
Fターム[2F129GG10]の内容
航行(Navigation) (246,646) | 他の航行体搭載機器との連携 (8,583) | 安全/走行支援 (3,448) | 制御・警報発生の検出対象 (1,391) | 他車両検知 (331)
Fターム[2F129GG10]に分類される特許
61 - 80 / 331
緊急車両支援システム及び緊急車両支援方法
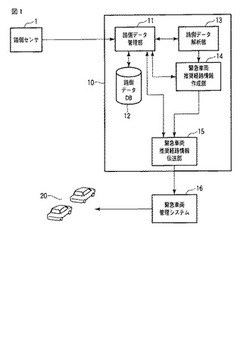
【課題】道路交通状況を考慮した走行支援情報を緊急車両に提供するようにして、緊急車両の有効な走行支援を実現することにある。
【解決手段】緊急車両20が走行するときの走行支援情報として、最適な経路情報を提供する緊急車両支援システムである。本システムは、緊急車両20が走行するときの道路交通状況を動的に認識し、この道路交通状況に基づいて緊急車両20の走行に適した経路情報を生成する管制センターシステム10を有する構成である。
(もっと読む)
車両運転支援装置及び支援方法

【課題】移動体の挙動予測を効率的に行って接触の可能性を迅速に判断し、適切なタイミングで警告情報を提示できるようにする。
【解決手段】車両に搭載されたカーナビゲーションシステム10のナビゲーションECU11が、第1光ビーコン4から受信した運転支援情報に含まれる交差点構造情報に基づいて、サービス対象交差点における移動体検知エリアを複数のエリアに分割し、CAN経由で取得される車速情報に基づいて、分割した複数のエリアの優先順位を決定する。そして、優先順位の高いエリアから順に当該エリアに存在する歩行者や自転車の挙動を運転支援情報に含まれる移動体状態情報に基づいて予測し、その予測結果とCAN経由で取得される車両情報とに基づいて注意喚起の必要性を判断して、注意喚起の必要性ありと判断した場合に、ディスプレイ14での画面表示やスピーカ15からの音声出力により警告情報を提示する。
(もっと読む)
車両位置演算装置及び車両位置演算方法
【課題】低コスト化を実現できる車両位置演算装置を提供する。
【解決手段】複数車線道路のうち、一の車線を走行する自車両の位置を計測する自車両位置計測手段と、複数車線道路のうち、他の車線を走行する他車両を検出するセンサ11と、センサ11の検出信号に基づき、自車両に対する他車両の方位を演算する他車両方位演算手段と、一の車線と他の車線との間隔を特定する車線間隔特定手段と、自車両の位置、他車両の方位及び間隔に基づいて、他車両の位置を演算する他車両位置演算手段を有する。
(もっと読む)
車両制御装置および車両制御方法
【課題】 車速変動の伝播を抑制することができる車両制御装置および車両制御方法を提供する。
【解決手段】
本発明に係る車両制御装置および車両制御方法においては、交通流量が最大化される自車11の減速制御をおこなう際、自車11と先行車両12との車間距離が所定の範囲内にあるときには、交通流量が最大化される車間距離と車速に自車を減速制御し、自車11と先行車両12との車間距離が所定の範囲内にないときには、交通流量が最大化される速度のみに自車を減速制御する。それにより、交通流量が最大となる車間距離をサグ部に到達するまでに確保できない事態や維持できない事態が生じた場合であっても、少なくとも交通流量が最大となる車速となるように自車11を減速制御するため、車速変動の伝播が効果的に抑制され、サグ渋滞の抑制につながる。
(もっと読む)
車両位置演算装置及び車両位置演算方法
【課題】低コスト化を実現できる車両位置演算装置を提供する。
【解決手段】自車両Aの位置Aを計測する自車両位置計測手段と、他車両Bにより発生する音を検出する音センサ11と、音センサ11の検出信号に基づき、自車両Aに対する他車両Bの方位を演算する他車両方位演算手段と、道路上の特定地点を表すノード及び特定地点間の接続を表す道路リンク301,302を含む地図データ12と、自車両Aの位置A、他車両の方位及び地図データに基づいて、道路リンク302上における他車両Bの位置Bを演算する他車両位置演算手段を有する。
(もっと読む)
運転誘導装置
【課題】潜在的な危険に対する安全性をより向上させ、有益な情報を提供することが可能な運転誘導装置を提供する。
【解決手段】判定処理ECU40が、自車両V0の通過領域である移動領域TRと、自車両V0の周辺に潜在的に存在する移動体V1等について、移動体V1等の通過領域である移動領域TRを予測する。判定処理ECU40は、予測した自車両V0と移動体V1等との移動領域TRとの重複領域に基づいて、移動領域TRの重要度Iを算出するため、潜在的な危険に基づいて自車両V0が通過する領域における運転の難易度を算出できる。判定処理ECU40は、算出した重要度IとドライバーDの運転技量Tとに応じて自車両V0が将来走行すべき経路を設定し、運転支援ECU50が設定した経路にドライバーDを誘導するため、潜在的な危険に対する安全性をより向上させ、有益な情報を提供することが可能となる。
(もっと読む)
物体検出装置、情報処理方法、および、情報処理システム
【課題】カメラで撮影した画像内の物体の種類を判定する場合の電子制御装置の処理負荷を軽減する技術を提供する。
【解決手段】レーダ装置により検出したレーダ情報に基づいて、物体の種類を予測する。その予測した物体の種類をもとにカメラで撮影した1フレームの画像の所定の画像範囲を切り出して、電子制御装置により物体の種類判定を行う。これにより電子処理装置の画像による物体の種類判定の処理負荷が軽減される。
(もっと読む)
運転支援装置
【課題】ヒヤリ・ハット事象の発生地点(ヒヤリ・ハット地点)の判別性能を向上し、飛び出しや出会い頭の衝突の可能性が高い有用なヒヤリ・ハット地点を判別して有用な地点のみの記録や表示を可能にする。
【解決手段】制御処理部41により、自車1の衝突回避の挙動変化を検出し、自車1の現在の走行環境が衝突予測の困難な状況か否かを判断し、この判断に基づき、自車1の現在の走行環境が衝突予測の困難な状況であれば前記挙動変化が真のヒヤリ・ハット事象によるものであるとして、前記挙動変化が真のヒヤリ・ハット事象によるものか否かを判別することにより、衝突予測の困難な状況の地点であって、車両や歩行者の飛び出しや出会い頭の衝突が発生しそうなな真のヒヤリ・ハット地点のみを判別して記録や表示を可能にする。
(もっと読む)
危険性判断装置及び危険性判断システム
【課題】所定エリア内に存在する車両の危険性を判断する技術において、処理負荷の低減を図ることが可能な危険性判断装置及び危険性判断システムを提供すること。
【解決手段】自車両が所定エリアを通過する際に、衝突危険性を判断する装置において、所定エリアに対する危険度の重み付けを設定し、危険度が高い場合のみ衝突危険性を判断する。これにより、実際に危険性が高い場合のみ衝突危険性を判断することができるため、処理負荷が軽減される。
(もっと読む)
運転操作評価装置
【課題】運転者による運転操作を車両の周囲の状況に応じて適正に評価する。
【解決手段】運転操作評価ECU1は、該車両の周囲に存在する他の車両、歩行者を含む移動体の該車両からの距離、及び、相対速度を検出する移動体検出部101と、検出された移動体の該車両からの距離、及び、相対速度に基づき、仮想的な優良運転者の運転操作を推定する優良操作推定部108と、該車両の運転者による運転操作を検出する運転操作検出部104と、優良操作推定部108によって推定された仮想的な優良運転者の運転操作に基づき、運転操作検出部104によって検出された運転操作の適否を評価する操作評価部110と、を備える。
(もっと読む)
運転支援装置及びプログラム
【課題】交差点の通過に伴う運転動作に関する評価を行う運転支援装置及びプログラムを提供する。
【解決手段】運転支援装置は、交差点に進入する前に走行した進入車線を特定し、進入車線に対応づけられる交差点を退出した後に走行すべき走行予定道路を特定する。また、交差点を退出後に走行した退出道路を特定し、退出道路と走行予定道路とが一致しない場合(S206:NO)、交差点に進入する進入動作を危険動作であると判定する(S207)。これにより、退出道路と走行予定道路とが一致しない場合、交差点に進入する進入動作を危険動作と判定するので、交差点の通過に伴う運転動作を適切に評価することができる。
(もっと読む)
車両用制御装置
【課題】この発明は、他車両との衝突可能性の判定を精度良く行うことができ、自車両と他車両を同一方法で電子地図上にマッチングすることができ、信頼性を高めることができ、地図データを簡略化し、カーナビゲーション装置を利用する必要のない車両用制御装置を提供することを目的とする。
【解決手段】この発明は、車両用制御装置において、マップマッチング手段により得られる、自車両が次に走行すると推定される交差点と他車両が次に走行すると推定される交差点とを比較し、一致する場合に自車両と他車両が衝突する可能性があると判定する衝突可能性判定手段を備え、衝突可能性判定手段により判定された結果に基づいて、運転者に情報を提供する情報提供手段とを備えることを特徴とする。
(もっと読む)
車載用通信装置
【課題】走行地域の運転に不慣れな運転者の存在を他の車両の運転者に認識させて、その運転者が配慮のある運転を可能となり、安全性の高い走行を実現できる車載用通信装置を提供する。
【解決手段】車両に搭載される車載用通信装置において、自車位置に関する情報と、車両の登録ナンバー情報および/または運転者の住所情報に基づき運転慣れ度を決定する運転慣れ度決定部と、前記運転慣れ度決定部が決定した運転慣れ度に応じて自車位置情報を送信するか否かを決定する送信決定部と、前記送信決定部が自車位置情報を送信することを決定した場合、少なくとも自車位置情報を他車両に搭載された車載用通信装置に直接的または間接的に送信する送信部と、を備える車載用通信装置とした。
(もっと読む)
車載地図表示装置、車両制御システム
【課題】車々間通信により他車両からのデータを受信し、そのデータに基づいて特定される他車両の位置を地図上に表示する車載地図表示装置において、表示対象となる他車両の数が多くなっても処理負荷の増大を抑える。
【解決手段】地図を表示し(ステップS20)、自車両の位置を示す自車マークをその地図上に表示する(ステップS30)と共に、受信された他車両の位置情報に基づいて、他車両の位置を示す他車マークを地図上に表示する(ステップS140)。複数の他車両から位置情報が送信された場合、他車マークに替えて、複数の他車両の位置をまとめて示す他車群マークを地図上に表示する(ステップS120、S130)。
(もっと読む)
車載表示装置
【課題】先行車両が存在する場合における自車前方の視認性を向上する。
【解決手段】自車の前方を撮影する前方カメラ11の撮影映像に画像認識処理を施して自車の直前に位置する先行車両の車両ナンバーを特定する。通信部10を介して、車両前方を撮影するカメラ21を搭載した車両より当該車両の車両ナンバーが付加されたカメラの撮影映像を受信した場合、画像認識処理を施して特定した先行車両の車両ナンバーと一致する車両ナンバーが付加されたカメラの撮影映像を、自車の直前に位置する先行車両の撮影映像として特定し、この先行車両の撮影映像を表示部14に表示させる。
(もっと読む)
運転支援システム、運転支援方法、及び運転支援プログラム
【課題】自車両の周辺状況に応じて自車両への運転支援を行う運転支援システム、運転支援方法、及び運転支援プログラムにおいて、運転支援の精度を向上する運転支援システム、運転支援方法、及び運転支援プログラムを提供する。
【解決手段】現在の自車両と前方他車両との相対関係である車間時間Tsを取得して、当該車間時間Tsに自車両の走行情報である減速度Ggを対応付けて記憶する記憶部から、取得された車間時間Tsに対応する減速度Ggを抽出し、現在の自車両Cの減速度と抽出された減速度Ggとを比較して、現在の自車両の減速度と抽出された減速度Ggとが異なる場合に走行に関する案内を行う。
(もっと読む)
車載装置及び車両認識方法
【課題】周辺の車両に関する情報を取得する処理を軽減することができる車両認識方法及び車載装置を提供する。
【解決手段】運転支援装置1のCPU2は、車両に設けられた周辺監視カメラ20から周辺撮像データを取得する。また、画像プロセッサ10は、周辺撮像データ内で、隣接車線領域を設定し、隣接車線領域内に認識部分枠を設定する。さらに、画像プロセッサ10は、認識部分枠内の輝度データと、後方監視カメラ21により撮像された後方撮像データのサンプル枠内の輝度データとを比較し、路面上の物体を検出する。そして、検出物ありと判断された認識部分枠とその周辺に対し、エッジ検出を行って、他車両を認識する。
(もっと読む)
無線装置
【課題】衝突事故を防止するために有効な走行状況を報知する技術を提供する。
【解決手段】取得部62は、車両の位置情報を測位する。設定部304は、測位した位置情報に対応づけられる地図情報において、出発地点から目的地点への経路を設定する。特定部306は、設定した経路において、交差点へ将来的に進入する場合に、進行すべき道路を特定する。生成部64は、特定した道路を進行方向情報としてパケット信号に格納するとともに、測位した位置情報もパケット信号に格納するように、パケット信号を生成する。変復調部54、RF部52、アンテナ50は、生成したパケット信号を送信する。
(もっと読む)
車両用表示装置
【課題】運転者からの視認性が悪化した状態においても、有用な画像情報を表示して、運転の支援を行うことが可能な車両用表示装置を提供する。
【解決手段】車両に搭載され、乗員に各種の画像情報を表示する表示手段と、車両の現在位置を特定する位置特定手段と、車両の走行方向を特定する走行方向特定手段と、車両の走行時に該車両の乗員が視認することが可能と予想される該車両の周囲の風景が撮影された車両周囲画像を予め記憶する車両周囲画像記憶手段と、車両周囲画像を表示手段に表示するための、予め定められた車両周囲画像表示条件が成立したか否かを判定する車両周囲画像表示条件判定手段と、車両周囲画像表示条件が成立したと判定したときに、車両周囲画像記憶手段から車両の現在位置および走行方向に対応した車両周囲画像を読み出して、運転支援画像として表示手段に表示する表示制御手段と、を備えることを特徴とする。
(もっと読む)
運転支援システム
【課題】信頼性の高い運転支援を行うことができる運転支援システムを提供する。
【解決手段】運転支援システム1は、路側装置で検知された路車間情報を受信する路車間通信機2、他車両から車車間情報を受信する車車間通信機3、及び自車両Xの運転支援を実施するECU10を備えている。この運転支援システム1では、通常時に路車間情報を優先的に用いた運転支援を実施すると共に、路側装置の検知精度が規定値以下の場合、路車間情報に対し車車間情報を補完するようマージ(融合)させて運転支援を実施している。つまり、路側装置21の検知精度に応じて路車間情報に車車間情報を付加し、この路車間情報で運転支援を行っている。そのため、路側装置の検出精度に起因して運転支援レベルが低下するのを抑制することができる。
(もっと読む)
61 - 80 / 331
[ Back to top ]