
Fターム[3C007AS08]の内容
マニピュレータ、ロボット (46,145) | 用途 (2,903) | 組立 (282) | 電気/電子部品 (72)
Fターム[3C007AS08]に分類される特許
1 - 20 / 72
部品実装装置及び部品実装装置の製造方法
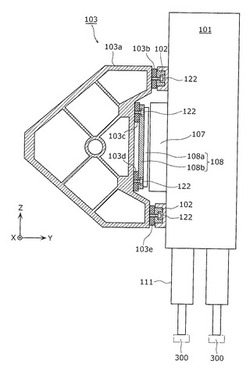
【課題】軽量化を図るとともに、ヘッドを精度良く位置決めすることができるXビームを備える部品実装装置を提供する。
【解決手段】ヘッド101をX軸方向に摺動自在に案内するX軸方向に延びて配置されるレール102と、レール102がY軸方向の一端部に取り付けられX軸方向に延びて配置される棒形状のXビーム103と、Xビーム103をY軸方向に摺動自在に案内するY軸方向に延びて配置されるYビーム104とを備える部品実装装置100であって、Xビーム103は、炭素繊維強化樹脂からなる本体部103aと、本体部103aとレール102とを接続する接続部103b、103eであって、Xビーム103のY軸方向の一端部に本体部103aに固定されて配置される金属製の接続部103b、103eとを有する。
(もっと読む)
直交型組付装置

【課題】大型化を招くことなく、ワークを移動させることのできる範囲を拡大可能な直交型組付装置を提供する。
【解決手段】レールとレールに沿って移動する移動部材からなるX軸、Y軸、Z軸ローダによって、ワークWを把持するワーク把持部16を移動させる。さらに、ワーク把持部16をワークWに接触して把持するマニュピレータ部16aと、このマニュピレータ部16aをX軸、Y軸、Z軸のうち少なくとも一つの軸方向へ移動させるマニュピレータ稼働部16bによって構成する。これにより、X軸、Y軸、Z軸ローダによってワークWを移動させることのできる範囲に加えて、マニュピレータ稼動部16bによる移動範囲を拡大できる。
(もっと読む)
半導体製造装置及び半導体装置の搬送方法
【課題】半導体装置の静電破壊の低減化を図る。
【解決手段】吸着パッド12における支持部12cの肉厚が吸着部12aの肉厚より薄く、かつ支持部12cが屈曲可能に形成されていることにより、吸着パッド12によってIC13を真空吸着した際に、支持部12cが屈曲することで、IC13と接触する吸着部12aの滑りを抑えてIC13の表面と吸着部12aとの間で起こる摩擦を低減することができ、IC13の表面での帯電を少なくすることができる。その結果、IC13の静電気放電による破壊を低減できる。
(もっと読む)
ツール交換機構及び調整方法
【課題】 ツールの重量やロボットの許容負荷能力に合わせて把持力や離脱力を簡単に調節できる小型のツール交換機構を提供することを課題とする。
【解決手段】 第1のツールチェンジャ2Aは係合凸部22を有する。係合凹部22は、等角度で配列された奇数本の調整孔22aと、調整孔22aにそれぞれ配置されたボールプランジャ25とを有する。第2のツールチェンジャ2Bは係合凸部22が挿入される係合凹部43を有する。係合凹部43は、ボールプランジャ25のボール25aが係合するV溝44aを有する。調整孔22aの各々のボールプランジャ25が配置されていない端部は、係合凸部22の外周面に開口している。
(もっと読む)
ロボット装置及び加工システム並びに加工品の製造方法
【課題】対象物への供給材の取り付け作業を自動で行なうことができるようにした、ロボット装置及び加工システム並びに加工品の製造方法を提供する。
【解決手段】胴部と、胴部に設置され複数の関節部を有する第1アームと、第1のアームと別体に胴部に設置され複数の関節部を有する第2アームと、第1アーム及び第2アームにそれぞれ設けられたハンド部と、を有するロボットにより複数種類のワーク部品のいずれかの種類のワーク部品については第1アーム及び第2アームのハンド部で同時に保持し、残る種類のワーク部品については第1アーム又は第2アームのハンド部で保持搬送する。
(もっと読む)
電子部品実装装置および電子部品実装方法
【課題】部品保持状態における吸着ノズルの安定した保持力の確保と、ノズル交換時の着脱容易性とを両立させることができる電子部品実装装置および電子部品実装方法を提供することを目的とする。
【解決手段】吸着ノズル26を着脱自在に保持するノズル保持部25に、吸着ノズル26に設けられた被クランプ部26fをクランプする複数のクランプアーム32およびこれらのクランプアーム32をクランプ方向に付勢する環状バネ部材33よりなるクランプ機構と、吸着ノズル26と連通する吸引開口部25bを真空吸引することによって発生する真空圧によりピストン29を内側方向に駆動して、補助アーム27をクランプアーム32に対して当接させて押圧力を作用させ、クランプ機構による吸着ノズル26の保持力を補強する保持力補強機構を備える。
(もっと読む)
組立検査装置及びこれを用いた組立処理装置
【課題】組付受部品に組付部品を組付けるに当たり、組立後の組付部品の組付け状態を容易且つ正確に検査する。
【解決手段】組付受部品1に組み付けられる組付部品2の一部に設けられ、中心位置Cから周囲に向かって濃度パターンPcが順次変化するように形成される単位パターン印13を予め決められた位置関係で四以上有する認識表示体12と、組付受部品1に組み付けられた組付部品2に対向配置されて前記認識表示体12を撮像する撮像具5と、この撮像具5にて撮像された認識表示体12の撮像情報を少なくとも用い、組付受部品1に組み付けられた後の組付部品2の位置及び姿勢に関する配置情報を認識する配置情報認識部6と、この配置情報認識部6にて認識された配置情報に基づいて良好な組付状態の組立であるか否かを検査する組立検査部7と、を備える。これを用いた組立処理装置も対象とする。
(もっと読む)
非接触型位置・姿勢測定方法及び非接触型位置・姿勢測定装置並びにこれを備えた半導体実装装置
【課題】測定対象物の位置・姿勢を直接測定して、精度の高い位置・姿勢の測定及び制御を可能にするとともに、測定対象物の位置・姿勢を非接触で測定することでモデル化を簡略にし、モデル化に起因した誤差を小さくすることを可能にした非接触型位置・姿勢測定方法及び非接触型位置・姿勢測定装置並びにこれを備えた半導体実装装置を提供する。
【解決手段】エンコーダ10の位置検出器15と距離計16、17が取り付けられた測定装置2と、測定対象物9に取り付けられたエンコーダ10のスケール11とを備えてなる非接触型位置・姿勢測定装置Bを用い、距離計16、17によって位置検出器15とスケール11の間隔及び平行度を測定し、間隔と平行度が一定となるように測定装置2のマニピュレータ13を制御し、測定装置2の位置情報と距離計16、17の計測値とエンコーダ10の計測値とを用いて測定対象物9の位置と姿勢を測定する。
(もっと読む)
部品吸着ヘッド
【課題】 小型化及び小径化を図ることによって高密度での配設を可能とし、しかも十分な吸着力を発揮することが可能な部品吸着ヘッドを提供する。
【解決手段】 先端に吸着ノズルを有すると共に当該吸着ノズルに連通する吸気通路を有する搬送シャフトと、この搬送シャフトが貫通すると共に当該搬送シャフトを周方向へは回転不能に且つ軸方向へは移動自在に保持すると共に、前記搬送シャフトの吸気通路に連通する吸引孔が設けられた円筒状ハウジングとを備え、前記ハウジングは吸着ノズル側の軸方向端部に回転軸受の装着部となる回転軸部を有し、この回転軸部の吸着ノズル側の先端にはキャップ部材が装着され、このキャップ部材には前記搬送シャフトの外周面に摺接するシール部材が内蔵されている。
(もっと読む)
位置姿勢計測装置、およびワーク搬送組立装置
【課題】
計測対象物の色や光沢に左右されることなく、計測対象物を撮像した画像における計測対象物と背景とのコントラストの差を簡易な構成で確実に大きくし、計測対象物の位置および姿勢を高精度に計測すること。
【解決手段】
計測対象物を撮像するカメラと、カメラ側から計測対象物に向けて発光する第1照明と、前記計測対象物を挟んで前記第1照明と反対側に設けられた第2照明と、計測対象物の輪郭より大きな開口部を備え、遮光部材によって第2照明を覆うカバーと、第1照明の点灯および消灯を制御する第1照明制御部と前記第2照明の点灯および消灯を制御する第2照明制御部と撮像画像に基づいて画像処理により、計測対象物の位置および姿勢を計測する。
(もっと読む)
多数のエリアアレイ型画像検出器を使用するヘッド搭載部品アライメント
【課題】ピック・アンド・プレイス機械のノズルに保持されたときに部品のオフセットおよび方向を検知するセンサを提供する。
【解決手段】センサは、複数の2次元カメラ300と、バックライト照明装置306と、コントローラ308とを含む。各カメラはピック・アンド・プレイス機械のノズルを含む視野を有する。バックライト照明装置は照明を複数の2次元カメラに向けるように構成されている。バックライト照明装置は複数の2次元カメラからノズルの反対側に位置決めされている。コントローラは複数の2次元カメラおよびバックライト照明装置に接続されている。コントローラは、複数の2次元カメラによって検出された、バックライトで照らされた複数の影の画像に基づいて(複数の)部品302のオフセットおよび方向情報を決定するように構成されている。コントローラはオフセットおよび方向情報をピック・アンド・プレイス機械のコントローラに供給する。
(もっと読む)
電子部品吸着装置、電子部品装着装置、及び、電子部品吸着方法
【課題】吸着口から吸入されるフラックスの量を十分に低減しながら、電子部品を揺動させることなく保持することが可能な電子部品吸着装置を提供すること。
【解決手段】この電子部品吸着装置100は、電子部品EDと接触し且つ当該電子部品よりも面積が大きい平面である接触面113aを有する。接触面には、吸着口116及び通気口117が形成される。更に、電子部品吸着装置は、吸着口から気体を流入させる吸入装置121を備える。加えて、電子部品吸着装置は、通気口から気体を流入又は流出させる気流生成装置122を備える。電子部品吸着装置は、吸入装置によって吸着口から気体を流入させることにより電子部品を接触面に吸着させる。これによれば、吸着口から吸入されるフラックスの量を十分に低減しながら、電子部品を揺動させることなく保持することができる。
(もっと読む)
吸着ヘッド、ワーク搬送装置及びワーク搬送方法、並びに、半導体チップ実装装置及び半導体チップ実装方法
【課題】半導体チップを吸着して搬送する搬送系に、気体を給排気する機構の荷重が掛かってしまうことを回避して、高精度、低荷重、低衝撃の搬送を実現すること。
【解決手段】吸着ヘッドは、フリップチップWを吸着する吸着コレット12と、該吸着コレットに連通する吸引流路管25を備えて圧縮空気供給部18に空気供給口21aを近接対峙させて該吸引流路管内を減圧するエジェクタ11とを備えて、前記圧縮空気供給部に非接触状態のまま移動する。
(もっと読む)
ロボット教示システム
【課題】ロボットの通過位置が加工位置であるか退避位置であるかを簡単に設定することができ、ロボットの教示作業に必要な時間を短縮することが可能なロボット教示システムを提供する。
【解決手段】ロボット教示システム10は、ロボット11と、ロボットコントローラ12と、ツール13と、制御部20とを備えている。制御部20は、加工対象Wの図面データ25を読み込む図面データ読込部21と、通過位置データ26、加工位置データ27、および退避位置データ28を入力するための入力部22と、ロボット11の通過位置を設定する通過位置設定部24とを有している。通過位置編集部30は、ロボット11の通過位置が加工位置であるかまたは退避位置であるかを設定する。プログラム作成部31は、移動プログラム32を作成し、出力部33により移動プログラム32がロボットコントローラ12へ送信される。
(もっと読む)
電子部品の装着ヘッド、吸着ノズル及び電子部品装着装置並びにエアフィルタ挿入治具
【課題】0.2mm×0.4mmや0.3mm×0.6サイズの小さな部品でもエアフィルタを有する、あるいは、エアフィルタの設置部分の構造が簡単並びに安価である吸着ノズル部を有する電子部品の装着ヘッドを提供し、それを用いることによって信頼性の高い電子部品装着装置を提供することにある。また、エアフィルタを挿入するための適切な治具を提供し、それを用いることによって稼働率の高い電子部品装着装置を提供することにある。
【解決手段】内部に第1の吸引通路を形成した吸着ノズル本体と、前記吸着ノズル本体の下端部に着脱自在に装着され前記第1の吸引通路に連通する第2の吸引通路を形成した吸着ノズルとを有する吸着ノズル部を備えた電子部品の装着ヘッドを具備し、前記吸着ノズル部は、前記吸引通路を遮断するエアフィルタを前記吸着ノズル部の側部から挿入する挿入部を設けたことを特徴とする。
(もっと読む)
ハンドリング装置および電子部品検査システム
【課題】安定かつ高速に電子部品を渡すことができるハンドリング装置および電子部品検査システムを提供する。
【解決手段】昇降装置23は、電子部品を吸着した吸着部215を搬送位置から受け渡し位置に移動させる際、搬送位置からこの搬送位置と受け渡し位置との間の切り替え位置で押圧部235を減速する。これにより、電子部品を渡す直前には切り替え位置よりも低速で電子部品を移動させて受け渡し位置での衝撃を軽減するので、電子部品が破損するのを防ぐことができる。また、電子部品の移動に要する時間を所定の値にできるとともに、切り替え位置までは高速で電子部品を移動させることにより移動に要する時間を短縮することができる。結果として、より安定かつ高速に電子部品を渡すことができる。
(もっと読む)
移動体の移動装置および電子部品実装装置ならびに移動体の位置決め制御方法
【課題】直交ロボットの停止特性を考慮して移動体の移動経路を設定する移動体の移動装置および電子部品実装装置ならびに移動体の位置決め制御方法を提供する。
【解決手段】出発点Oから実装点Aに移動する場合、ノズルは出発点Oと実装点Aを直線で結ぶ破線L1で示した最短の経路ではなく、中継点Dを経由する実線L2、L3で示す経路を選択する。実装点Aから次の実装点Bに移動するときは、実装点Bに対し、実装点Aに対する中継点Dと同じ位置関係となる中継点Eを経由する。さらに実装点Bから次の実装点Cに移動するときも、同様に中継点Fを経由する。実装点A、B、Cと中継点D、E、Fを結ぶ経路L3、L6、L7は全て同方向、同距離であり、ノズルはこれらの経路を同じ加速度で移動する。これにより直交ロボットの停止特性が全ての実装点において同じ条件となり、相対的な位置決め精度が向上する。
(もっと読む)
保持手段駆動装置
【課題】電子部品を順次移動させ工程処理を施すにあたり、電子部品に対する精密な荷重管理を可能とし、荷重制御の高精度化を実現可能な保持手段駆動装置を提供する。
【解決手段】ボイスコイルモータ1403は、電圧と加える推力が比例関係であることを利用して、制御装置1406を通じて所定の電圧が加えられることで、操作ロッド1401に対して一定の推力を与えている。このボイスコイル1403では、操作ロッド1401に加える一定の推力の範囲内において、操作ロッド1401により吸着ノズル1101を介して電子部品3に荷重を加えることで反作用的に加わる当該操作ロッド1401からの反作用荷重が必要以上に大きくならないよう保障する。
(もっと読む)
直交ロボット、該直交ロボットを備えた部品実装装置および前記直交ロボットの制御方法
【課題】ヘッドユニットにより搬送される部品の位置決め精度を確保しつつ、ヘッドユニットに備えられた複数のツールで同時に複数の部品を保持する際の精度を向上させる。
【解決手段】本発明の直交ロボットは、所定の第1の軸線の方向に延びる第1の駆動手段と、前記第1の軸線の方向と交差する第2の軸線の方向に延びる第2の駆動手段と、前記第2の駆動手段の駆動によって前記第2の軸線に沿って移動するヘッドユニットと、前記各駆動手段を制御する制御手段とを有し、該制御手段は、前記第2の軸線が主軸の第1の軸線と直交する方向からずれている場合にそのずれ分を検出し、前記2本の第1の駆動手段を同期させて駆動するためのパラメータを前記ずれ分に相当する量だけずらしつつ、前記2本の第1の駆動手段を駆動するように構成されている。
(もっと読む)
真空吸着ノズル組み立て体
【課題】真空吸着ノズルとフランジの受け部とを強固に接着できるとともに、真空吸着ノズルが帯電して塵埃等が付着して電子部品が汚染したり、真空吸着する電子部品を吹き飛ばしたり、電子部品が静電破壊したりするのを防止できる真空吸着ノズル組み立て体を提供する。
【解決手段】先端に吸着物を真空吸着する吸着面2を備えた半導電性セラミックスからなる真空吸着ノズル1の後端6が導電性または半導電性のフランジ10の受け部11に接着されており、金属部材101を介して後端6と受け部11とを接着させた真空吸着ノズル組み立て体7を用いることにより、真空吸着ノズル1が静電気を帯電し、塵埃等が付着することによる電子部品の汚染や静電破壊や吹き飛びを防止することができる。
(もっと読む)
1 - 20 / 72
[ Back to top ]