
Fターム[2F129GG10]の内容
航行(Navigation) (246,646) | 他の航行体搭載機器との連携 (8,583) | 安全/走行支援 (3,448) | 制御・警報発生の検出対象 (1,391) | 他車両検知 (331)
Fターム[2F129GG10]に分類される特許
261 - 280 / 331
車両用案内表示装置
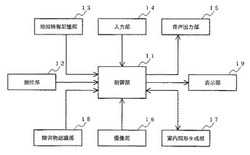
【課題】車両前方方向の様子を示す画像における障害物の視認性と、車両が進行すべき方向を示す案内図形の視認性とを両立すること。
【解決手段】測位部12によって検出された車両の現在位置と、入力部14からの経路探索するための情報と、地図情報記憶部13の地図情報とを用いて探索した経路に基づいて、探索された経路の誘導案内の対象に含まれる案内対象地点における車両の進路方向の案内図形を作成する案内図形生成部17は、障害物認識部18によって車両と案内対象地点の間に障害物を認識した場合、障害物認識部18によって測定した車両と障害物との間の距離に応じた形状の案内図形を作成する。制御部11は撮像部16によって取得された車両の前方方向の画像に当該案内図形を重畳して、表示部19に表示させる。
(もっと読む)
車両の周辺監視装置

【課題】複数の撮像手段を介して取得される画像から車両周辺の対象物を検出する際に、検出対象物と背景対象物とが基準画像上で重なる可能性を低減して、対象物を精度良く検出することができる車両の周辺監視装置を提供する。
【解決手段】車両10に搭載された撮像手段2R,2Lを介して取得した画像から、車両10の周辺に存在する対象物を検出する。撮像手段2R,2Lを介して取得された画像のうちの所定の基準画像に対して、対象物を抽出する処理を実行する対象物抽出手段1と、車両10の走行環境を検出する走行環境検出手段1と、検出された走行環境に応じて対象物抽出手段1の処理で使用する基準画像を新たに選択する基準画像選択手段1とを備える。
(もっと読む)
車両用走行制御装置
【課題】自車が走行する道路の種類に基づいて最適な走行制御手段を実行させる車両用走行制御装置を提供することを目的とする。
【解決手段】車両を設定速度で走行させる定速走行制御手段10と車両を設定車間距離で走行させる追従走行制御手段11とを有する車両用走行制御装置1は、車両位置における道路の種類を識別する道路種類識別手段12と、道路種類識別手段12により識別された道路の種類に基づいて、実行する走行制御手段を選択する走行制御選択手段13とを備える。
(もっと読む)
車車間通信システム
【課題】自車両と分岐点を同一方向に進む先行車両から挙動変化に関する挙動変化情報を取得し、取得した挙動変化情報に基づいて走行を案内することにより、分岐点を走行する後続車両に対して有益な情報を選別して付与することを可能にした車車間通信システムを提供する。
【解決手段】高速道路等の本線に合流する為の加速レーンに進入した際に、加速レーンから本線への合流を行う分岐点を自車と同一方向に進む先行車両を検出し(S23)、先行車両から取得した交通情報や挙動変化情報に基づいて後続車両の分岐点における走行を補助する案内を作成し(S29)、作成した案内を液晶ディスプレイ10やスピーカ11により出力する(S30)ように構成する。
(もっと読む)
経路案内システム及び経路案内方法
【課題】案内点で円滑に運転操作を行うことができるようにする。
【解決手段】自車の現在地を自車位置として検出する現在地検出部と、自車位置に基づいて目的地までの探索経路を探索する経路探索処理手段と、探索経路上の案内点を通過するのに推奨される車速を表す案内点推奨車速を算出する推奨車速算出処理手段と、現在の車速及び案内点推奨車速に基づいて、案内点の手前の、運転者が制動を開始する地点に対応させて特定の経路案内地点である特定経路案内地点を設定する特定経路案内地点設定処理手段と、自車が特定経路案内地点に到達すると、案内点について特定経路案内地点用の経路案内を開始する地点案内処理手段とを有する。音声の出力が終了した後に、運転者が余裕を持って運転操作を行うことができる。
(もっと読む)
経路案内システム及び経路案内方法
【課題】案内交差点より手前側にバスレーンがある場合に、適切なレーン案内を行うことができるようにする。
【解決手段】自車の現在地を自車位置として検出する現在地検出部と、自車位置に基づいて目的地までの探索経路を探索する経路探索処理手段と、道路におけるレーン情報を取得するレーン情報取得手段と、レーン情報に基づいて、探索経路上にバスレーンがあるかどうかを判断するバスレーン判定処理手段と、レーン情報に基づいて、現在の時刻が規制時間帯であるかどうかを判断する規制内容判定処理手段と、探索経路上にバスレーンがあり、現在の時刻が規制時間帯である場合に、探索経路に基づいて、走行するのが推奨される推奨レーンを補正して設定する推奨レーン設定処理手段とを有する。自車を走行させることができないにもかかわらず、バスレーンが推奨レーンとされることがなくなる。
(もっと読む)
車両間情報通信システム
【課題】地物に対してナビゲーション情報或は走行制御情報の生成を実行しようとする車両間情報通信システムにおいて、自車が検出することができる限界を超えて、正確且つ適切な情報を生成することができる車両間情報通信システムを得る。
【解決手段】送信車両Coが、走行路に沿って存在する地物Xを認識する地物認識手段を備えるとともに、認識された認識地物Xに関連の情報である地物関連情報を受信車両に送信可能に構成され、送信車両Coと受信車両Ciとの車両位置関係を検出する位置関係検出手段を設け、受信車両Ciで、送られてくる地物関連情報及び車両位置関係に基づいて、受信車両からみた認識地物Xを対象とするナビゲーション情報若しくは走行制御情報を生成する。
(もっと読む)
経路案内システム及び経路案内方法
【課題】リバーシブルレーンが存在する場合に、適切なレーン案内を行うことができるようにする。
【解決手段】現在地検出部と、経路探索処理手段と、道路におけるレーン情報を取得するレーン情報取得処理手段と、探索経路上にリバーシブルレーンがあるかどうかを判断するリバーシブルレーン判定処理手段と、リバーシブルレーンを通過可能であるかどうかを判断する規制判定処理手段と、走行するのが推奨される推奨レーンを補正して設定する推奨レーン設定処理手段とを有する。リバーシブルレーンを通過可能でない場合、推奨レーンが補正されるので、自車を走行させることができないにもかかわらず、リバーシブルレーンが推奨レーンとされることがなくなる。自車が走行不能なレーンに誘導されることがなくなり、適切なレーン案内を行うことができる。
(もっと読む)
安全運転度蓄積システム,車載機器,およびセンタ
【課題】より多くの運転者の挙動を検出し、検出された挙動に応じて運転者に何らかのメリットを与え、安全運転を励行する安全運転度蓄積システム,車載機器,およびセンタを提供する。
【解決手段】車両に搭載された車載機器とデータ送受信可能にネットワーク接続されたセンタとを含む安全運転度蓄積システムであって、車載機器は、運転者による車両の運転操作から安全運転度を算出する安全運転度算出手段と、算出された安全運転度を累積して記録する車両側安全運転度記録手段と、安全運転度を表示する表示手段と、安全運転度をセンタに送出する送出手段と、を備え、センタは、車載機器から送出された安全運転度を取得する安全運転度取得手段と、取得された安全運転度を累積して記録するセンタ側安全運転度記録手段と、を備えることを特徴とする安全運転度蓄積システムとして提供可能である。
(もっと読む)
車載地図表示装置
【課題】3次元地図画像を表示する車載地図表示装置において、建物以外にも実際に見えるものを表示して、3次元地図画像の見た目のリアル感を向上させる。
【解決手段】自車両の前方に建物等の構造物の反射壁面があるか否かを判定し(ステップS40)、反射壁面があると判定された場合は、昼間であり(ステップS50)かつ晴天であれば(ステップS60)、予め記憶された自車両の車種や車体色に関する情報を読み出す(ステップS70)。この情報に基づいて、3次元地図画像の反射壁面上に自車両の映り込み画像を表示する(ステップS80)。
(もっと読む)
分岐判断装置及び車両用ナビゲーションシステム
【課題】路面に白線が引かれていない状況や路面に引かれている白線が不鮮明な状況であっても、自車両がいずれの分岐道路に進行したかを適切に判断する。
【解決手段】分岐判断装置2は、自車両進行方向を撮影する車載カメラ5により連続的または間欠的に撮影された映像を分析して映像内での目標物の相対位置の変化を検出し、その検出された映像内での目標物の相対位置の変化を判断して自車両がいずれの分岐道路に進行したかを判断する。例えば幹線道路から右前方向に支線道路が敷設されており分岐点に目標物が存在している状況であれば、自車両が分岐点を通過した後に映像内での目標物の相対位置が右側から左側に移動していれば、自車両が分岐点を通過して支線道路に進行した(右折した)と判断できる。
(もっと読む)
運転支援装置、運転支援システムおよび運転支援プログラム
【課題】的確な運転支援を可能にする運転支援装置、運転支援システムおよび運転支援プログラムを提供する。
【解決手段】本運転支援システムによると、他車両100のナビゲーション装置120では、他車両100の制動に関する他車制動情報を生成し、それをランプ制御ECUに出力して、他車両100の外部にブレーキランプ146による光データを送信する。自車両200では、他車両100のナビゲーション装置120から出力された他車制動情報を取得し、これに基づいて自車両200の制動に関する自車制動情報を生成しこの自車制動情報をディスプレィや制動アシストECUに出力する。これにより、他車両100の制動に関する他車制動情報に基づいて当該他車両100の将来の挙動を予測することがある程度可能になるため、このような予測可能な他車両100の将来の挙動をも踏まえて自車制動情報を生成することができ、的確な運転支援を可能にする。
(もっと読む)
車両走行支援装置
【課題】目視困難な領域の複数車両の走行位置関係、これら車両の速度減速、車線変更、右左折などの報知状況、道路形状、信号、道路標識や歩行者、自転車を含む道路状況などの情報を正確に把握し、自車の安全な走行情報を提示できる車両走行支援装置の提供。
【解決手段】本発明の車両走行支援装置は、車両走行支援情報を外部から受信する通信部211と、車両走行支援情報から他車両の走行位置を解析する車両走行位置解析部213と、車両走行支援情報から他車両の報知状況を解析する車両報知情報解析部214と、他車両の走行位置および他車両の報知情報を用いて他車両の移動を予測する移動予測部216と、移動予測部216で予測した他車両の移動予測情報を用いて自車両の走行情報を生成する走行情報生成部217とを備えたことにより、自車の安全な追い越し、車線変更、右左折などの走行支援が可能となる。
(もっと読む)
有料道路料金所の通行案内装置
【課題】有料道路料金所を安全に通行できるように運転者を案内する有料道路の通行案内装置を提供する。
【解決手段】車両前方を撮像する車載カメラ20を備え、画像解析手段122により、その車載カメラ20によって撮像された画像を解析して料金所ゲートにETCレーンがあるか否かを判断する。そして、第1通知手段124では、画像解析手段122によって判断されたETCレーンの有無に基づいて運転者に通知するレーン案内情報を決定する。このように、車載カメラ20によって撮像した画像を解析することによってETCレーンの有無を判断すれば、ETCレーンと一般レーンとを誤って認識したり、稼動していないレーンをETCレーンであると認識してしまったりすることはないので、誤った内容のレーン案内情報を通知することがなくなる。従って、運転者は、通知されるレーン案内情報に従うことにより、有料道路料金所を安全に通行できるようになる。
(もっと読む)
経路案内システム及び経路案内方法
【課題】運転者が車両を非推奨領域に沿って走行させたときに、適切なレーン案内を行うことができるようにする。
【解決手段】自車の現在地を自車位置として検出する現在地検出部と、自車位置に基づいて目的地までの探索経路を探索する経路探索処理手段と、探索経路に基づいて、走行するのが推奨されるレーンを推奨レーンとして設定する推奨レーン設定処理手段と、自車が、走行するのが推奨されない非推奨領域に進入したかどうかを判断する非推奨領域判定処理手段と、自車が非推奨領域に進入した場合、非推奨領域の接続先のレーンが推奨レーンであるかどうかを判断する推奨レーン判定処理手段と、非推奨領域の接続先のレーンが推奨レーンである場合、レーン案内を行わない誘導判定処理手段とを有する。
(もっと読む)
カーナビゲーションシステム
【課題】ルートガイダンス中に所定の案内ポイントに近付いたことを、判りやすくドライバに知らせることができ、しかも、そのための構成を比較的簡単に済ませる。
【解決手段】運転席の左側部に、回動操作及び押圧操作が可能な操作部19を有する遠隔操作装置2を設ける。ケース18内に、左側、右側を振動させる振動子23,24を設ける。遠隔操作装置2の制御部17にカーナビゲーション装置1を接続する。カーナビゲーション装置1は、ルートガイダンスの実行時に、自車位置が所定の案内ポイントに近付いたときに、制御部17に対して案内信号(左折指示、右折指示)を出力する。制御部17は、案内信号が入力されたときに、各振動子23,24を駆動制御し、遠隔操作装置2を振動させる。
(もっと読む)
緊急車両回避支援装置、及び情報提供装置
【課題】緊急車両が接近してきた場合に適切な回避措置が行えるように、緊急車両に対する適切な回避支援を事前に行うことのできる緊急車両回避支援装置10を提供すること。【解決手段】自車位置を検出する自車位置検出部11と、自車位置検出部11で検出された自車位置情報と、記憶部12に記憶された緊急車両の過去の走行経路に関する情報とに基づいて、緊急車両の通行頻度が閾値以上の経路に自車両が位置しているか否か判断する自車位置判断手段と、自車位置判断手段により緊急車両の通行頻度が閾値以上の経路に自車両が位置していると判断された場合、緊急車両が接近してきた場合に備えた事前の回避支援を行う事前回避支援処理手段とを装備する。 (もっと読む)
車両制御装置及び車両管制装置
【課題】交差点における車両の走行支援を適切に行うこと。
【解決手段】車両制御装置は、車両の方向指示操作に基づいて、交差点における車両の進行方向を判断し、その判断に基づいて、交差点を通過する車両の減速度を制御する。また、車両制御装置は、交差点への車両の接近を検出する接近検出手段と、接近検出手段により交差点への車両の接近が検出されたとき、車両の運転者に対して、方向指示操作を要求する操作要求手段と、を備えている。
(もっと読む)
交差点での運転支援方法及び運転支援装置
【課題】見通しの悪い交差点のみ、現在走行している道路と交差する道路の画像を表示させることができる交差点での運転支援方法及び運転支援装置を提供する。
【解決手段】前方にT字路があると判断すると、CPU2はフロントカメラCA2を起動させフロントカメラCA2が撮像した撮像領域Z0のフロント画像データG2を使って画像プロセッサ10に対して見通しの良いT字路かどうか画像認識によって判別させる。CPU2は画像プロセッサ10の判別結果が見通しの良いT字路と判別すると、新たなT字路が見つかるまで道路案内画像をディスプレイ11に表示しながら走行する。一方、画像プロセッサ10が見通しの悪いT字路と判別すると、CPU2はブラインドコーナカメラCA1を起動させブラインドコーナカメラCA1が撮像した左側撮像領域Z1及び右側撮像領域Z2の画像をブラインドコーナ画像として道路案内画像に替えてディスプレイ11に表示させる。
(もっと読む)
車両用運転支援装置および車両用運転支援方法
【課題】自車両の走行状態に応じて、他車両の情報をドライバに報知する。
【解決手段】注意交差点判定部12によって、自車両が見通しの悪い注意交差点に接近したと判定した時に、車速センサ4によって検出される車速が所定車速以下であれば、無線通信装置1によって受信した他車両の情報をディスプレイ7に表示し、車速が所定車速より高ければ、他車両の情報をディスプレイ7に表示しない。
(もっと読む)
261 - 280 / 331
[ Back to top ]