
Fターム[2H011BA31]の内容
焦点調節 (10,117) | 焦点検出(測距)方式 (3,703) | 像鮮鋭度検出方式 (2,037)
Fターム[2H011BA31]の下位に属するFターム
ディップ効果(CdS)を利用するもの (2)
センサーアレイを用いるもの (229)
撮像管を用いるもの
機械的走査によるもの (14)
光学的フーリエ変換を利用するもの (1)
光軸方向に異なる複数の位置で検出するもの (94)
Fターム[2H011BA31]に分類される特許
101 - 120 / 1,697
撮像装置およびその制御方法
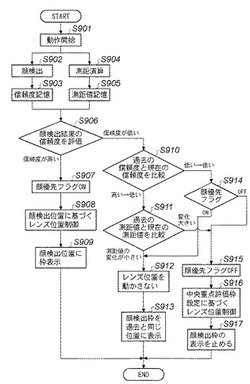
【課題】動画の撮影に際して焦点を合わせるべき対象を見失っても、オートフォーカス制御を安定的に行う。
【解決手段】顔検出結果の信頼度が閾値以上であれば、フラグをONとして顔検出位置に基づきAF評価枠を設定する。また、AF評価枠に対応する枠表示を撮像画像に対して行う。顔検出結果の信頼度が低ければ、過去と現在の信頼度が比較される。比較の結果、過去の信頼度が閾値以上であれば、過去と現在の測距結果が比較される。差分が小さければ、フォーカスレンズ位置を動かさないように制御され、枠表示も変更しない。差分が大きければ、フラグをOFFとし、AF評価枠を中央に固定すると共に、枠表示を止める。過去と現在の信頼度の比較の結果、過去の信頼度が低ければ、フラグのON/OFFが判定され、ONであればレンズ位置固定、枠表示変更無しとされ、OFFであれば、AF評価枠が中央に固定的とされ、枠表示が停止される。
(もっと読む)
カメラ本体

【課題】撮像素子により焦点検出を行う場合であっても、より高速な焦点検出を行うこと。
【解決手段】連続的に取得した複数の画像から、フォーカスエリアに含まれる第1形状と、前記第1形状と重複する第2形状とを決定する形状決定手段と、撮影位置と前記第1形状の位置と前記第2形状の位置との相対関係により生じる、前記第1形状および前記第2形状の画像間における二次元的な形状変化に基づいて、前記第1形状および前記第2形状の遠近を判定するとともに、前記第1形状と前記第2形状とのエッジ幅を比較する判定比較手段と、前記判定比較手段における前記遠近の判定結果及び前記エッジ幅の比較結果に基づいてデフォーカス方向を決定する方向決定手段と、前記方向決定手段によって決定されたデフォーカス方向にフォーカスレンズを駆動させて前記第1形状に合焦させるよう前記交換レンズを制御する制御手段と、を有する。
(もっと読む)
撮像装置
【課題】 スタートシーンのように被写体が急激に動き出すシーンにおいても、被写体に対して焦点調節を追従可能にする。
【解決手段】 撮影レンズの焦点状態を検出する焦点検出手段101と、検出された焦点状態に応じて撮影レンズの焦点調節を行う焦点調節手段107と、焦点検出手段により焦点検出される際の像面位置の変化量である像面変化量が予め設定された閾値未満の場合に焦点調節手段の焦点調節動作を行わせる捕捉判定手段106と、予め決められた条件を満たすことによって被写体および撮像装置が静止状態にある場合に、捕捉判定手段の閾値を予め設定された値よりも大きくする閾値変更手段105とを有する。
(もっと読む)
撮像装置及び撮像装置の制御方法
【課題】高輝度領域が存在している画像が撮影される場合にも、合焦制御の精度が低下することを抑制する。
【解決手段】撮像素子によって時系列に撮像されたN(N≧2)枚の画像のうち最大輝度が設定値以上の画像がM(M<N)枚以上か否かに基づいて、N枚の画像に高輝度領域が連続的に存在しているか否かを繰り返し判定し(100,102)、位相差検出方式で合焦位置を検出し、位相差検出方式で合焦可能か否か判定する(106,108)。位相差検出方式で合焦可能であれば、検出された合焦位置付近までレンズを駆動した後、画像に高輝度領域が存在していれば位相差検出方式で、存在していなければコントラスト検出方式で合焦制御を行う(108〜116)。位相差検出方式で合焦不可であれば、コントラスト検出方式で合焦位置検出と合焦制御を行い(118,120)、画像に高輝度領域が存在していれば位相差検出方式で合焦可能か再判定を行う(122,124)。
(もっと読む)
焦点検出装置及びその制御方法並びに焦点検出装置を有する撮像装置
【課題】 位相差検出方式とコントラスト評価方式の自動焦点検出が可能な焦点検出装置及びその制御方法において、位相差検出方式による焦点検出結果の補正値を精度よく取得可能とする。
【解決手段】 コントラスト評価方式によって合焦位置の探索を行い、フォーカスレンズが合焦位置を通り過ぎたことを検出したらフォーカスレンズを停止させ、停止位置でデフォーカス量を求める。このデフォーカス量から、合焦位置と停止位置との差に対応するデフォーカス量を差し引くことにより、デフォーカス量の補正値を算出する。
(もっと読む)
撮像装置及びその制御方法
【課題】 主被写体の選択が可能な撮像装置において、利便性のよい合焦表示を実現する。
【解決手段】 撮影した画像中の被写体を検出し、検出した被写体から、主被写体を選択する。検出手段が検出した被写体に応じた焦点検出領域を設定し、設定した焦点検出領域で焦点検出を行う。焦点検出結果を表す合焦表示を行う際、焦点検出領域のうち、主被写体に対応する焦点検出領域についての焦点検出結果と、被写界深度内に含まれる主被写体以外の被写体に対応する焦点検出領域についての焦点検出結果とを異ならせて表示する。
(もっと読む)
オートフォーカス装置及び撮影装置
【課題】焦点評価値に影響を与えるような操作が行われた場合であっても、操作感を損な
うことなく、適正な合焦位置を検出する。
【解決手段】AF動作を実行する走査が行われた時点(t2)でAF動作が開始され、A
F動作を停止する操作が行われた時点(t3)で、AF動作は中断される。AF動作の中
断中に、所定の割り込みが発生した場合に、その後にAF動作の実行が指示された時点(
t4)で、AF動作を所定の開始位置からやり直す。そのような割り込みが発生しなかっ
た場合には、時点(t4)でAF動作を中断時点での位置からその続きを実行する。
(もっと読む)
画像処理装置、画像処理方法、画像処理プログラム及び撮像装置
【課題】被写体が移動していても、実際の顔部に顔部を検出するための領域を合わせること。
【解決手段】撮像時刻の異なる連続した複数の画像データのそれぞれから被写体の顔部に対応する第1の画像領域を検出する顔検出部と、前記顔検出部により検出される前記第1の画像領域から前記顔部内の少なくとも1つの器官に対応する第2の画像領域を検出する器官検出部と、前記顔検出部により検出される前記複数の画像データ上での前記顔部の移動位置に追従して前記器官検出部により検出される前記少なくとも1つの器官の前記画像データ上での画像位置を補正する顔部補正部とを具備する画像処理装置である。
(もっと読む)
撮像装置、撮像方法及びプログラム
【課題】装置の個体毎に異なる、撮影光学系の撮影画面内の位置に応じて生じる合焦距離のずれを考慮してマルチAF機能を正確に実行する。
【解決手段】合焦位置を移動させるフォーカスレンズを含む光学レンズユニット11と、光学レンズユニット11から得る被写体像を撮像面に照射して画像信号を出力するCMOSイメージセンサ12と、撮像面に照射される被写体像中の複数の位置毎に、等距離にある被写体像撮影時の基準位置での合焦状態との合焦誤差を予め記憶したプログラムメモリ23と、撮像面に照射される被写体像中の複数の位置の各合焦位置を判定し、プログラムメモリ23の記憶内容に基づいて判定結果を補正し、補正した判定結果に基づいて光学レンズユニット11のフォーカスレンズの移動位置を決定するCPU21とを備える。
(もっと読む)
撮像装置及びプログラム
【課題】 シャッターチャンスの看過やタイムラグを生じさせることなくピント精度のよい画像を撮影できる撮像装置及びプログラムの提供。
【解決手段】 デジタルカメラは、シャッターキーが半押しされてから、全押しされるまでの間は(Q2、Q3)、フォーカスレンズを低速で移動させて合焦位置を検出し(Q4)、フォーカスレンズが合焦位置に達する以前にユーザによりシャッターキーが全押しされた場合は(ステップQ3、Q5)、フォーカスレンズをシャッターキーが半押しされているときよりも速い速度で移動させて(Q6)、合焦位置を検出する。これにより、フォーカスレンズが合焦位置に達する以前にユーザによりシャッターキーが全押しされた場合でも、デジタルカメラは、撮影までのタイムラグを少なくして合焦することができる。
(もっと読む)
撮像装置
【課題】 被写体追尾の画像解析に時間がかかり、精度を維持したまま同コマ内で自動測距などに用いることが難しかった。
【解決手段】 一眼レフ撮像装置において、ミラーダウン中に第1の低精度の被写体探索を行い同コマ内で自動測距に用い、その後のミラーアップを含む状態で第2の高精度の被写体探索を行い、第1と第2の探索結果からどちらかを判断して次コマ以降の自動測距などに用いることを特徴とする撮像装置。
(もっと読む)
撮影装置、撮影方法及びプログラム
【課題】立体撮影を行う際に、容易にブレの少ない3D画像を撮影可能にする。
【解決手段】撮影装置は、撮影した画像信号の信号処理を行う画像処理部13と、画像処理部13の入力画像の動きベクトルを算出する動きベクトル算出部18と、入力画像の動きベクトルに基づいて撮影可否を判断する撮影可否判断部19と、立体撮影における一枚目画像及び二枚目画像の撮影制御を行うカメラ・レンズ制御部15と、一枚目画像の撮影時の一枚目画像情報を取得し、一枚目画像情報に基づいて撮影装置の静止状態検出用の閾値T1を算出して決定する閾値算出部21とを備え、撮影可否判断部19は、一枚目画像撮影後の移動量が所定の視差が得られる二枚目撮影場所の撮影可能位置に相当するものであって、動きベクトルが閾値T1以下である場合に、撮影装置の静止状態を判断して二枚目画像を撮影可能であると判断する。
(もっと読む)
画像再生制御装置
【構成】撮像モードの下で顔連写モードが選択されると、CPU26は、顔に合焦した画像データを含む複数フレームの画像データを共通の視野に対応して取得する。取得された複数フレームの画像データは、顔連写グループファイルとして記録媒体42に記録される。再生モードの下で顔連写グループファイルが指定されると、CPU26は、顔連写グループファイルに収められた複数フレームの画像データのいずれか1つを再生し、再生画像に現れた顔を指定するタッチ操作を受け付ける。CPU26は、タッチ操作によって指定された顔に合焦した画像を指定グループファイルに収められた複数フレームの画像データの中から検索し、再生すべき画像データを検索結果に応じて異なる画像データに更新する。
【効果】画像再生に関する操作性が向上する。
(もっと読む)
電子カメラ、画像表示装置、プログラム及び記録媒体
【課題】 本発明は、装置が大型化せず、簡単な構成でサイズ情報を容易に取得し、そのサイズ情報を記録用画像に関連付ける手段を提供する。
【解決手段】 電子カメラは、撮像部と、認識部と、選択部と、第1算出部と、第2算出部と、記録処理部とを備える。撮像部は、撮影光学系を介して被写体の像を撮像する。認識部は、撮像部が生成する第1画像から主要被写体を認識する。選択部は、主要被写体に応じた複数の測定点を選択する。第1算出部は、選択部が選択した測定点ごとに、各々の測定点に対し距離を算出する。第2算出部は、第1算出部が算出した各々の距離に応じて主要被写体の大きさを示すサイズ情報を算出する。記録処理部は、撮像部が生成する記録用の第2画像とサイズ情報とを関連付けてメモリに記録する。
(もっと読む)
距離測定装置及びカメラ
【課題】距離を正確かつ安全に測定することができる距離測定装置及びカメラを提供する。
【解決手段】オートフォーカス機能によって取得された画像データの画像処理を行って顔を検出し、顔以外の部分にレーザ光を照射して人Mまでの距離を測定する。正確な距離情報が得られたフォーカスエリアFAと他のフォーカスエリアFAとの差分からすべてのフォーカスエリアFAにある物体までの距離を算出し、ファインダ枠50内の全部の物体までの距離情報を取得する。
(もっと読む)
撮像装置、撮像方法、及びプログラム
【課題】被写体が平面画像の撮像に適している場合は平面画像の撮像を行い、立体画像の撮像に適している場合は立体画像の撮像を行う。
【解決手段】2つの対物系から入射するそれぞれの物体光により形成される立体画像を撮像する立体撮像部111と、1つの対物系から入射する物体光により形成される平面画像を撮像する平面撮像部112と、少なくとも1つの対物系から入射する物体光により形成される画像に対して所定の画像処理を行うことで画像における被写体の特徴である凹凸情報を抽出する凹凸情報抽出部114と、凹凸情報が所定の条件を満たす場合に立体撮像部111が撮像した立体画像を記憶部117に記録し、所定の条件を満たさない場合に、平面撮像部112が撮像した平面画像を記憶部117に記録する画像記録部116とを備える。
(もっと読む)
撮像装置
【課題】撮像素子の移動ストロークを大きくし、かつ、撮像素子の移動中の像面の倒れを抑えることができる撮像装置を提供する。
【解決手段】撮像装置が、被写体からの光束が結像される撮像素子1と、撮像素子1を保持し、複数の支点に支持され、光軸に沿った方向に撓み変形する板ばね2と、撮像装置本体に片端支持され、圧電素子への電圧印加により駆動して、撮像素子1を光軸Lに沿って前方または後方へ移動させるバイモルフとを備える。
(もっと読む)
撮像装置
【課題】撮影方向に奥行きを有する複数の人物を撮影する際に、全ての人物にピントが合った画像を撮影可能にする。
【解決手段】撮像装置は、撮影光学系を介して被写体からの光束を受光して画像信号を出力する撮像素子と、被写体からの光束を制限する絞りと、画像信号に基づいて被写界に含まれた所定の特徴を有する複数の特定被写体を検出する検出手段と、検出された複数の特定被写体までの距離を被写体距離としてそれぞれ算出し、最至近の特定被写体から最遠方の特定被写体までの距離を算出する第1算出手段と、算出された距離のほぼ中央の位置が被写界深度の中心となるように、絞りの絞り値と、撮影光学系の合焦位置とを算出する第2算出手段と、算出された前記絞り値となるように絞りを駆動する絞り制御手段と、算出された合焦位置に前記撮影光学系を駆動する焦点調節手段とを備える。
(もっと読む)
赤外線カメラ及び焦点位置補正方法
【課題】空気の屈折率が変化する環境で使用する場合であっても、高精度に焦点位置を検出して高精細な赤外線画像を取得することができる赤外線カメラ及び焦点位置補正方法の提供。
【解決手段】被写体から放射される赤外線を集光するレンズと、前記レンズによって集光された赤外線を検出して映像信号を出力するカメラと、前記レンズの温度を検出する温度センサと、前記レンズを光軸方向に移動させて焦点位置を調整する焦点位置調整部と、制御部と、を備える赤外線カメラにおいて、前記制御部は、予め記憶した、前記レンズの温度と焦点位置とを対応付けるテーブルを参照し、前記温度センサが検出した温度に基づいて焦点距離を補正した後、前記レンズを光軸方向に所定の範囲で移動させ、前記映像信号のコントラストが最大となる位置に焦点位置を再補正する制御を行う。
(もっと読む)
画像撮影装置における合焦位置探索方法、画像撮影装置
【課題】 立体撮影をする際の撮影を行うときのAF合焦までの時間短縮を実現する。
【解決手段】 被写体に対する至近側および無限遠側に探索範囲内を移動可能に構成された第1のフォーカスレンズと、被写体に対する至近側および無限遠側に探索範囲内を移動可能に構成された第2のフォーカスレンズと、前記被写体に対して前記第1のフォーカスレンズおよび前記第2のフォーカスレンズを合焦させる際に、各フォーカスレンズの一方を前回の合焦位置から前記至近側に向けて所定の距離だけ移動させ、他方を前回の合焦位置から前記無限遠側に所定の距離だけ移動させて合焦状態であるかを確認し、また、各フォーカスレンズが前記探索範囲の限界に達した場合には移動方向を反転させ、各フォーカスレンズの一方が合焦状態にあることが確認された場合には、他方のフォーカスレンズを一方のフォーカスレンズのいずれかに移動させる制御手段とを有する。
(もっと読む)
101 - 120 / 1,697
[ Back to top ]