
Fターム[2F129GG10]の内容
航行(Navigation) (246,646) | 他の航行体搭載機器との連携 (8,583) | 安全/走行支援 (3,448) | 制御・警報発生の検出対象 (1,391) | 他車両検知 (331)
Fターム[2F129GG10]に分類される特許
21 - 40 / 331
交通情報提供システム
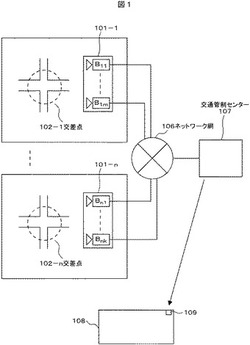
【課題】信号機が設置されていないような、特に見通しが悪い交差点では交通事故を回避し難い。
【解決手段】交差点に設置しているネットワークカメラから出力される映像信号を交通管制センターに送信し、交通管制センターにてその映像から人物や自動車の検知情報をデータベース化し、交差点付近の自動車にあるカーナビゲーションに検知データおよび事故データを送信することにより、交差点付近の状況を運転手に認識させることで交通事故回避の可能性を高めた交通情報提供システム。
(もっと読む)
ナビゲーションシステム

【課題】自車両の前方を走行する他の車両を追い越す際、自車両及び前方の他車両に対して、追い越しのための適切な通知を行うことのできるナビゲーションシステムを提供する。
【解決手段】自車両の現在位置を検出する現在位置検出手段17と、現在位置及び地図情報に基づき、追い越し車線、登坂車線又は譲り車線である特定車線が自車両の走行方向前方の所定距離以内に接近したことを検出する特定車線接近検出手段14と、自車両に対して前記特定車線を案内する特定車線案内手段26,27と、自車両の走行方向前方に存在する他車両に追い越し通知を行う追い越し通知手段28と、を備えるナビゲーションシステムにおいて、特定車線接近検出手段14が特定車線の接近を検出したとき、特定車線案内手段26,27に前記特定車線を案内させる制御を行う一方、追い越し通知手段28による前記他車両への追い越し通知を禁止する制御を行う制御手段14を備える。
(もっと読む)
可動物予測装置及びプログラム
【課題】適切な精度で、可動物の将来の位置及び移動状態を予測することができると共に、計算量の増大を抑制することができるようにする。
【解決手段】行動変化度算出部44は、検出された可動物の各々について、可動物の種類及び位置に基づいて、可動物の行動変化度を算出する。予測方法選択部46は、可動物の各々について、行動変化度が閾値未満である場合、可動物の種類、位置、及び移動状態に基づいて、可動物単位で、可動物の将来の位置及び移動状態を線形予測し、算出された行動変化度が閾値以上である場合、可動物を表わす複数の可動物粒子の各々について将来の位置及び移動状態を予測することにより、可動物の将来の位置及び移動状態を予測する。
(もっと読む)
自律走行制御装置
【課題】緊急時に車両の状態に応じてより迅速かつ的確な走行制御を行うことが可能な自律走行制御装置を提供する。
【解決手段】自律走行ECU1では、車両の周囲の状況(相対位置情報)に応じて走行計画を設定すると共に、他のECUからの異常情報に基づいて車両を緊急停止させる必要があると判定した場合には、制御系統の異常部位以外の特定部位である使用可能部位と予め設定された緊急停止モードとから一意に決まる制御指針に従って、車両を停止させるための走行計画を再設定する。しかも、車両における乗員および危険物の有無の少なくとも一方の情報に基づいて緊急停止モードを選択し、車内優先モードまたは車外優先モードのいずれかを走行計画の再設定に反映させることにより、緊急時の車内の状況に応じて、車両と車両の周囲とのいずれかの安全を的確に重視した制御を行うことが可能となる。
(もっと読む)
カーブ進入制御装置
【課題】実際に走行する分岐先道路に適した制動警報を行うことにより、ドライバへの違和感を軽減する。
【解決手段】高速道路の分岐路を進む際のカーブ進入制御装置であって、この装置は、自車前方の本線道路の分岐である分岐情報及び自車位置情報と、走行中の道路を撮像する撮像手段により検出した走行車線情報に基づいて、前方分岐における走行予定車線を推定する走行予定車線推定手段(S30)と、走行予定車線推定手段により推定された走行予定車線に基づいて、制動警報を作動させるか否かを判断する制動警報判断手段(S110)とを備える。
(もっと読む)
運転支援装置
【課題】車両の運転操作を行う過程で積み重ねられるドライバの心理に即した運転支援を実現することのできる運転支援装置を提供する。
【解決手段】車両の運転域における各交通情報下での操作態様を検出しつつ、それら検出された操作態様に関する情報を交通情報毎に関連付けして学習する。そして、前回の減速地点で行われた減速操作と次の減速地点に関連付けして学習されている情報とに基づいて次に実行すべき運転支援態様を決定する。
(もっと読む)
運転支援装置および運転支援システム
【課題】方向指示器の操作を行い忘れているドライバーの車両の周囲の車両に、より確実に右左折や進路変更を知らせることを可能にする。
【解決手段】車両Bのナビゲーション装置1は、車両Bにおけるウインカー操作忘れを検知した場合に、ウインカー操作忘れが発生していることを示す情報を少なくとも含む通知情報を車両B外に送信する。そして、車両Aのナビゲーション装置1は、車両Bから受信した通知情報をもとに、ウインカー操作忘れが発生している車両が存在していることを少なくとも示す提示を表示装置19や音声出力装置20に行わせる。
(もっと読む)
前方環境認識装置、およびそれを備えた車両誘導システム
【課題】ゲート手前に車両が並んでいる場合であっても、自車両前方の物標情報を検出して、ゲートを認識することが可能な前方環境認識装置、およびそれを備えた車両誘導システムを提供する。
【解決手段】検出された物標Pの情報に基づいて、物標Pの平面分布形状Hを算出する。前方環境認識装置1は、平面分布形状Hから、自車両側へ突出する山型分布形状Y1〜Y3を判別し、判別された山型分布形状Y1〜Y3に対応する位置に障害物C1〜C3が存在するゲートG1〜G3が有ると認識する。これにより、ゲートG1〜G3の手前に他車両C1〜C3などの障害物が存在する場合であっても、自車両前方の物標Pの情報を検出して、ゲートG1〜G3を認識することができる。
(もっと読む)
物体検出装置
【課題】簡易な方法で、自車両に搭載された検出装置の検出方向軸のズレの補正を自車両の走路環境に応じて行うことのできる物体検出装置を提供する。
【解決手段】物体検出装置は、上記車両の車両情報を取得する車両情報取得手段と、上記車両情報を用いて上記車両の進行方向を算出する進行方向算出手段と、上記進行方向と一致する方向に上記検出手段の検出方向を補正する補正手段と、道路情報および上記車両の位置情報を含むナビゲーション情報を取得するナビゲーション情報取得手段と、当該ナビゲーション情報に基づき上記車両の位置が予め定められた条件を満たす場合、上記補正手段が行う上記補正を禁止する禁止手段とを備える。
(もっと読む)
ナビゲーション装置
【課題】歩行者と自動車との接触事故を未然に防ぐための注意を喚起するナビゲーション装置を提供する。
【解決手段】交差地点特定部は、車両用ネットワークを構成する道路リンクおよび道路ノードと、歩道に対応する歩行者用ネットワークを構成する歩道リンクおよび歩道ノードとを重畳させる(ステップS41)。次に、歩道リンクと、道路リンクとが交差すると思われる候補地点において、両リンクの高さが一致する場合には、交差地点特定部は、歩道ネットワークと道路ネットワークとが交差していると判定して、その候補地点を交差地点として確定させる(ステップS45)。交差地点では、携帯端末の注意喚起部が、車両との接触事故を回避するための注意喚起のメッセージを報知する。
(もっと読む)
走行支援装置
【課題】状況に応じて演算負荷の低減やドライバーとの協調を適切に行うことが可能な走行支援装置を提供する。
【解決手段】運動量算出部40は、自車周囲の物体mについての総リスク値Rを最小とする目的地への最適経路に自車を誘導する最適運動量算出モード又は総リスク値Rが現在よりも減少する修正経路に自車を誘導するための修正運動量算出モードにより自車の走行を支援する。最適運動量算出モードと修正運動量算出モードとでは、リスクに対して自車を誘導するロジックが異なる。最適運動量算出モードは総リスク値Rを最小とする最適経路に誘導するためドライバーへの負担が少ない。一方、修正運動量算出モードは総リスク値Rが現在より減少する修正経路に誘導するだけの処理なため演算負荷が低減される。そのため、状況に応じて演算負荷の低減やドライバーとの協調を適切に行うことが可能となる。
(もっと読む)
車両情報表示装置
【課題】 交差点等で右折をしようとしている対向車に対して、自車は停止して対向車を先に右折させようとしていることを対向車に通知する車両情報表示装置を提供する。
【解決手段】 目的地までの経路を案内するとともに、自車が直進する経路の地点を自車と反対方向に進行する対向車が右折しうる交差地点を抽出するナビゲーション手段を用いて、交差地点の手前のある地点で検出した速度情報を規定値と比較することによって交差地点で自車が停止すると判定すると、対向車に対して右折を促すように前方表示を行う。
(もっと読む)
車両制御装置
【課題】自車両周囲に車々間通信できない他車両が存在して、協調走行制御の安全性に影響を与えないようにする。
【解決手段】車々間通信できない他車両のうち、協調走行制御の制御内容に影響を与える他車両を検出し、協調走行制御の制御内容を変更する。車々間通信により前方車両と所定の車間距離を保持しつつ追従走行する制御中は、前方車両との車間距離を長く設定する。
(もっと読む)
車両制御装置
【課題】車々間通信できない他車両のうち、協調走行制御の制御内容に影響を与える他車両を検出し、画面上でその他車両を強調して表示する。
【解決手段】車々間通信機能を有していない他車両であって、自車両の協調走行制御の制御内容を変更する可能性のある制御対象車両を特定し、その車両のアイコンを地図画面上で強調表示する。
(もっと読む)
ナビゲーション装置
【課題】ドライバの運転負担を低減することができるナビゲーション装置を提供する。
【解決手段】ナビゲーション装置1は、車両に搭載され、道路情報を利用して目的地へのルートを案内するものであって、車両10のドライバの運転操作を支援する運転操作支援装置6における支援内容及び利用状況の少なくとも一方に応じて、目的地へのルートを検索するECU5を備えている。このようにナビゲーション装置1によれば、運転操作支援装置6の支援内容及び利用状況の少なくとも一方を考慮してルートを検索することができる。
(もっと読む)
前方確認アシスト装置および前方画像への切り替え方法
【課題】ナビゲーション画像等から前方画像への表示切り替えが交差点進入時以外の無用なタイミングでは行われないようにすることが可能な「前方確認アシスト装置および前方画像への切り替え方法」を提供する。
【解決手段】車両の速度や減速加速度ではなく、ブレーキの踏み込み強度および踏み込み積算時間に基づいて、車載カメラ102により撮影された前方画像への表示の切り替えを制御することにより、渋滞時のノロノロ運転等により単に車両の速度が所定速度以下になったり、一時的に減速されたりしただけの状況では、前方画像への表示の切り替えは行われず、ブレーキの踏み込み強度や踏み込み積算時間により表わされるブレーキの踏み込み状況から、運転者が車両を停止させようとしていると推測されるときにだけ、ディスプレイ104の表示が前方画像へと切り替わるようにする。
(もっと読む)
走行支援システム及び方法
【課題】変化する道路環境に略リアルタイムに対応して推奨ルート・挙動等を提供する。
【解決手段】クライアントシステム2は、測位部11と、基準情報を格納する基準情報格納部12と、走行履歴取得部13と、挙動履歴取得部14と、画像認識部15と、ルート生成部16と、挙動生成図17とを備え、サーバシステム3は、複数の車両の走行履歴情報を格納する走行履歴データベース21と、複数の車両の挙動履歴情報を格納する挙動履歴データベース22と、複数の車両の画像認識情報を格納する画像認識データベース23と、前記データベース21〜23に格納された情報に基づいて各クライアントシステム2の前記基準情報を更新する更新情報を送信する基準情報更新部24とを備える。
(もっと読む)
携帯端末および安全運転支援システム
【課題】車道を横断しようとしている歩行者を予測して車両に事前に通知する手段を提供する。
【解決手段】歩行者が所持する携帯端末2に、車両に搭載された車々間通信装置1への送信を行う送信部23と、所持者による目的地の入力を受付ける入力部26と、歩行時の加速度を検出する加速度センサ29と、位置測定のための位置情報を受信するGPS受信部28とを設け、GPS受信部28により受信した位置情報を基に、所持者の現在位置を認識し、認識した所持者の現在位置から目的地までの間に設定した移動経路によって、所持者の歩行行動を制限し、加速度センサ29からの歩行時の加速度のピッチ間隔の変化によって横断前の準備行動を検出し、準備行動を検出したときに、所持者の現在位置から進行方向前方の移動経路の形状に基づいて、所持者が車道を横断するか否かを予測し、所持者による横断を予測したときに、送信部23によって車々間通信装置1へ、横断可能性を有する歩行者の存在を通知する。
(もっと読む)
案内装置、案内方法、及び案内プログラム
【課題】センサの検出範囲外から自車両に接近する他車両が存在する可能性を考慮した案内を行うことができる、案内装置、案内方法、及び案内プログラムを提供すること。
【解決手段】案内装置50は、自車両に搭載される案内装置50であって、検出範囲内の他車両を検出する他車両検出部51と、他車両検出部51によって他車両が検出されない場合に、検出範囲外に存在し、且つ対象車線に存在する仮想車両の車速を推定する車速推定部52aと、自車両の車速と車速推定部52aが推定した仮想車両の車速とに基づき、対象車線に関する案内情報を出力する出力部52bとを備える。
(もっと読む)
車両用画像表示装置及び車両用画像表示方法
【課題】カメラ画像を用いて障害物の検出を行い、死角が発生する可能性が高いときのみ、カメラ画像に切り替えて表示する車両用画像表示装置を提供する。
【解決手段】車両周囲の映像を夫々撮影する複数のカメラを含む撮像部と、複数のカメラのうち車両の進行先の映像を撮影する少なくとも2つのカメラで撮影した画像を比較し、比較画像の一致度に応じて障害物の有無を判定する障害物判定部と、車両の情報及び車両の進行を案内するナビゲーション情報を生成する車両情報生成部と、障害物判定部による障害物の判定結果と、車両情報生成部から入手した車両の進行先の状況を示す情報をもとに、ナビゲーション画像又は進行先周辺の映像を撮影したカメラ画像を切り替えて出力する表示切替部と、表示切替部から出力された画像を表示可能な表示部と、を具備する。
(もっと読む)
21 - 40 / 331
[ Back to top ]