
Fターム[2H011BA31]の内容
焦点調節 (10,117) | 焦点検出(測距)方式 (3,703) | 像鮮鋭度検出方式 (2,037)
Fターム[2H011BA31]の下位に属するFターム
ディップ効果(CdS)を利用するもの (2)
センサーアレイを用いるもの (229)
撮像管を用いるもの
機械的走査によるもの (14)
光学的フーリエ変換を利用するもの (1)
光軸方向に異なる複数の位置で検出するもの (94)
Fターム[2H011BA31]に分類される特許
41 - 60 / 1,697
撮像装置及びその制御方法
【課題】スルー画像で撮影者が容易かつ高精度にフォーカス状態を確認することができ、かつ必要に応じて被写体の構図の確認が可能な撮像装置を提供する。
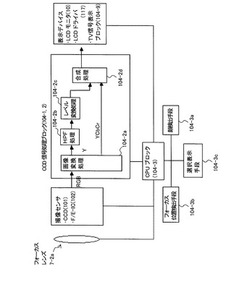
【解決手段】撮像センサと、前記撮像センサにより取得された画像データに基づいてスルー画像を表示する表示デバイスと、前記画像データ中の輝度(Y)データから高周波成分を抽出しエッジ信号データを出力するHPF処理部104−2bと、所定の閾値を用いて前記エッジ信号データを2値化処理するレベル変換処理部104−2cと、前記2値化エッジ信号データと、前記画像データ中の輝度(Y)データ及び色差(CbCr)データとを合成する合成処理部104−2dと、撮影条件と前記画像データから取得される情報に応じて、前記2値化エッジ信号データに基づいた表示形式と前記合成画像データに基づいた表示形式のいずれかの表示形式でスルー画像の表示を行うように制御するCPUブロック104−3と、を備える。
(もっと読む)
レンズ鏡筒

【課題】カメラ本体が静音となる駆動速度を直接指定する必要なく好適にフォーカシングレンズを駆動することが可能なレンズ鏡筒を提供する。
【解決手段】複数の制御モードを有し、設定されている制御モードに応じた駆動制御を駆動部に対して行う制御部と、フォーカシングレンズを所定の駆動速度で駆動するように指令する駆動信号と、制御部に複数の制御モードのいずれかを設定する制御モード設定信号とを受信する受信部と、駆動速度が上限速度を超えるか否かを判定する上限判定部と、制御部に上下限制御モードが設定されている場合に駆動速度が下限速度を下回るか否かを判定する下限判定部とを備え、制御部は、駆動速度が上限速度を超えると判定された場合には、上限速度以下の第1駆動速度で駆動されるように駆動部を制御し、駆動速度が下限速度を下回ると判定された場合には、下限速度以上の第2駆動速度で駆動されるように駆動部を制御するレンズ鏡筒。
(もっと読む)
画像処理装置及びカメラモジュール
【課題】的確なフォーカス動作、及び高い感度での合焦点の検出を可能とするための画像処理装置等を提供すること。
【解決手段】実施形態によれば、画像処理装置は、コントラスト算出部、足切り処理部37、コントラスト評価値算出部である積算部38、及びフォーカス制御部であるマイクロコントローラ39を有する。フォーカス制御部は、コントラスト評価値が増加するほうの向きへ撮像レンズ11を逐次駆動させる。フォーカス制御部は、コントラスト評価値が最大となる合焦点を検索する。フォーカス制御部は、足切り閾値を第1の値として合焦点を検索する。フォーカス制御部は、足切り閾値を第2の値とした場合のコントラスト評価値に応じた撮像レンズ11の駆動を実行させる。第2の値は、第1の値より小さい。フォーカス制御部は、足切り閾値を第2の値から第1の値とした場合のコントラスト評価値に応じた撮像レンズ11の駆動を実行させる。
(もっと読む)
レンズ鏡筒およびカメラボディ
【課題】画像を良好に撮影することができる撮像装置を提供する。
【解決手段】焦点調節光学系32を含む光学系と、光学系を通過する光束を制限する絞り34と、光学系の焦点状態に基づいて、焦点調節光学系32を光軸方向に駆動させる駆動部36と、光学系の焦点状態を検出する際に、光学系の絞り値を、画像を撮影する際の撮影絞り値から変化させることができる量である可変量を、撮影絞り値に応じて記憶している記憶部39と、可変量を、カメラボディ2に送信する送信部37と、を備えることを特徴とするレンズ鏡筒。
(もっと読む)
カメラ、カメラ制御プログラム及びカメラ制御方法
【課題】被写体に変化があった場合であっても、意図する被写体に焦点を自動調整する。
【解決手段】複数のピント枠に対してマルチAF処理を実行し(S104)、複数のピント枠のいずれかを選択し、この選択したピント枠の色を変化させ、この選択したピント枠内の画像が合焦するように、フォーカスレンズを駆動する(S105)。撮影者が意図するピント位置が他のピント枠内の被写体であった場合には、一度シャッターキーを解除し、2秒以内に再度シャッターキーを判押しする。すると、S107の判断がYESとなって、S101に戻った後、S101の判断及びS102の判断が共にYESとなり、S102からS103に進み、前回までの選択ピント枠、つまり前回までにS105で選択されたピント枠を削除し(S103)、この削除したピント枠を除く、残存したピント枠に対して、前記マルチAFを実行する(S104)。
(もっと読む)
撮像システム
【課題】1つの撮像素子を用いて立体画像を撮影する場合でも、より効果的な立体画像を撮影することができる撮像システムを提供する。
【解決手段】撮影レンズにより結像された被写体の像を撮像する撮像装置を含む撮像システムであって、主被写体を選択する被写体選択部と、単位画素あたりに2つ以上の光電変換部を有する撮像素子と、主被写体か否かに応じて、それぞれの単位画素の光電変換部を選択する光電変換部選択部と、選択された光電変換部からの信号をもとに視差を有する2つの画像信号を生成する生成部とを有する。
(もっと読む)
焦点検出装置および撮像装置
【課題】構図変更や被写体の移動に伴い異なる被写体に対応する信号が加算された場合でも、焦点検出演算の信頼性低下を防ぐ。
【解決手段】焦点検出装置は、複数の撮像画素と複数対の焦点検出画素とが配列された撮像素子と、焦点検出信号で焦点調節する第1焦点調節部と、撮像信号で焦点調節する第2焦点調節部と、所定周期毎に同一被写体かを判定する同一被写体判定部と、第1および第2焦点調節部の一方により焦点調節させる焦点調節制御部とを備え、第1焦点調節部は所定回数の焦点検出信号から加算値を算出する加算部と、加算値が閾値を超えるかを判定する加算値判定部とを有し、加算値が閾値を超えかつ同一被写体の場合は加算値に基づき焦点調節し、加算値が閾値を超えかつ非同一被写体の場合は同一被写体判定部の判定結果の取得以降に出力された焦点検出信号の加算値に基づき焦点調節し、第2焦点調節部は加算値が閾値を超えない場合に焦点調節する。
(もっと読む)
電子カメラ
【構成】カメラ筐体の前面に設けられたリングは、角度範囲AR1およびAR2を跨いで回転する。主電源は、角度範囲AR1におけるリングの回転を参照してオン/オフされ、ズームレンズ12は角度範囲AR2におけるリングの回転に伴って移動する。主電源はまた、リングの角度が角度範囲AR2に留まる期間を測定する電源オフタイマPTM1のタイムアウトに応答してオフされる。メインCPU36は、角度範囲AR2におけるリングの回転を参照してフォーカストラッキング処理を実行し、イメージャ18から出力された生画像データに基づいて簡易AF処理を実行する。メインCPU36はまた、フォーカストラッキング処理に関連して電源オフタイマPTM1をオフする処理を簡易AF処理に遅れて実行する。
【効果】操作性を高めることができる。
(もっと読む)
撮像装置、撮像装置の合焦制御方法及びコンピュータプログラム
【課題】複眼撮影装置において、レンズにおける焦点距離の機械的・電気的な経時変化が生じている場合、又は焦点距離が動的に変化するズームレンズを撮像部が備えている場合においても、同一被写体に良好に合焦させる。
【解決手段】フォーカスレンズを備え、並置した2つの撮像部それぞれにより取得した各画像の鮮鋭度を、画像毎に定めた算出領域に含まれる画像のコントラスト値より、それぞれ算出する鮮鋭度算出部と、算出した各々の鮮鋭度が最大となるように各撮像部が備えるフォーカスレンズの位置を制御する制御部とを備える撮像装置において、各撮像部がそれぞれ取得した2つの画像の視差を算出する視差算出部と、該視差算出部により算出した視差を基に、一方の画像の前記算出領域を補正する補正部とをさらに備える。
(もっと読む)
撮像装置及びフォーカス制御方法
【課題】高精度のフォーカス制御が可能である撮像装置及びフォーカス制御方法等を提供すること。
【解決手段】撮像装置は、複数色の画素が配列される撮像素子103と、所定の画素数で構成される加算単位において、その加算単位に含まれる画素の画素信号に対して所定の重み付けを行って加算し、複数の加算画像を取得する加算画像取得部180と、複数の加算画像を平均した平均画像を生成する平均画像生成部123と、複数の加算画像の各加算画像と平均画像との差分である複数の差分画像を生成する差分画像生成部121と、複数の差分画像のうちの少なくとも1つの差分画像に基づいて、フォーカス評価値を算出するフォーカス評価値算出部と、フォーカス評価値に基づいてフォーカス制御を行うフォーカス制御部と、を含む。
(もっと読む)
カメラシステム、カメラ本体、交換レンズユニット、フォーカス制御方法、およびプログラム。
【課題】変倍動作時に変倍動作の速度によらず良好に合焦状態を保つことができるカメラシステムを提供する。
【解決手段】カメラシステム1において、制御部(140,240)は、焦点距離の変化速度および焦点距離に基づいて、所定時間後に被写体距離が所定量だけ大きくなる、または、小さくなるフォーカスレンズ(230)の光軸方向の位置をフォーカスレンズ(230)の移動目標位置として算出する。制御部(140,240)が所定時間後にフォーカスレンズ(230)を移動目標位置に移動可能と判断した場合、フォーカスレンズ駆動部(233)は、移動目標位置にフォーカスレンズ(230)を駆動させる。制御部(140,240)が所定時間後にフォーカスレンズ(230)を移動目標位置に移動不可能と判断した場合、制御部(140,240)は、トラッキングテーブルに基づいてフォーカスレンズ駆動部(233)を制御する。
(もっと読む)
顕微鏡制御装置、画像処理装置、顕微鏡装置およびプログラム
【課題】 被検物間の位置関係や被検物の移動状態を把握しやすい画像表示を実現する手段を提供する。
【解決手段】 顕微鏡制御装置の追尾処理部は、同じ被検物について撮像時刻が異なる複数の画像を撮像するときに、撮像部の撮像範囲を被検物の移動方向に追尾させる。情報取得部は、被検物を撮像したときの対物レンズの光軸と交差する方向の撮像座標の情報を、画像に対応付けて取得する。表示制御部は、表示装置の表示領域に撮像された時系列に従って画像のみを表示させるとともに、表示領域内で撮像座標が写像される位置に画像のみを表示させる。そして、追尾処理部は、被検物の分裂を検出したときに、分裂した被検物をそれぞれ追尾対象とする。なお、追尾処理部は、画像の撮像範囲を超えて被検物が拡張するときに、被検物が拡張する方向に画像の撮像ポイントを追加してもよい。
(もっと読む)
画像処理装置および画像処理方法
【課題】本発明は、複数のフォーカス状態で撮影される複数枚の画像と、複数のフォーカス状態の全てにおける合焦範囲を有する参照画像を用いて被写体距離を測定する場合に、被写体距離推定精度が低下することを課題とする。
【解決手段】上記の課題を解決するために、本発明では、n枚の画像のうちどの画像を被写体までの距離を計測するのに用いるかを選択する被写体距離計測画像選択部104を備える。被写体距離計測画像選択部104は参照画像と適切なペアとなるフォーカス状態の画像を選択し、被写体距離計測する。これにより、高精度に被写体距離を推定できる画像処理装置を提供する。
(もっと読む)
電子カメラ
【構成】イメージセンサ16は、シーンを表す画像を繰り返し出力する。CPU26は、登録操作に応答して相対位置情報を登録し、特定物体を形成する既定部位を表す既定部位画像をイメージセンサ16から出力された画像から探索する。CPU26はまた、イメージセンサ16から出力された画像に現れた特定物体像上の基準位置を探知された既定部位画像と登録された相対位置情報とに基づいて検出する。CPU26は、イメージセンサ16から出力された画像のうち検出された基準位置に存在する部分画像に基づいて撮像条件を調整する。
【効果】撮像条件の調整能力の向上。
(もっと読む)
撮像装置および距離情報取得方法
【課題】撮影画像内の各領域に対する被写体までの距離を適正に把握する。
【解決手段】測光スイッチS1がオンされると(S100)、レンズを駆動し複数の位置に焦点を合せながら各位置でのスルー画像をメモリに記憶する(S102)。AF処理における合焦位置にフォーカス(S104)する。レリーズスイッチS2がオンされると同合焦位置で主画像の撮影を行う。記憶された複数のスルー画像を用いて撮影画像の各領域毎に被写体までの距離情報を把握し、距離マップを作成する(S114)。距離マップに基づきマスクを作成し(S116)、被写体までの距離に応じたぼかし処理を施す(S118)。
(もっと読む)
撮像装置および撮像方法
【課題】撮像装置が、被写体である人物に対してより的確に、当該人物の移動指示などの通知を行えるようにする。
【解決手段】音声出力部132−1〜132−12の各々が、パラメトリックスピーカを具備して、撮像部150の撮像領域の一部に向けて音声を出力する。これにより、撮像領域に含まれる複数の人物のうち一部のみに通知を行うことや、人物が特定の領域に位置する場合にのみ通知を行うことができる。従って、携帯端末装置100は、通知対象の人物に対してのみ短いメッセージで通知を行うなど、より的確に通知を行うことができる。
(もっと読む)
撮像装置および距離情報取得方法
【課題】撮影画像各部における被写体までの距離を正確に把握し、距離に基づきぼかし処理を施す。
【解決手段】測光スイッチS1がオンされると(S100)、レンズを駆動し複数の位置に焦点を合せながら各位置でのスルー画像をメモリに記憶する(S102)。AF処理における合焦位置にフォーカス(S104)する。レリーズスイッチS2がオンされると同合焦位置で主画像の撮影を行う。記憶された複数のスルー画像の各々を手ブレに応じた大きさの領域に分割し、撮影画像における各領域に対応する被写体までの距離情報を把握し、距離マップを作成する(S114)。距離マップに基づきマスクを作成し(S116)、被写体までの距離に応じたぼかし処理を施す(S118)。
(もっと読む)
撮像装置
【課題】装置を大型化させることなく、位相差情報と画質の高い平面画像とを同時に取得可能な撮像装置を提供する。
【解決手段】RGB画像を生成するカラーの撮像素子と、被写体像を結像する撮像光学系と、撮影光束の光路上に配設されていて、第1の部分瞳を通過しようとするBの光を遮断しR、Gの光を通過させる第1の帯域制限と、第2の部分瞳を通過しようとするRの光を遮断しB、Gの光を通過させる第2の帯域制限と、を行う帯域制限フィルタと、R画像とB画像の位相差量を演算する距離演算部39と、演算された位相差量に基づき色ズレ補正を行い平面画像を生成する色画像生成部37と、距離演算部39による位相差量の演算と色画像生成部37による平面画像の生成とを並列して行わせるように制御する並列処理制御部46と、を備えた撮像装置。
(もっと読む)
撮像装置
【課題】高速のコントラストAFと高解像度の表示用画像の取得との両立を図ることができる撮像装置を提供する。
【解決手段】画素部21からの画像信号をアナログ記憶するメモリ部22を有する撮像素子と、第1フレーム周期で画素部21の第1画素領域から第1画像信号を読み出し、第1フレーム周期よりも長い第2フレーム周期で第1画素領域を含む画素部21の第2画素領域から第2画像信号を読み出して、メモリ部22に各記憶させる第1読出制御部24および第1読出処理部25と、メモリ部22から第1画像信号に係る焦点検出用画像信号と第2画像信号に係る表示用画像信号とを読み出す第2読出制御部26および第2読出処理部27と、焦点検出用画像信号に基づいてコントラスト焦点検出を行う焦点検出部と、表示用画像信号に基づいて画像表示を行う画像表示部と、を備えた撮像装置。
(もっと読む)
カメラシステム
【課題】コントラスト方式のオートフォーカス動作の精度を向上できる。
【解決手段】レンズコントローラー240は、カメラコントローラー140で生成された露光同期信号をカメラボディ100から取得し、露光同期信号の取得に応じて第1エンコーダ231、第2エンコーダ232及びカウンタ243からなる構成にフォーカスレンズ230の位置を検出させ、その検出されたフォーカスレンズ230の位置をカメラボディ100に通知する。カメラコントローラー140は、露光同期信号に基づいて、レンズコントローラー240から取得したフォーカスレンズ230又は機構部材の位置とAF評価値とを関連付け、該関連付けられた位置及びAF評価値に基づいて、カメラシステム1のオートフォーカス動作を制御する。
(もっと読む)
41 - 60 / 1,697
[ Back to top ]