
Fターム[3C007AS36]の内容
マニピュレータ、ロボット (46,145) | 用途 (2,903) | エンタテインメント用 (219)
Fターム[3C007AS36]に分類される特許
1 - 20 / 219
ロボットハンドの制御装置
【課題】簡易な構成で硬さの異なる被接触体に対応することができるロボットハンドの制御装置を提供する。
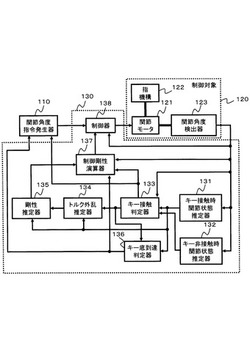
【解決手段】本発明の一形態に係るロボットハンドの制御装置は、指が被接触体に接触した時における関節の状態を推定する接触時関節状態推定器131と、指が被接触体に接触していない時における関節の状態を推定する非接触時関節状態推定器132と、指が被接触体に接触したか否かを判定する接触判定器133と、関節に印加されるトルク外乱を推定するトルク外乱推定器134と、被接触体の剛性を推定する剛性推定器135と、接触判定結果が接触状態の場合、関節の制御剛性を、指が被接触体の押し込み状態を維持できる最小値に演算する制御剛性演算器137と、関節モータ121を制御する制御器138と、を備える。
(もっと読む)
ロボットによるサービス提供システム、ロボット管理装置及びロボット管理方法

【課題】人間のように柔軟性の高い知識構造を実現可能とする。
【解決手段】ロボット3によるサービス提供システム1は、それぞれ異なる性質の情報元から得られる情報に基づいて各レイヤーが生成され、かつ、各レイヤーにおいて、所定の観点から要素間の関係性が構築されている複数のレイヤーであって、当該複数のレイヤーを備える知識NW11と、ユーザからの要求タスクに含まれる情報に基づいて、知識NW11が備えるレイヤーから前記情報に関連する要素を抽出し、その抽出した要素と前記情報との関係性を記述することで、要求タスクに応じたタスクベースオントロジーを生成するオントロジー生成部12と、生成したタスクベースオントロジーを用いて、ロボット3の動作を制御するロボット動作制御部13と、を備える。
(もっと読む)
サービス提供システム及びサービス提供方法
【課題】無人あるいは通常よりも少ない人員であってもより多様な商品及び役務を提供することができるようにしたサービス提供システムを提供する。
【解決手段】インターフェイスにより注文入力情報の入力を受け付け、インターフェイスにより入力された注文入力情報に基づいて、ロボットユニットに加工作業を実行させロボットユニットにより加工作業を施した商品を提供する。
(もっと読む)
コンパクトな駆動ユニットを持つ広報用ロボット
【課題】人体模型を屈伸駆動させる駆動ユニットをコンパクトにして人体模型に内蔵し、人体模型の屈伸動作を滑らかに進行させることでより効果的な広報になるようにした広報用ロボットを提供する。
【解決手段】下体部と、前記下体部の上部に屈伸動作が可能に結合される上体部とを含む人体模型;及び駆動モーター、前記駆動モーターに回転可能に結合されるスクリューバー、前記スクリューバーに昇降可能に結合される昇降部材と、下部は人体模型の下体部に配置され、上部は人体模型の上体部に固定結合されて配置され、固定軸に回転可能に軸設されている回転ロッド、上端は前記回転ロッドの下端に軸設され、下端は前記昇降部材に軸設され、前記固定軸を軸として前記回転ロッドを一定範囲内で回転させる中継ロッドとを含む駆動ユニット;を含んでなる広報用ロボット。
(もっと読む)
人工筋肉及び柔軟関節機構
【課題】使用目的・使用状況に応じ剛性を任意に構成可能な駆動機構とそれを用いた柔軟関節機構を提供する。
【解決手段】駆動基盤本体に固定された二台のサーボモータとアームに固定されたプーリとの間を、複数の弾性体を束ねてなる負荷変位特性生成部1013を介して接続し、拮抗機構を構成する。複数の弾性体は例えばゴムであって、長さを異ならせることによって、サーボモータで引張したときに伸び始める点、すなわち発火点が異なるようにする。二台のサーボモータを反対方向に駆動すればプーリが回転し関節が回転する。同一方向に駆動すればプーリすなわち関節は回転しないが負荷変位特性生成部が伸縮し、プーリすなわち関節の回転剛性を可変できる。弾性体が複数あることから負荷変位特性は折れ線とすることができる。
(もっと読む)
電子機器
【課題】人に生物的な擬似感覚を与える新たなペット型玩具あるいはペット型ロボットの提供。
【解決手段】燃料電池21と、燃料電池21の出力に関する情報を電気信号に変換して出力するコントローラ10と、コントローラ10から出力される電気信号に基づいて、外部から認知可能な物理的変化を提示するスピーカ18、アクチュエータ3AA1〜5A2等を備える電子機器を提供する。この電子機器では、生物個体の活動に近似した燃料電池の出力特性に応じて動作や音声出力等を制御し、ユーザに提示させることで、ユーザに生物的な擬似感覚を与えることができる。
(もっと読む)
ロボット装置、ロボット装置の行動制御方法及びプログラム
【課題】 学習対象物の共有(共同注意)を可能として、適切に学習対象物を特定することを可能にする。
【解決手段】 ロボット装置は、学習対象物を特定する学習対象物特定手段として機能するセグメンテーション処理部132及び学習対象物検出部133が特定した学習対象物の情報を連想想起記憶部に記憶し、行動制御部により、新たな検出した物と連想想起記憶部に記憶した学習対象物の情報とに基づいて行動をする。
(もっと読む)
傾聴対話持続システム
【課題】コミュニケーション障害のある者同士の対話が持続可能なテレビ電話を提供する。
【解決手段】傾聴対話持続システム100は、モニタ16a、マイク20aおよびモニタカメラ22aが接続されるPC14aと腹部カメラ12aが設けられるロボット10aとを含む。PC14aでは、モニタカメラ22aおよび腹部カメラ12aによって撮影されたユーザAの画像とマイク20aによって集音されたユーザAの音声とに基づいてユーザAの行動が判定され、メモリに記憶される。また、PC14aでは、第1所定時間分の行動データからユーザAの状態を認識する。そして、ユーザの状態が「アクティブ・トーク・モニタ」と認識されていれば、PC14aはロボット10aがユーザAに対して疑似傾聴を行うように、ロボット10aに動作命令を付与する。
(もっと読む)
経路計画生成装置および該方法ならびにロボット制御装置およびロボットシステム
【課題】本発明は、コミュニケーションにより生じた動作の遷移をスムーズに行う経路計画を生成し得る経路計画生成装置、該方法、ロボット制御装置およびロボットシステムを提供する。
【解決手段】本発明の経路計画作成部22は、複数のモーションデータを記憶するモーションデータ記憶部31と、動作の遷移の必要が生じた場合に、各モーションデータについて実行中の一の動作での所定の第1姿勢と他の動作での所定の第2姿勢との距離を求める距離演算部32と、第1閾値以下の前記距離を与える他の動作のモーションデータを選択する遷移先選択部33と、第1姿勢までのデータと第2姿勢以降のデータとを連結して新たな経路計画のデータを生成する経路計画部34とを備え、経路計画部34は、第1および第2姿勢間の距離が第1閾値以下でこの第1閾値よりも小さい第2閾値以上である場合に第1および第2姿勢間の経路のデータを確率的ロードマップ法で生成する。
(もっと読む)
擦弦楽器演奏ロボット
【課題】目標値に対する追従性が向上し、音色が人間の演奏に近くなる擦弦楽器の自動演奏ロボットを提供する。
【解決手段】歪ゲージ930によって弓920の歪を計測する。演奏データ記憶部210には、楽曲演奏時に弓毛922が弦911を押す応力を指令する歪データが設定記憶されている。弓押込角算出部310は、前記歪データに追従するために必要な弓920の押し込み角の指令値を算出する。制御パラメータ設定部350は、楽曲演奏時に弓毛922と弦911と接触位置に応じて制御パラメータを更新設定する。
(もっと読む)
連結部の被覆材
【課題】連結部に巻き込まれることを被覆材により防止しつつ、第一部材と第二部材とが屈曲した際にその被覆材そのものに挟まれることを防止できる連結部の被覆材を提供する。
【解決手段】可撓性を有し、撓み変形可能となるように第一部材14の所定位置に取り付けられる第一端部61と、可撓性を有し、撓み変形可能となるように第一部材14の所定位置から離間して位置する第二部材16の所定位置に取り付けられる第二端部62と、可撓性を有し、第一端部61と第二端部62とに一体的に結合され、連結部を被覆し且つ連結部から離隔可能に設けられる中間部63とを備える。中間部63の曲げ剛性は、全体に亘って、第一端部61の曲げ剛性より大きく設定されている。さらに、第一部材14と第二部材16とが屈曲する場合に、中間部63が連結部から遠ざかるように凸状に変形する。
(もっと読む)
エンターテイメントにおけるロボットのリモコン装置、制御方法及び制御プログラム
【課題】 演劇、ミュージカル、漫才、コントなどのエンターテイメントにロボットを用いる場合、ロボットと人(役者)との演技のタイミングを合わせることができるリモコン装置、制御方法及び制御プログラムを提供する。
【解決手段】 ロボットが次の演技を行うための待機状態において、異なるID番号を付加されたリモコン装置より送信される制御信号の有無を判断し、次の動作(演技)を実行する。所定時間内に制御信号が無ければ予め定められた行動パターンを実行する。
(もっと読む)
ぬいぐるみロボット
【課題】玩具としてだけでなく、人間にとって癒しの効果を有し、かつ、人間とコミュニケーションをとることのできるぬいぐるみロボットを提供する。
【解決手段】弾力性を有する充填材料4からなる動作部2と、充填材料4の内部を貫通するように、又は充填材料4の外側に沿うように配設された少なくとも1本の糸3(3a〜3c)と、糸3の巻き取り、巻出しを行うモータと、糸3(3a〜3c)の長さを検出するエンコーダと、糸3(3a〜3c)の張力を検出するセンサ部と、エンコーダ及び前記センサ部から検出された値に基づいて、モータを制御する制御部とにより、ぬいぐるみロボットを構成する。
(もっと読む)
ロボットアーム、ロボット及び制御方法
【課題】打楽器の演奏だけでなく他の作業も可能とするロボットアームを提供すること。
【解決手段】本発明の一態様に係るロボットアームは、動作部と、前記動作部が回動自在に連結された支持部と、前記動作部の回動運動を直線運動に変換して、移動部材に伝達する変換機構と、前記移動部材の移動距離を検出する距離センサと、前記距離センサで検出された前記移動部材の移動距離に基づいて、前記動作部の動作を制御する制御部とを備えるものである。
(もっと読む)
打楽器演奏マニピュレータ及び打楽器演奏ロボット
【課題】打面を叩いたときの衝撃によるアーム等への負荷を減少させ、ロボットの消費電力を低減させる。
【解決手段】本発明の一態様に係る打楽器演奏マニピュレータ10は、スティック31を動作させるための掌部23fと、スティック31の先端が打楽器30の打面30aに向かう回転力を掌部23fに付与する電動機13とを備え、電動機13は、打面30aとの衝突で跳ね返されたスティック31の打面30aと反対方向へ向かう回転力を電力として回収し、スティック31を制動する。
(もっと読む)
ロボットの好感度形成装置及びその方法
【課題】本発明は、ロボットとヒトとの情緒的インタラクションを通じて、互に好感度を形成する装置及びその方法を提供する。
【解決手段】本発明は、ユーザーの入力した特徴値の入力を受けてロボットとユーザーとの個人的な親密度を計算し、ロボットrとユーザーiとが他のユーザーとの関係の中で形成する緊張度を計算して、ユーザーに対するロボットの好感度を計算する好感度生成部と、前記好感度生成部を通じて生成されたロボットの好感度によってロボットの感情強度を調節し、ロボットの行動の前・後に好感度を表現する行動を付け加えて表現する好感度表現部と、前記好感度表現部を通じて計算されたユーザーに対するロボットの好感度表現程度と、ユーザーの感情的反応の入力を受けて、2つの情報の差異に基づいて利益を計算し、これを利用してユーザーの入力特徴値を更新する好感度学習部とを包含する。
(もっと読む)
ロボット、ロボットプログラム共有システム、ロボットプログラム共有方法およびプログラム
【課題】共有プログラムデータベースからプログラムを検索する際に、簡単な操作でプログラムを取得できるロボットプログラム共有システムを提供する。
【解決手段】ロボット200の、所定の事象を検知するイベント入力部205と、イベント入力部205で所定の条件に適合する事象を検知した場合に、その条件に応じて、プログラム取得指令またはプログラム実行指令のいずれかを含む指令を生成するコマンド生成部206と、プログラム取得指令を生成した場合に、イベント入力部205で検知した事象に応じて共有プログラムデータベース100から所定のプログラムを検索してダウンロードするプログラム検索部212と、プログラム実行指令を生成した場合に、ロボット200に格納しているプログラムを実行するプログラム実行部204と、を備える。特に、イベント入力部205は、動作を表す明示的な言語の媒介によらない事象を検知する。
(もっと読む)
弦楽器演奏ロボット及びその制御方法
【課題】弓と弦の接触座標系を自動で算出・設定することができる弦楽器演奏ロボット及びその制御方法を提供すること。
【解決手段】本発明の一態様に係る弦楽器演奏ロボットは、弓を把持する手部を有し、弓により弦楽器を演奏する弦楽器演奏ロボットであって、弓の代わりに、手部に装着される治具20と、治具20に設けられ、治具20を弦楽器の弦に接触させた際に、治具20にかかる力に応じた信号を出力する応力センサ23と、応力センサ23からの出力信号に基づいて、弓の弦に対する接触座標系を算出する制御部を備え、制御部により算出された接触座標系を用いて、治具を弓に持ち替えて弦楽器を演奏する。
(もっと読む)
ロボット操作入力装置およびそれを備えたロボット
【課題】操作者の動作に追従するようにロボット脚を操作することのできるロボット操作入力装置を、従来よりも少ない数のセンサにて実現する。
【解決手段】ロボット操作入力装置は、歩行可能な脚2を有するロボット1の当該脚2を操作するための入力装置である。ロボット操作入力装置は、操作者100の足115を支持する足支持部材32と、足支持部材32と一体化されまたは足支持部材32に取り付けられ、操作者100のくるぶしに追従して動く追従部材31と、追従部材31に取り付けられた6軸力覚センサ20と、を備えている。
(もっと読む)
ロボット、同期制御方法及びプログラム
【課題】無線での通信手段しか存在しない場合においても、定期的に合奏を満足する精度のタイミングの同期をとることを可能にするロボット、同期制御方法及びプログラムを提供する。
【解決手段】基準ロボット10は複数個のLED13を所定の点灯パターンで発光させ、演奏ロボット30はCCD33によりLED13の点灯パターン周期と異なる周期でLED13の点灯パターンを取りこみLED点灯中央演算部36で点灯度を計算する。一方、基準ロボット10はLED点灯中央値演算部17で自身の点灯度を計算する。無線通信部19,38を介して、点灯度の情報を伝達し、両者の点灯度を比較して遅延時間計算部20で演奏ロボットの遅延時間を計算する。計算された遅延時間は演奏ロボットに通知され動作タイミングを修正する。
(もっと読む)
1 - 20 / 219
[ Back to top ]