
Fターム[2F129GG10]の内容
航行(Navigation) (246,646) | 他の航行体搭載機器との連携 (8,583) | 安全/走行支援 (3,448) | 制御・警報発生の検出対象 (1,391) | 他車両検知 (331)
Fターム[2F129GG10]に分類される特許
141 - 160 / 331
隊列走行システム
【課題】隊列の全体の消費エネルギーを小さくすることができるようにする。
【解決手段】自車情報を取得する自車情報取得処理手段と、周辺車両11についての周辺車両情報を取得する周辺車両情報取得処理手段と、自車情報及び周辺車両情報に基づいて、隊列走行に移行するかどうかを判断する隊列走行判定処理手段と、隊列走行に移行する場合に、自車情報及び周辺車両情報に基づいて、隊列の全体の消費エネルギーが小さくなるように隊列を編成する隊列編成処理手段と、編成された隊列で隊列走行を行う隊列走行処理手段と、隊列走行が開始された後に、隊列の全体の効率に基づいて隊列の編成を判定し、現在の編成を維持するべきかどうかを判断する編成判定処理手段とを有する。隊列の全体の効率に基づいて隊列の編成が判定されるので、隊列の全体の消費エネルギーを小さくすることができる。
(もっと読む)
車両用走行支援システム

【課題】走行中の車両のユーザが、道路前方に停止している車両に対して対処することのできる情報を与えることができる車両用走行支援システムの提供。
【解決手段】センタ23からの情報送信要求により、自車Aの前方所定距離以内に位置する他車両は、センタ23に対してウィンカー情報および位置情報を送信する。自車Aはセンタ23から送信された前方に位置する車両のウィンカー情報および位置情報と、自車位置情報および経路情報に基づき、走行経路の前方において自車Aと同一車線上に進路変更予定の車両Bが位置していることを検出した場合、スピーカ11を使用してユーザに車両Bの存在を通知して注意を促す。
(もっと読む)
車載警報装置及び車両用警報方法
【課題】自車両以外の物体と他の物体とが接近する状況に遭遇する可能性に応じて物体に対して警報を出力する車載警報装置を提供する。
【解決手段】
自車両周辺に存在する他車両の位置その他の他車両に関する物体情報を取得する物体情報取得手段10と、取得した物体情報に基づいて、第1他車両が第2他車両と接近する状況に遭遇する可能性が高い状況として予め定義された物体情報に関する警戒パターンを参照し、他車両が接近等の状況に遭遇する可能性に係る関与度を算出する関与度算出手段20と、算出された関与度に応じて、その関与度が算出された他車両に関する警報を作成する警報作成手段30と、作成された警報を他車両に対して出力する出力手段40とを備える。
有する車載警報装置。
(もっと読む)
停車案内装置
【課題】車両が交差点で停止しようとしたときに、右左折車両の走行エリア内に自車が進入しないように停止位置を案内する。
【解決手段】停車案内装置1は、制御装置3、位置検出器4、地図データ入力器5、表示装置8、スピーカー9及び車載カメラ15などを有して構成されている。制御装置3は、自車走行時に自車が停止することが予測される交差点があるか否かを判断し、自車が停止することが予測される交差点が有ると判断されたときには、当該交差点における右左折車両の大きさ情報を取得し、取得した右左折車両の大きさ情報と当該交差点形態とから当該右左折車両の走行エリアを推測し、推定した走行エリアの境界より手前の位置で走行停止するように案内する。
(もっと読む)
運転支援装置及び警告情報伝達装置
【課題】合図の誤りによって発生する事故を防止することができるようにする。
【解決手段】情報受信部34によって、自車両の周辺に存在する他車両から、他車両が提示しているウィンカ合図を示すウィンカ合図情報と、他車両に搭載されたカーナビゲーション装置によって案内されている経路を示す経路案内情報及び他車両の経路履歴を示す経路履歴情報とを含む他車両情報を受信する。そして、第1行動予測部38によって、受信したウィンカ合図情報に基づいて、他車両の行動を予測し、第2行動予測部40によって、受信した経路案内情報及び経路履歴情報に基づいて、他車両の行動を予測する。そして、ミスマッチ判定部42によって、第1行動予測部38によって予測された行動と、第2行動予測部40によって予測された行動とがミスマッチであると判定されたときに、出力部44によって警告メッセージを音声出力する。
(もっと読む)
マルチ画面表示装置及びそのプログラム
【課題】ドライバの運転状況に応じて確認する頻度が高いものをドライバの近い表示位置としてその視認性をよくすること。
【解決手段】車両の出発地から目的地との間のルートを探索するに必要な要件を設定するナビゲーション検索制御画面、地図上の車両の位置を表示するナビゲーション地図画面、夜間に道路上のものを赤外線で認識するナイトビジョン画面、車両の後方の確認を行うバックガイドモニタ画面、車両の直角方向の認識を行うブラインドコーナーモニタ画面、自動車電話のハンズフリー送受信画面のうち、2以上の画面を同時に表示するワイド画面30からなるマルチ表示画面と、車両運転状態検出部で検出した車両運転状態に応じてワイド画面30からなるマルチ表示画面で表示する画面を選択し、かつ、車両運転状態に応じてワイド画面30からなる「画面1」31、「画面2」32、「画面3」33のマルチ表示画面での表示を決定する。
(もっと読む)
車両警告システム
【課題】一般車両が路面軌道車両に対する危険を回避可能な車両警告システムの提供。
【解決手段】運転車両の車載装置1は、気象情報センタ19より周辺地域の積雪量データを受信する。また、車載装置1は路面車両情報センタ20から路面軌道車両24の位置データを受信する。車載装置1の制御装置2は位置検出器3によって検出された自車両の位置から、自車両の走行地域周辺において所定量以上の積雪が検出され、かつ自車両が路面軌道が敷設された道路を走行していることが検出された場合、運転者に対して路面軌道が敷設された道路を走行していることを警告し、さらに、軌道車両24が自車両に接近していることが検出された時に、運転者に対して軌道車両24の接近を警告する。
(もっと読む)
路車間通信システム及び車載器
【課題】センター装置から路側無線装置を介して提供されたコンテンツ情報が自車の走行車線用のコンテンツ情報か否かを、車載器側で判断して再生する路車間通信システムを提供する。
【解決手段】路車間通信システムにおいて、複数の路側無線装置に、それぞれを識別するための識別情報を付与する。センター装置は、路側無線装置を介して、当該路側無線装置の識別情報を第1識別情報として送信するとともに、当該路側無線装置が設置されている車線を走行していれば到達するまでに経由していると推測される路側無線装置の識別情報を第2識別情報として送信する。車載器は、センター装置から送信された前記第1識別情報を記憶し、次回、センター装置から送信された第2識別情報に、記憶した第1識別情報が含まれる場合に、当該第2識別情報とともに送信されたコンテンツ情報を再生する。
(もっと読む)
車両用防眩装置
【課題】車両の運転者に特段の操作を強いることなく太陽からの直射光が運転の妨げとなることを防止し、さらに、車両の進行方向が変化する場合であっても、上記直射光が運転の妨げとならないようにする。
【解決手段】光透過率を制御可能な調光ガラスをマトリクス状に配列して成る調光ガラスアレイで車両のフロントガラスを覆い、前記車両の進行方向に対する光源の方向を検出する光源方向検出手段と、前記車両の進行方向を予測する進行方向予測手段と、前記進行方向予測手段により予測された進行方向と前記光源方向検出手段により検出された光源の方向とに基づいて、前記調光ガラスアレイにおいて前記光源からの光を遮断するべき領域を予測し、その領域における調光ガラスの光透過率を低下させる制御を行う制御手段とを有する車両用防眩装置を前記車両に搭載する。
(もっと読む)
注意喚起システム及びプログラム
【課題】前方車両が二輪車である場合に、運転者の注意を十分に喚起することができるようにする。
【解決手段】現在地検出部と、自車の前方を監視する前方監視部と、前方監視部による監視結果に基づいて、自車の前方を走行している二輪車が検出されたかどうかを判断する車両判定処理手段と、二輪車が検出された場合、自車位置より前方の道路情報を取得する道路情報取得処理手段と、道路情報に基づいて路面状態を判定する路面状態判定処理手段と、路面状態の判定結果に基づいて二輪車の走行状態を判定する前方車両走行状態判定処理手段と、二輪車の走行状態の判定結果に基づいて警告を行う警告処理手段とを有する。二輪車が検出された場合、路面状態の判定結果に基づいて警告が行われるので、運転者の注意を十分に喚起することができる。
(もっと読む)
情報提示システム
【課題】認識率の高い情報提示システムを提供する。
【解決手段】車両に搭載され、ロボット100を駆動させる駆動部120と、車両の状態に応じて発生した情報を出力する出力部130とを有するロボット100と、車両の状態に応じて発生した情報を取得する情報取得部210と、取得した情報に呼応して、駆動部120によりロボット100を駆動させ、ロボット100に情報を提示する旨を乗員に通知する動作を行わせる動作制御部220と、この情報を提示する旨を乗員に通知する動作の後、ロボット100に情報の提示動作を行わせる情報提示部230とを有するロボット制御装置200とを有する。
(もっと読む)
車両走行制御装置
【課題】 主要道路を走行中にナビゲーション装置などの自車両が走行環境を取得する手段によって主要道路を退出しようとしたと判断された場合に、運転者に与える違和感を少なくすることができる車両走行制御装置を提供する。
【解決手段】 走行制御ECU1は、目標車速設定部12で設定された車速に基づいて、ACC制御部13によって車速を制御する。加速意思取得部11では、運転者の加速意思を取得している。目標車速設定部12において、車両が高速道路の本線を走行中であるにも係わらず、誤って退出路を走行していると判定することがある。この場合、目標車速を低く設定して加速を抑制するが、このときに加速意思取得部11が運転者の加速意思を取得した場合には、目標車速を低くせず、加速の抑制をキャンセルする。
(もっと読む)
死角車両検出システム、路側装置、車載装置および死角車両検出方法
【課題】死角車両を高精度に検出すること。
【解決手段】路側装置の通信経由情報生成部が、所定の端末装置を搭載した車両の位置およびサイズを含んだ情報である通信経由情報を生成し、路側装置の画像経由情報生成部が、道路の交通状況を撮像するカメラによる画像を画像解析することによって検出された車両の位置およびサイズを含んだ情報である画像経由情報を生成し、路側装置の車両配置情報生成部が、通信経由情報と画像経由情報とを照合して各車両に対応する車両配置情報を生成する際に、路側装置の信頼度付加処理部が、各車両配置情報に対して情報精度の高低を表す信頼度を付加し、車載装置の死角車両検出部が、信頼度が所定値以下である場合に、車両配置情報に含まれるサイズを変更して死角車両を検出するように死角車両検出システムを構成する。
(もっと読む)
車両運転支援システム、運転支援装置、車両及び車両運転支援方法
【課題】車線変更の走行制御又は情報提供を行うことにより、自車両が安全に交差点を通過することができる車両運転支援システム、運転支援装置、車両及び車両運転支援方法を提供する。
【解決手段】運転支援装置は、自車両の位置、前方車両又は後方車両との車間距離などを測位しつつ、通信装置20から受信した車両情報を探索して車両情報で示される車両の中から自車両、前方車両及び後方車両を特定する。運転支援装置は、自車両及び前方車両それぞれの交差点までの距離及び速度並びに信号情報に基づいて、自車両及び前方車両が交差点の手前に停止する停止条件及び交差点に進入する進入条件により決定される特定の状態にあるか否かを判定し、判定結果に基づいて、自車両の車線を変更するか否かを判定する。
(もっと読む)
車輌用防眩装置
【課題】自車と対向車が選択する眩惑防止方式を互いに調停する仕組みが不要な車輌用防眩装置を提供する。
【解決手段】車輌の前方に設けられ、第1の特性を有する第1照射光と第2の特性を有する第2照射光とを切替可能に照射する前照灯410と、前照灯の第1照射光と第2照射光との切替制御を行う前照灯制御部400と、フロントガラス面上に設けられ、第1照射光を吸収する第1光吸収特性を有する状態と第2照射光を吸収する第2光吸収特性を有する状態を切り替えることができる調光シート510と、調光シートの第1光吸収特性と第2光吸収特性との切替制御を行う調光シート制御部500と、車輌の走行位置及び走行方向に係る情報、車輌が走行中の交差点番号又は道路番号を取得するナビゲーション部300とを有し、ナビゲーション部によって取得された情報に応じて前照灯制御部と調光シート制御部における切替制御を行うことを特徴とする。
(もっと読む)
路車間通信システム、路車間通信方法、路車間通信プログラム、および、プログラム記録媒体
【課題】カーナビゲーションシステムを効率的に使い、信頼性が高い路車間通信サービスを実現する路車間通信システムを提供する。
【解決手段】車載のカーナビゲーションシステム1用の地図情報として、路側通信機が設置された路車間通信可能エリアか否かを示す情報と該路側通信機の通信方式を示す通信方式情報とを有し、カーナビゲーションシステム1で、自車が路車間通信可能エリアの手前のあらかじめ定めた距離まで接近したことを検知した際に、車載システム3は該路車間通信エリアに設置された路側通信機の通信方式を前記地図情報から取得し(シーケンスA3)、路車間通信機2に、当該通信方式を用いたスタンバイ状態に設定する(シーケンスA4)。前記路側通信機からの電波を受信した際に、路車間通信機2は、スタンバイ状態から脱し、自車の事故防止用の警告情報を含む前記路側通信機からの情報を受信し、車載システムに送信する(シーケンスA5)。
(もっと読む)
車載通信装置
【課題】路上機や他の車両から取得した情報の検索時間を短縮する車載通信装置を提供
【解決手段】地図データに含まれている全ての道路(以下、全道路という)を、2次元空間での位置(例えば、緯度・経度)に基づき、複数階層有する木構造を用いて、複数の領域に分割する。例えば、図(a)に示すように、「全道路」を、所定分割距離SD1(図(b)を参照)で複数の「道路」に分割して「道路1」,「道路2」,・・・,「道路k」とする(kは正の整数)。更に、分割された各「道路」について、図(b)に示すように、車線毎に分割して、「レーン1」,「レーン2」,・・・,「レーンm」とする。更に、分割された各「レーン」について、図(b)に示すように、道路の長さ方向に沿って所定分割距離SD2(例えば10m)で複数の「ゾーン」に分割して、「ゾーン1」,「ゾーン2」,・・・,「ゾーンn」とする(nは正の整数)。
(もっと読む)
ナビゲーション装置
【課題】音声報知が他の音声報知と重なったときに何れか一方の音声報知の出力ポイントを変更しあるいは何れか一方の音声報知を別途報知する。
【解決手段】ナビゲーション装置1は、音声を出力するスピーカ20と、各音声報知毎に音声報知の標準開始ポイントである第1開始ポイントと、該第1開始ポイントで出力しようとする音声報知が他の音声報知と重複したときに開始ポイントを変更できる変更範囲を記憶した第2記憶手段(RAM23)を備え、前記制御手段は前記第1開始ポイントで出力しようとする音声報知が、他の開始ポイントで出力できる音声報知と重複したときに該他の音声報知の開始ポイントを前記変更範囲内で重複しないポイントに変更する。
(もっと読む)
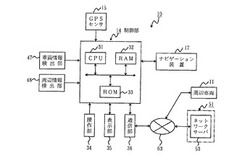
車載ナビゲーション装置及びプログラム
【課題】側方映像に切り替える地点を登録する操作を省くことが可能な車載ナビゲーション装置及びプログラムに関する。
【解決手段】車載ナビゲーション装置1には、車両の前側方を撮像する撮像装置2及びGPS受信用のアンテナ3が接続されている。処理部14は、操作受付部22により切替操作を受け付けた場合、表示部20に表示されている道路地図画面を、撮像装置2から映像入力部21を介して与えられた側方映像に切り替えると共に、アンテナ3を介してGPS受信部11が受信した信号及びジャイロセンサ12からの信号により処理部14が検出した車両の走行位置を切替登録地点としてDRAM19に記憶する。また、処理部14は、車両の走行中に検出した走行位置がDRAM19に記憶されている切替登録地点から所定範囲内にある場合に、表示部20に表示されている道路地図画面を側方映像に切り替える。
(もっと読む)
画像表示制御装置及び画像表示制御システム
【課題】要安全確認対象物を容易に認識できるとともに、自車両と要安全確認対象物との位置関係を容易に把握できる画像表示制御装置及び画像表示制御システムを提供すること。
【解決手段】画像表示制御装置5では、ステップ100にて、電子カメラ11で撮影された画像の撮像データを取り込む。続くステップ110では、レーダ13により検出された対象物との距離のデータ(測距データ)を取り込む。続くステップ120では、車速センサ15や操舵角センサ17から得られた自車の車両情報を取り込む。続くステップ130では、自車線走行領域の算出を行う。続くステップ140では、歩行者や車両等の障害物の検出を行う。続くステップ150では、ディスプレイ3に表示する表示画像を算出する。続くステップ160では、前記ステップ150にて算出された画像データに基づく画像を、ディスプレイ3に表示する。
(もっと読む)
141 - 160 / 331
[ Back to top ]