う相対位置判定部14および位置補正部16とを備えている。
(もっと読む)
電子メディア露出測定システムの精度および到達率を向上させるための方法および装置
電子メディア露出測定システムの精度および到達率を向上させるための方法および装置が開示されている。開示されている方法は、電子デバイスによって記録された場所を表すデータを当該データの完全性または精度のうちの少なくとも1つを向上させるべく処理すること、処理されたデータから位置決定を導出すること、および、導出された位置決定のうちの少なくとも1つを既知の移動コースと整列するべく修正することを含む。 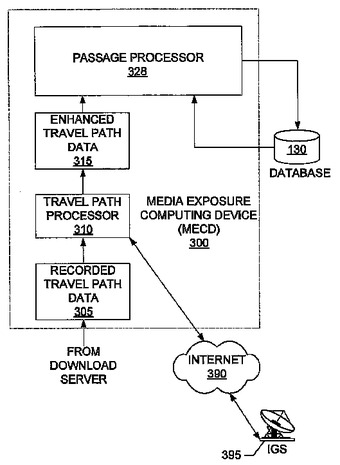 (もっと読む)
(もっと読む)
2周波数の一方で測定データが利用できない場合に短期間バックアップ2周波数ナビゲーションを行なう方法
本発明は、2周波数ナビゲーションが依存する2周波数の一方が利用できない場合に、短期間バックアップ2周波数ナビゲーションを実行する方法を含んでいる。本方法は、維持されている周波数上の搬送波位相測定値および電離層屈折効果のモデルを用いて、利用できない周波数上の符号および搬送波位相測定値を合成して、両方の周波数上の測定値が利用できる場合に更新するステップを含んでいる。 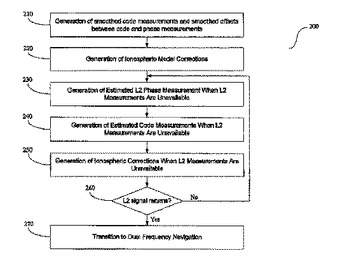 (もっと読む)
(もっと読む)
慣性システム用の入力された位置合わせデータを使用する慣性GPSナビゲーションシステム
慣性(「INS」)/GPS受信機は、それが、始動中に動いているときには、入力された位置合わせデータを使用してINSサブシステムの位置合わせを決定する。位置合わせデータは、パラメータ化された表面情報、測定されたGPS速度、及び、受信機が搭載されている乗物と、慣性測定ユニット(「IMU」)の加速度計及びジャイロスコープに関連する慣性測定基準、または、ボディ、フレームとの間の既知のまたは既定の角度関係から決定される。制約をもたらすパラメータ化された表面情報は、受信機を収容している乗物が移動している表面の配向とすることができる。受信機は、初期のGPS位置を使用して、パラメータ化された表面上、したがって、既知の表面の配向上の乗物の位置を決定する。受信機は、次に、関連するGPS速度ベクトルを使用して、表面上の乗物のロール、ピッチ、及び方位を決定する。その後、受信機は、乗物の計算されたロール、ピッチ、方位、及び、乗物とIMUボディフレームとの間の既知のまたは既定の角度関係を使用して、IMUボディフレームを受信機によって使用される計算上のフレームまたは基準フレームに関連付ける回転行列を決定する。 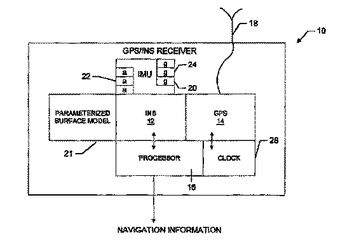 (もっと読む)
(もっと読む)
121 - 129 / 129
[ Back to top ]