
Fターム[3C007AS13]の内容
マニピュレータ、ロボット (46,145) | 用途 (2,903) | 塗装、シーリング (83)
Fターム[3C007AS13]に分類される特許
1 - 20 / 83
動作プログラムの自動生成プログラムおよび装置
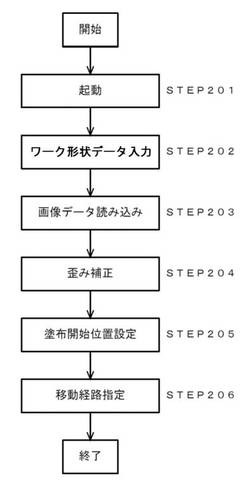
【課題】カメラ等の画像データ入力装置を作業ヘッド近傍に備えることなく、簡易に且つ正確に動作プログラムを作成することができる自動生成プログラムおよび装置の提供。
【解決手段】作業ヘッドを作業対象物に対して相対移動させて所望の作業を行わせるための動作プログラムを自動生成するプログラムであって、作業対象物または領域の形状データを入力可能とする基準データ入力画面を表示する第1のステップと、作業対象物または領域の画像データを読み込む第2のステップと、前記読み込んだ画像データの歪みを補正する第3のステップと、前記補正された画像データを背景として移動経路を指定可能とする移動経路入力画面を表示する第4のステップと、前記入力画面で指定された移動経路に基づき動作プログラムを自動生成する第5のステップと、を有することを特徴とする自動生成プログラムおよびそれに関する装置。
(もっと読む)
塗装ロボット及び塗装システム

【課題】塗装ブースを小型化することが可能な塗装ロボット及び塗装システムを提供する。また、ケーブルを覆うケーブル保護部材を省略することが可能な塗装ロボット及び塗装システムを提供する。
【解決手段】 塗装ロボット50は、塗装ブース20の側壁22に固定される固定部62と、固定部62に対して旋回可能に設けられる旋回部64と、旋回部64に設けられるアーム66と、アーム66の先端部に設けられる塗装ガン68と、を備え、側壁22に固定される固定部62の固定面120に、ケーブル92a、92bを引き込むケーブル引込部112a、112bが設けられる。
(もっと読む)
曲面塗装装置
【課題】曲率が一定でない曲面の塗装面に対しても均一な厚みの塗膜が得られる曲面塗装装置を提供する。
【解決手段】曲面塗装装置100は、高速で塗料の吐出と吐出停止が切り替え可能で、且つ塗料の吐出時間と吐出停止時間の制御可能なノズル2と、ノズル2が取り付けられ、該ノズル2の塗料吐出口を被塗物1の塗装面に対向するように該ノズルの移動可能なロボットアーム4と、ロボットアーム4を制御するロボットコントローラ5と、ノズル2の塗料吐出時間と吐出停止時間の制御可能なノズル駆動回路7と、ロボットコントローラ5及びノズル駆動回路7を制御する主制御装置6とを備え、主制御装置6は、被塗物1の表面を仮想の三次元マトリクス面によって多数の微小塗面12に分解し、各微小塗面に対してノズル2の塗料吐出口が対向するようにロボットコントローラ5を制御すると共に、ノズル2が対向する微小塗面12の面積に応じた塗料の量を吐出するようにノズル駆動回路7を制御する。これにより、曲面の塗装面に対する塗膜の厚みを均一にする。
(もっと読む)
産業用ロボットの速度位置解析システム及び産業用ロボットの速度位置検出装置
【課題】従来の産業用ロボットの速度位置解析システムは、ドリフト安定度の高い慣性センサからの慣性信号に基づいて産業用ロボットの位置等を検出するように構成しているので、高価な慣性センサが必要となり、部品コストの増大の要因になっている。
【解決手段】本発明による産業用ロボットの速度位置解析システムでは、移動制御部20は、産業用ロボット1を静止させているときにデータ蓄積部30に対して静止情報20aを入力する。データ蓄積部30は、静止情報20aを検出したときの慣性信号11aのデータに関連付けて静止情報20aを記憶する。速度位置後解析部31は、静止情報20aが関連付けられている慣性信号11aのデータに基づいて求められる産業用ロボット1の速度をゼロとする補正値を求めて、求めた補正値を用いて慣性信号11aのデータを補正して産業用ロボット1の速度及び位置を求める。
(もっと読む)
ワーク姿勢検出装置、ワーク処理実行装置及びワーク姿勢検出方法
【課題】高精度なワークの位置決めを必要とせず、大まかに位置決めされたワークの位置・姿勢を精度良く検出することが可能なワーク姿勢検出装置、ワーク処理実行装置及びワーク姿勢検出方法を提供すること。
【解決手段】第1のビジョンカメラ7が作業姿勢のキャブ2の第1基準孔17を二次元検出位置から撮像し、撮像された画像を解析して第1基準孔17の位置を求めることによって、基準位置に対する作業姿勢のキャブ2の概略変位が暫定的に演算される。概略変位が演算されたとき、塗装ガン4c及びシーリングガン5c,6cが制御されて、第1の補正位置及び第2の補正位置に塗装ガン4c及びシーリングガン5c,6cが設定され、第1のビジョンカメラ7の第1の画角よりも狭い第2〜第4の画角に設定された第2〜第4のビジョンカメラ8,9,10が、作業姿勢のキャブ2の第1〜第3基準孔17,18,19を撮像する。
(もっと読む)
ロボット
【課題】適切な剛性を有する直動軸受が選定されたロボットシステムを提供する。
【解決手段】この塗装ロボット100(ロボットシステム)は、ロボット本体10と、ロボット本体10を直線移動可能に支持する直動軸受2および3とを備え、直動軸受2および3は、直動軸受2および3の撓みに起因する変位を考慮して予め設定された、ロボット本体10の重量と直動軸受2および3の剛性との相関関係に基づいて選定されている。
(もっと読む)
塗装ロボット用保護カバー
【課題】 塗料ミストなどの吸着性に優れ、かつ塗装ロボット動作時に破れることがない塗装ロボット用保護カバーを提供する。
【解決手段】 塗装ロボット用保護カバーは、合成樹脂からなるフィラメント糸をニット編みしてなる伸縮可能な編物地に、半固体状組成物を含浸させて付着させてなる。半固体状組成物は、ペトロラタム、又はペトロラタムとポリエチレングリコールとの混合物からなるとよい。保護カバー1は、例えば、塗装ロボット2のアーム部21や、塗装ガン22などを被覆する。
(もっと読む)
ハンガーラインへのワーク供給装置及び方法
【課題】移動する複数のハンガーのフックに、ハンガーの移動を停止することなく、かつフックの方向を制限することなく、特別な付帯設備を用いずに、ワークを安全かつ確実に吊下げることができ、ハンガーラインの速度を高めることができるハンガーラインへのワーク供給装置及び方法を提供する。
【解決手段】ワーク1を把持するハンド11を有し該ハンドを3次元的に移動可能なロボット12と、ロボットを制御するロボット制御装置と、ハンガーライン2内を移動するハンガー3の画像を撮影する撮像装置16と、ロボット制御装置へハンドの手先軌道を出力するリアルタイム計算機とを備える。撮影画像に基づきハンガー3に設けられたフック4の位置と姿勢を検出し、この検出結果に基づいてロボット12をフィードバック制御し、ワーク1を把持したハンド11をフック4の移動に追従させて移動しワーク1をフック4に吊下げる。
(もっと読む)
液滴吐出装置
【課題】生産効率を向上させる液滴吐出装置を提供する。
【解決手段】ワーク5に液滴を吐出する前にワーク5に前処理を施す前処理部20と、液滴を水平方向に吐出可能に取り付けられた液滴吐出ヘッドを備え、液滴吐出ヘッドから液滴を吐出して液滴をワーク5に塗布する液滴吐出部30と、液滴が吐出されたワーク5に後処理を施す後処理部50と、ワーク5を鉛直方向に吊り下げて把持可能なチャック部78を有する搬送部70と、を有し、前処理部20と、液滴吐出部30と、後処理部50とが搬送部70のチャック部78の移動範囲6内において順に配置され、搬送部70のチャック部78がワーク5を把持した状態で前処理部20と、液滴吐出部30と、後処理部50とを順次移動可能に構成する。
(もっと読む)
教示ライン補正装置、教示ライン補正方法、及びそのプログラム
【課題】基準部位の相関関係が異なっていた場合も、その誤差の影響を緩和し、ティーチングデータを精度良く補正するための教示ライン補正装置、教示ライン補正方法、及びそのプログラムを提供する。
【解決手段】予め設定された基準部位の第1基準位置aと第2基準部位の第2基準位置bとを通る線を含む平面であり、且つ、第3基準部位の第3基準位置cで決定される第1平面を規定し、検出した第1基準部位の位置a´と、検出した第2基準部位の位置b´とを通る線を含む平面であり、且つ、検出した第3基準部位の位置c´で決定される第2平面を規定し、第1基準部位を原点とし、原点の前記第1基準部位の前記第1基準位置が、検出した原点の前記第1基準部位の位置と同じ位置になり、且つ、該第1平面が該第2平面と同一平面上となる補正量を算出し、該算出した補正量に基づいて、動作ポイントが教示された基準座標を補正する教示ライン補正部とを備える。
(もっと読む)
塗装システム
【課題】車体本体に対して揺動可能に連結されたドア等を容易に開状態とすることが可能であり、しかも、作業効率に優れる塗装システムを提供する。
【解決手段】塗装システム10は、塗装ロボット14a〜14dと、オープナーロボット16とを有する。塗装ロボット14a〜14dは、壁24、26に敷設された第1案内レール28に変位自在に係合された走行台車32を介して設けられ、一方、オープナーロボット16は、壁26に敷設された第2案内レール30に変位自在に係合された走行台車34を介して設けられる。このため、塗装ロボット14a〜14dとオープナーロボット16との間には、高低差が存在する。また、オープナーロボット16のアーム部40の先端には、柱状部の先端から互いに逆方向に分岐して延在する第1爪部及び第2爪部を有する略逆T字形状のフック48が設けられる。
(もっと読む)
塗装システム
【課題】例えば、車体本体に対して揺動可能に連結されたドア等を容易に開状態とすることが可能であり、しかも、作業効率に優れる塗装システムを提供する。
【解決手段】塗装システム10は、塗装ロボット14a〜14dと、オープナーロボット16とを有する。例えば、塗装ロボット14a〜14dは、壁24、26に敷設された第1案内レール28に変位自在に係合された走行台車32を介して設けられ、一方、オープナーロボット16は、壁26に敷設された第2案内レール30に変位自在に係合された走行台車34を介して設けられる。
(もっと読む)
保持軸およびこれを用いた回転塗装装置
【課題】 保持軸が回転軸から脱落することがあるという欠点を解消し、安定した塗装が可能な回転塗装装置の被塗装物を保持する保持軸を提供することにある。
【解決手段】 塗料を吹付けるスプレーガンに対峙させる回転塗装装置の保持部の保持に
おいて、回転塗装装置の回転軸に挿入される保持軸端部に回転軸に対し直角方向に設
うけた回転伝達用ピンの径より僅かに幅広溝で、底部はピン径より大径の円筒面であ
る溝を設けたことを特徴とする回転塗装装置の保持部の保持軸。
(もっと読む)
塗装用ロボットのティーチング装置、及びティーチング方法
【課題】熟練した技能者が塗装用手吹きガンを用いて塗装対象物を塗装したときの塗装用手吹きガンの動きを塗装用ロボットに容易に再現させる。
【解決手段】塗装用手吹きガン10に取り付けられて塗装用手吹きガン10に作用する加速度を時系列で検出する加速度センサ(図中の加速度・角速度検出部14内に収容されている)と、加速度センサにより検出された加速度を記憶する記憶手段(図中の制御装置13内に収容されている)と、記憶手段に記憶されている加速度に基づいて、塗装用ロボット20に塗装用手吹きガン10の動きを再現させるための位置制御データを生成する生成手段(図中の制御装置13内に収容されている)と、を備える。
(もっと読む)
被塗装物保持ロボットおよび塗装用ロボットシステム
【課題】塗装中に吹き付けの気流が乱れ、ロボット等の装置周辺を余分な塗料で汚染することを防止することが可能な被塗装物保持ロボットおよび塗装用ロボットシステムを提供する。
【解決手段】被塗装物保持ロボット10は、固定されたベース部20と、第1軸J1を中心にベース部20に対して旋回する細長状の第1アーム11とを備えている。L字状の第2アーム12は、第2軸J2を中心に第1アーム11に対して旋回し、細長状の第3アーム13は、第3軸J3を中心に第2アーム12に対して旋回する。また第3アーム13の先端13bに、被塗装物Wを保持する第1保持部14が設けられている。
(もっと読む)
スプレーロボットにおけるスプレー移動経路生成方法及びスプレー移動経路生成装置
【課題】スプレー塗布する位置等を基本条件として予め決定し、スプレー塗布の順序をこの基本条件に従って決定することで、入力する人によってスプレー塗布の動作経路にバラツキを発生することがなく、品質とサイクルタイムとにバラツキが発生することもない、最適なスプレー塗布の順序を決定するスプレー移動経路生成方法及びスプレー移動経路生成装置を提供する。
【解決手段】
任意のスプレー位置を選択するST15と、移動パターンを選択するST16と、移動パターンにおいて、送りピッチを設定するST19と、移動パターンの始端に対応するスプレー位置を最初のスプレー位置として選択するST20と、スプレー順序を決定するST21と、を実行することにある。
(もっと読む)
塗装ロボットの教示方法および塗装方法
【課題】 塗装ロボットの動作エラーの発生を抑制することができる塗装ロボットの教示方法、および塗装ロボットの動作エラーの発生を抑制することにより、被塗物を効率よく塗装することができる塗装方法を提供すること。
【解決手段】 自動車ボデー2の三次元データを読み込み、自動車ボデー2の塗装範囲を画成するための基準となる複数の塗装ポイントと、複数の塗装ポイントのそれぞれに対応するコンベヤ値Cvとからなる仮教示点をシミュレーションにより設定し、複数の仮教示点を、コンベヤ値Cvの特定範囲ごとに複数の塗装範囲群に区分する。そして、各前記塗装範囲群におけるコンベヤ値Cvの特定範囲の中間値を算出し、各中間値を、塗装範囲群における塗装ロボット4の動作開始点となるように設定することによって、塗装ロボット4に教示する。そして、その塗装ロボット4を用いて塗装する。
(もっと読む)
作業ロボット用保護カバー
【課題】作業用ロボットへの装着が容易であり、汚れの度合いに合わせて部分的に交換することができ経済的である作業ロボット用保護カバーを提供する。
【解決手段】作業ロボット90の固定部及び可動部の各部分を覆う形状に形成された編み物の覆い布12,14,16,18を備え、この覆い布12,14,16,18は作業ロボット90の関節部分等の各部位で区切られて複数形成されている。各覆い布12,14,16,18が、作業ロボット90の各関節間に位置して、関節部分毎に被覆する。覆い布12,14,16,18には、撥水撥油性、伸縮性及び防炎性のあるフィルムがラミネートされている。
(もっと読む)
内圧防爆構造のロボット
【課題】内圧防爆構造を有しながらも、また塗装ガンなど手首部先端のエンドエフェクタに接続される配管を有しながらも、コンパクトなロボットを提供すること
【解決手段】第1アーム64と第2アーム65とが互いに相対回転する関節部において、一端が危険雰囲気に開口し、第1アーム64の気密室37c内を通り、関節部の回転軸73を含むよう第1アーム64に固定された第1パイプ57と、一端が第1パイプ57に連通し、第2アーム65の気密室37d内を通り、他端が危険雰囲気に開口するよう第2アーム65に固定された第2パイプ59と、第1と第2アームの気密室を危険雰囲気からシールする第1シール部材55と、第1と第2パイプが互いに相対回転する部分をシールする第2シール部材58と、を備え、第1と第2パイプ内にエンドエフェクタへ接続されるチューブ68類が配線されるようにした。
(もっと読む)
エアーブロー装置
【課題】エアーホースがロボットアームに巻き付くことがなく、その結果エアーホースがロボットアームに擦れて表面に付着したホコリ、ブツが剥離し、落下することによる塗装面の不良を招くことがないエアーブロー装置を提供する。
【解決手段】自動車ボディの電着塗装における塗料若しくは水洗水の二次タレを防止するために使用されるエアーブロー装置1は、ロボットアーム2の先端にブラケット3によりエアーホース9が接続されたエアーブローノズル4が取り付けられており、エアーブローノズルの先端にノズルヘッド6を有する回転プレート5が回転可能に取り付けられている。エアーブローノズル先端部の回転プレートが回転してもエアーホースが接続されているエアーブローノズルは回転しないので、エアーホースがロボットアームに巻き付くことがない。
(もっと読む)
1 - 20 / 83
[ Back to top ]