
Fターム[2G017BA15]の内容
磁気的変量の測定 (8,145) | 測定システムの回路要素 (1,384) | データ処理回路 (289)
Fターム[2G017BA15]に分類される特許
1 - 20 / 289
方位誤差補償装置、方位誤差補償方法、方位誤差補償プログラム、誤差角度補償装置、3軸磁気センサ及びセンサモジュール
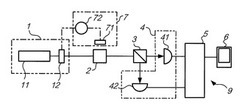
磁場測定装置
【課題】測定すべき磁場方向以外の方向に存在する外乱磁場の影響を抑制して磁場を測定する。
【解決手段】磁場測定装置9は、照射部1、ガスセル2、計測部(偏光分離器3、受光部4、信号処理回路5)、追従機構7を具備する。ガスセル2は、内部に気体原子を封入する。追従機構7の調節部72は、検知部71が検知した外乱磁場方向と、変換部12を通ってガスセル2に照射される照射光に含まれる直線偏光の電場の振動方向とが合うように、変換部12を動かして調節する。計測部は、照射部1により照射され、気体原子を透過した照射光の偏光面の回転角度を計測する。
(もっと読む)
三次元磁界センサおよびその製造方法

【課題】構成が簡単で、製造コストを低減できる三次元磁界センサを実現する。
【解決手段】三次元磁界センサ1は、平面である素子配置面40aを有する基板40と、基板40の素子配置面40a側に配置されて基板40と一体化されたMR素子10,20,30を備えている。MR素子10は、磁化固定層11、非磁性層12および自由層13を有し、MR素子20は、磁化固定層21、非磁性層22および自由層23を有し、MR素子30は、磁化固定層31、非磁性層32および自由層33を有している。自由層13,23,33の磁化の方向は、外部磁界Hの方向に応じて変化する。磁化固定層11の磁化の方向は、素子配置面40aに平行なX方向に固定されている。磁化固定層21の磁化の方向は、素子配置面40aに平行であってX方向に直交するY方向に固定されている。磁化固定層31の磁化の方向は、素子配置面40aに垂直なZ方向に固定されている。
(もっと読む)
磁気センサ
【課題】磁気を検出するホールセンサと、前記ホールセンサの駆動や信号処理を行うためのICをリードフレームのダイパッド上に別々にダイボンドにより配置し、かつ1つのパッケージ内に封入されている磁気センサにおいて、急激な磁束密度の変化によりリードフレームに発生する渦電流の影響を抑え、電流センサに必要な高速応答性を備えた磁気センサを提供すること。
【解決手段】磁気を検出するホールセンサと、前記ホールセンサの駆動や信号処理を行うためのICをリードフレームのダイパッド上に別々にダイボンドにより配置し、かつ1つのパッケージ内に封入されている磁気センサにおいて、前記リードフレームのダイパッドが互いに電気的に絶縁された2つ以上の複数の金属片から構成されているようにする。
(もっと読む)
磁場計測装置
【課題】計測すべき磁場方向以外の方向に存在する外乱の磁場の影響を抑制して磁場を計測する。
【解決手段】磁場計測装置9は、照射部1、ガスセル2、計測手段(偏光分離器3、受光部4、信号処理回路5)、磁気シールド7を具備する。磁気シールド7は、両端に開口部を有する筒状に形成されている。ガスセル2は、内部に気体原子が封入され、磁気シールド7の中空の領域に配置される。照射手段1は、電場の振動方向が、磁気シールド7の軸の方向に合うように調整された直線偏光を含む照射光を、磁気シールド7の軸に垂直な方向に沿ってガスセル2に封入された気体原子に照射する。計測手段は、照射手段1により照射され、気体原子を透過した照射光の偏光面の回転角度を計測する。
(もっと読む)
磁気センサー装置及び磁気計測装置
【課題】複数のセルを配列して検体からの磁場を計測する際の装置構成を小型化しつつ、磁場の測定精度を向上させる。
【解決手段】磁気センサー装置は、アルカリ金属原子を収容した複数のセル(161)と、直線偏光成分を有する入射光を出射する出射部(10,12)と、入射光の偏光面の角度を保持した状態で複数のセルが配置された範囲の大きさに相当する光束径の入射光を出射させる第1光学系を有する第1光学機構(14)と、複数のセルに各々対応して設けられ、第1光学機構から入射した入射光の偏光面の角度を保持した状態で入射時の光束径より小さい光束径の入射光をセルに出射させる第2光学系を有する第2光学機構(15)と、各セルを透過した入射光を当該セルに向けて反射させる反射部(162)と、反射されて各セルを透過して第2光学機構と第1光学機構とを通過した反射光を第1偏光成分と第2偏光成分とに分離し、各成分の受光量を示す受光情報を出力する受光部(18,19,20)とを備える。
(もっと読む)
磁気測定データ校正装置及び方位角計測装置
【課題】環境オフセットの変動に対する追従性を向上させる磁気測定データ校正装置及び方位角計測装置を提供する。
【解決手段】本発明は、互いに直交する3つの測定軸を有し、測定軸方向の地磁気を測定する軸センサからなる磁気センサから出力される測定軸毎の磁気測定データのオフセットを求め、磁気測定データを補正する装置であり、測定された磁気測定データの測定軸毎の磁気データと、前回のオフセットとの差分から誤差関数を求める誤差関数計算部と、誤差関数及び前回の共分散行列からオフセット残差を算出するオフセット残差計算部と、前回の磁気測定データの測定時のオフセットに対し、オフセット残差を加算し、新たなオフセットを算出するオフセット更新部と、測定された磁気測定データを用い、以前に測定された磁気測定データを母集団とする磁気測定データの共分散行列を更新する共分散行列更新部とを備える。
(もっと読む)
地磁気測定装置
【課題】ソフトアイアン効果が生じている場合に正確な地磁気の方向を算出する
【解決手段】地磁気測定装置は、3次元磁気センサ60から順次出力される複数の磁気データq1〜qNの示す座標を近傍に有する、第1楕円面、第2楕円面、及び第3楕円面の形状を表す、第1楕円面係数行列Dxx、第2楕円面係数行列Dyy、及び第3楕円面係数行列Dzzを生成する初期楕円面生成部310と、第1楕円面の中心点cxx、第2楕円面の中心点cyy、及び第3楕円面の中心点czzの相互間の距離が、第1閾値Δc以下であることを判定する初期楕円面中心点判定部322と、第1楕円面係数行列Dxx、第2楕円面係数行列Dyy、及び第3楕円面係数行列Dzzに基づいて初期楕円面補正行列T0を生成するとともに、中心点cxx、中心点cyy、及び中心点czzに基づいて初期中心点cE0を生成する初期補正値生成部330とを備える。
(もっと読む)
地磁気測定装置、地磁気測定方法、及び地磁気測定プログラム
【課題】ソフトアイアン効果が生じている場合に正確な地磁気の方向を算出する
【解決手段】機器1は、内部磁界Bi及び着磁磁界Bmを発生させる部品と、3次元磁気センサ60と、CPU10とを備える。CPU10は、3次元磁気センサ60から順次出力される複数の磁気データq1〜qNの示す座標が、最適中心点cEOPを中心とする楕円面近傍に分布すると仮定して、当該楕円面上の座標を、最適中心点cEOPを中心とする球面上の座標へと変換する最適楕円面補正行列TOPを、対称行列である変数行列Tの各成分を変数とする楕円面最適化関数fEL(T,c)を最小化することにより算出する。そして、磁気データqiの示す座標を、最適楕円面補正行列TOP及び最適中心点cEOPの示す座標を用いて、変換後磁気データsiの示す座標に変換し、変換後磁気データsiの示す座標と最適中心点cEOPの示す座標に基づいて地磁気Bgの向きを算出する。
(もっと読む)
磁界検出方法
【課題】精度の高い磁界検出方法を提供する。
【解決手段】
トンネル磁気抵抗効果素子10を用いて外部磁界を検出する磁界検出方法が提供される。磁界検出方法は、トンネル磁気抵抗効果素子10の自由層15の磁化方向を変化させるバイアス磁界Hbと外部磁界Hexとを同時に、もしくはバイアス磁界Hbと外部磁界Hexとを個別にトンネル磁気抵抗効果素子10に印加したときの電気特性を測定するステップと、バイアス磁界Hbおよび外部磁界Hexに応じて測定されたトンネル磁気抵抗効果素子10の電気特性に基づいて外部磁界を算出するステップとを含む。
(もっと読む)
磁気センサ装置およびコネクタ機構
【課題】コストの低減を図ることが可能になるとともに、磁気センサ装置に加わる振動の周波数や加速度が大きくても回路基板に実装される電子部品と回路基板との間の断線を防止することが可能な磁気センサ装置を提供する。
【解決手段】磁気抵抗素子を備える磁気センサ装置は、磁気抵抗素子から出力される信号を処理する回路基板17と、磁気センサ装置が取り付けられる上位装置に回路基板17を電気的に接続するためのコネクタ19と、回路基板17が内部に配置される筺体20とを備えている。コネクタ19は、回路基板17の一端に直接固定されるとともに、筺体20に保持され、回路基板17は、固定部材25によって筺体20に固定されている。回路基板17では、コネクタ19と固定部材25との間に電子部品18、27〜29が実装されている。
(もっと読む)
磁界検出装置、及び環境磁界のキャンセル方法
【課題】環境磁界をキャンセルするための補償磁界を極めて小さなエネルギーで生成できる磁気検出装置を提供する。
【解決手段】磁界センサ2と、磁界センサ2が検出する環境磁界をキャンセルする補償磁界を生成して磁界センサ2に印加する磁界補償手段10とを備える磁界検出装置1であって、磁界補償手段10が、磁界センサ2のx軸方向に補償磁界を印加するための永久磁石3a,3b、その再着磁用のコイル6a,6bおよび再着磁用の電流を供給する電源部11、y軸方向に補償磁界を印加するための永久磁石4a,4b、その再着磁用のコイル6a,6b、および再着磁用の電流を供給する電源部12、z軸方向に補償磁界を印加するための永久磁石5a,5b、その再着磁用のコイル7a,7b、および再着磁用の電流を供給する電源部13と、再着磁用の各電流を磁界センサ2の検出した環境磁界に基づき制御する制御部9とを備えている。
(もっと読む)
地磁気測定装置、オフセット決定方法、及びオフセット決定プログラム
【課題】外部磁界の影響の程度を評価してオフセット値の採否を決定する。
【解決手段】機器1は、内部磁界Biを発生させる部品と、3次元磁気センサ60と、CPU10とを備える。CPU10は、3次元磁気センサ60から順次出力される複数の磁気データqiで示される座標の分布の3次元的な広がりの程度を示す分散評価値を算出し、複数の磁気データqiで示される座標が内部磁界Biの成分を示す座標を中心点とする球面Sの近傍に確率的に分布すると仮定して、球面Sの中心点x0を算出し、複数の磁気データqiで示される座標が、球面S2を歪ませた形状の立体SDの表面近傍に確率的に分布すると仮定して算出される立体SDと球面S2との形状の相違の程度を示す歪評価値gD(E)が、歪許容値δ0以下である場合に、中心点x0を3次元磁気センサ60のオフセットとして採用する。
(もっと読む)
交流透磁率を測定する装置及びその測定方法
【課題】本発明は交流透磁率を測定する装置及びその測定方法である。
【解決手段】この交流透磁率装置は交流透磁率コイルセットや信号受信ユニット、信号処理ユニットをすくなくてもそれぞれ一つずつ含まれている。この装置によって、異なっている交流周波数の磁場において、測定物の交流透磁率信号を測定可能である。また信号処理ユニットを通じて、交流透磁率の強度と位相差及び/又は交流透磁率の実部と虚部の変化値がわかるようになる。
(もっと読む)
有線式鉄道車両内磁界測定装置
【課題】 鉄道車両内の磁界測定を精確に行うことができる、有線式鉄道車両内磁界測定装置を提供する。
【解決手段】 有線式鉄道車両内磁界測定装置において、磁気センサ1Aが取り付けられたプローブ1と、このプローブ1が取り付けられたアーム2Aの回転角の角度情報及び位置データを計測する位置検出器2と、前記磁気センサ1Aからの磁界測定データと前記位置検出器2からの角度情報及び位置データとをインターフェース装置3を介して取り込むパーソナルコンピュータ(PC)4とを具備する。
(もっと読む)
磁気センサ及びその感度測定方法
【課題】外部の感度測定用磁界発生源を用いることなく磁気センサの各軸方向の感度を測定する機能を有する磁気センサ及びその感度測定方法を提供すること。
【解決手段】感度測定装置では、感磁部(31)による検出された磁束密度は、切換部(32)によって各軸の磁界強度情報が抽出され、増幅部(33)を介して、感度演算部(34)に入力される。感度演算部(34)は、感磁部(31)からの各軸に関する磁界強度情報に基づいて感度を演算する。感度演算部は、感磁部(31)からの磁束密度を各軸の磁気成分に分解する軸成分分解部(34a)と、軸成分分解部(34a)からの磁界強度の各軸成分を基準値と比較して感度を判定する感度判定部(34b)と、感度判定部(34b)からの感度情報に基づいて感度補正を行う感度補正部(34c)とを備えている。センサ診断部(39)は、感度情報に基づいて磁気センサの感度良否を自己診断し、自己感度補正(調整)をする。
(もっと読む)
移動体位置推定検出装置及び移動体位置推定検出のプログラム
【課題】高精度に船舶等の移動体における位置等を推定検出することができる装置等を提供する。
【解決手段】移動体に係る磁界を磁気信号として直交3軸方向の各成分で検知する磁気検知器1と、磁気検知器1がそれぞれ同時に検知した信号を磁気データとして記録するデータ収集器3と、移動体の形状に合わせて設定した複数のモデルに対し、データ収集器3に記録された磁気データを代入して、残差を用いた最小自乗法により算出したパラメータの値に基づいて位置推定値を算出する位置演算手段4A、4Bと、位置推定値の中から、移動体の位置を決定する位置検出手段4Cとを備えるものである。
(もっと読む)
磁気データ処理装置、磁気データ処理方法及び磁気データ処理プログラム。
【課題】磁気データ測定装置のオフセットを更新する。
【解決手段】機器1は、内部磁界を発生させる部品と3次元磁気センサ60とCPU10とを備える。CPU10は、3次元磁気センサ60から順次出力される複数の磁気データに基づいて、部品の発生する磁界の成分を表す3軸の座標であるオフセットを、旧オフセットから新オフセットに更新する。新オフセットは、複数の磁気データで示される座標を表面近傍に有する球面と磁気データで示される座標との誤差を第1誤差、複数の磁気データの分散を表す共分散行列の最小固有値に対応する正規化された固有ベクトルと旧オフセットから見た球面の中心の座標を示す更新ベクトルとの内積に第1係数を乗じた第2誤差、及び共分散行列の中間固有値に対応する正規化された固有ベクトルと更新ベクトルとの内積に第2係数を乗じた第3誤差を要素とする誤差ベクトルの大きさを最小化する球面の中心の座標として算出される。
(もっと読む)
位置検出装置及び撮像装置
【課題】誘導磁気の影響を抑えて高精度に位置を検出する。
【解決手段】本発明に係る位置検出ユニット100は、磁気コイル106cを有し、磁力により駆動力を発生させるボイスコイルモータ106と、ボイスコイルモータ106により駆動されるレンズ移動枠102と、レンズ移動枠102の位置を検出するMRセンサ110と、磁気コイル106cに流れる電流に基づいて、MRセンサ110の出力を補正する補正部(検出アンプ122、減算部126)と、を備える。
(もっと読む)
磁気特性推定装置、磁気特性推定方法、及びコンピュータプログラム
【課題】 それぞれの結晶粒の構造が単磁区構造ではない場合であっても、軟磁性材料からなる鋼板の集合組織から、当該鋼板の磁気特性を正確に計算できるようにする。
【解決手段】 各結晶粒Aの<100>方向と磁界Hの方向とのなす最小角度αminを導出する。次に、<100>方向と磁界Hの方向とのなす最小角度αminを用いて、計算対象の鋼板に与えられる磁界Hの磁化容易軸方向の成分H<100>を導出し、それに対応する「磁化容易軸方向の磁束密度B<100>」を、「計算対象の鋼板の単結晶の<100>方向におけるB−H曲線」から導出する。次に、導出した「磁化容易軸方向の磁束密度B<100>」と、<100>方向と磁界Hの方向とのなす最小角度αminを用いて、磁界Hの方向の磁束密度B<100>Hを、各結晶粒Aの「磁界Hの方向の磁束密度B<100>H(M,I)」として導出する。
(もっと読む)
1 - 20 / 289
[ Back to top ]