
Fターム[3C007CV10]の内容
マニピュレータ、ロボット (46,145) | 第1の腕の動作形態 (562) | 第1の腕が回動するもの (446) | 腕の軸心まわりに回転するもの (27)
Fターム[3C007CV10]に分類される特許
1 - 20 / 27
荷物移送用ロボットと該ロボットの制御方法
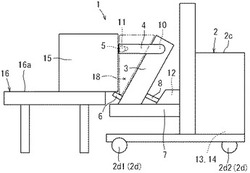
【課題】棚の上などにおいた荷物を所定位置に好適に押すことのできる荷物移送用ロボットを提供する。
【解決手段】荷物移送用ロボット1であって、車輪2dを有するベース2と、ベース2に対して傾動可能に設けられるボディ3と、ボディ3をベース2に対して傾動させる傾動装置8と、ボディ3に対して動作可能に設けられるアームと、アームをボディ3に対して動作させる動作装置10,11と、制御装置12を有する。制御装置12は、傾動装置8を制御してボディ3をベース2に対して傾動させてボディ3の傾動方向の反対側にスペース18を形成し、かつスペース18を形成した時に動作装置10,11を制御してスペース18にアームの一部または全部を移動させる制御モードを有する。
(もっと読む)
移載装置

【課題】小型で高速動作が可能な移載装置を安価に提供する。
【解決手段】側面に第1と第2の円筒溝カム(11,12)、底面51に溝カム52が形成されたシリンダー4と、ピニオンギア23環装され、第1円筒溝カムにより上下するシャフト部21と、第2円筒溝カムによってシャフト部内で上下するロッド部22と、ピニオンギアに歯合して溝カムにより前後するラックギア54と、物体W1の把持と開放を相補的に行う二つ一組のチャック部31を備えたチャックユニット6aを備え、ピニオンギアはシャフト部を介してチャックユニットを旋回させ、ロッド部はシャフト部と同期して上下するとともに、シャフト部の下死点停留期間Δt2中にさらに下方の第2下死点Dd2に至り、二つ一組のチャック部はロッド部が第2下死点に至ったときに、それぞれの把持状態と開放状態を切り替え、上死点と第1の下死点までの区間ではその状態を維持する。
(もっと読む)
7軸多関節ロボットの制御方法及び制御プログラム
【課題】手首の位置を移動する際に7軸多関節ロボットの形態の急激な変化を抑制する。
【解決手段】7つの回転軸のうちのいずれか1つを冗長軸に、残りの回転軸のうちの3つを基軸に、かつ3つの基軸のうちのいずれか1つを変数軸に定め、かつ、基端から前記手首までの直線距離と基端に最も近い回転軸の延在方向における基端から手首までの距離とに基づく手首の位置と前記変数軸の関節角とに関して定式化された4次方程式を解いて手首の位置を3つの基軸の関節角に逆変換するステップを含み、電源オン時に、7軸多関節ロボットの初期形態に基づいて4つの第1求解演算式のうちいずれか1つを特定して記憶し、 電源オンの後、記憶した1つの第1求解演算式を用いて逆変換するステップを遂行して手首の目標位置から3つの基軸の関節角を算定し、それにより、7軸多関節ロボットの動作を制御する。
(もっと読む)
ノズル吸引式の対象物の搬送装置、搬送方法及びこれらに用いられるプログラム
【課題】磁気ヘッドのスライダチップなどの微小部品のノズル吸引式による搬送装置において、従来の装置構成に変更を加えることなく、自動的に、ノズル吸着位置のずれによる影響を最小限に抑えて搬送不良を防止することができる搬送装置及び搬送方法を提供する。
【解決手段】ノズル吸着位置がずれた場合であっても、ノズルを回転させてノズル吸着位置のずれの影響が最小限となるノズル回転位置を撮像画像から検出し、その回転位置にて搬送を行うことにより、ノズル吸着位置のずれに対する調整を自動的に行うことができる。
(もっと読む)
双腕ロボット及びそのハンドリング方法
【課題】双腕ロボット及びそのハンドリング方法において、パレタイズ時にワークを歪むことなく保持する。
【解決手段】双腕ロボットは、左右一対で構成されたワークを保持する第1ハンド部2a及び第2ハンド部2bと、制御部とを備える。両ハンド部2a、2bは、それぞれ長爪21と可動する短爪22とを有する。ワークWがストッパ91によって位置決めされているとき、制御部は、両ハンド部2a、2bを移動させて両爪21、22の間にワークWを位置させる。そして、両ハンド部2a、2bを距離m1だけ移動させることにより、ワークWを押し動かしてワークWとストッパ91との間にクリアランスCを生じさせる。これにより、その後、両ハンド部2a、2bの短爪22を可動させても、ワークWがストッパ91に押し付けられて歪むことがなくなり、ワークWを長爪21に押し付けて保持することができる。
(もっと読む)
双腕ロボット及びそのハンドリング方法
【課題】双腕ロボット及びそのハンドリング方法において、パレタイズ時にワークを適切な位置に整列積載する。
【解決手段】双腕ロボットは、左右一対で構成されたワークを保持する第1ハンド部2a及び第2ハンド部2bと、制御部とを備える。両ハンド部2a、2bは、それぞれ長爪21と可動する短爪22とを有する。両ハンド部2a、2bによってワークWaを保持しているとき、制御部は、先に第1ハンド部2aを退避させ、ワークWaの第1ハンド部2a側の隅部を降下させる。次に、制御部は、第2ハンド部2bを退避させ、ワークWaの第2ハンド部2b側の隅部を降下させ、ワークWaをワークWb上に積載する。これにより、先の第1ハンド部2aの退避時においても、またその後の第2ハンド部2bの退避時においても、各ハンド部の摩擦力が動摩擦となり、それぞれの動作時にワークがハンド部に引っ張られることがなくなる。
(もっと読む)
ロボット用取付ユニット
【課題】ロボット本体に取付けるための締結固定子が保護用のカバーの穴部から落下することがないように構成しながら、取外した締結固定子をロボット本体に確実に固定することができるロボット用取付ユニットを提供する。
【解決手段】カバー51に形成された長穴部53は、ボルト48の着座面を側方から視認可能に開口しているので、長穴部53から塵や油等の異物が入り込んでボルト48の着座面に付着した場合であっても、それらを清掃することによりボルト48を確実に締付けることができる。
(もっと読む)
マニピュレータ
【課題】軸に直交する方向の微小な並進変位と軸まわりの回転変位を与えるコンパクトで単純な機構のマニピュレータを提供する。
【解決手段】作業を行うアーム部2と、アーム部2の回転角を制御する回転角制御部3と、アーム部2の変位を制御する変位制御部4と、を備えたマニピュレータ1において、回転角制御部3は、回転駆動力を付与する回転角付与手段31を有し、アーム部2は、回転角付与手段31に接続され、回転可能であると共に、屈曲可能な屈曲軸部21と、屈曲軸部21に接続され、屈曲軸部21が屈曲することにより移動する作用軸22と、作用軸22の先端に設置され、各種作業を行う作業部23と、を有し、変位制御部4は、作用軸22に力を付与する変位付与手段41と、変位付与手段41の駆動力を伝達し、作用軸22に常に当接する出力部材42と、を有することを特徴する。
(もっと読む)
ロボットアーム
【課題】精密な作業が可能であって人間の生活環境でも安全に使用でき、しかも極力小型軽量化できる多関節ロボットアームを提供する。
【解決手段】剛性能動関節とされた肘関節J3〜J5および手首関節J6,J7により、ハンドHDの位置や姿勢の精度が十分に確保されるため、ハンドHDによる精密な作業が可能となる。また、柔軟能動関節とされた肩関節J1,J2により、人体に接触した際の衝撃が緩和されるため、人間の生活環境での安全な使用が可能となる。さらに、大型で重量も嵩む柔軟能動関節は、基端部側の2つの肩関節J1,J2のみとされているため、大型重量化が最小限に抑えられる。しかも、重量の嵩む肩関節J1,J2の重量に起因する大きなモーメントは先端部側の肘関節J3〜J5、手首関節J6,J7には作用しないため、これらの関節を補剛する必要がなく、その分、大型重量化が抑えられる。
(もっと読む)
ロボットアームの姿勢教示方法および姿勢教示装置
【課題】 操作者による教示の手間と時間を低減し、ロボットアームの動作角度が不所望に大きくなることを防止すると共に、ロボットアームの姿勢の位置エネルギ等の低減を図り必要動力を小さくすることができるロボットアームの姿勢教示方法および姿勢教示装置を提供する。
【解決手段】 ハンド8を仮位置決めした後座標原点O7を算出して干渉有無を判断し、干渉ない場合関節J1,J2角度を規定し、肘部4の座標原点O4を算出する。座標原点O4等に基づき干渉有無を判断して手首角度等を算出する。
(もっと読む)
スカラロボット
【課題】アーム部の位置制御が容易でロボット先端部の配置位置と目標位置とのズレの少
ないスカラロボットを提供する。
【解決手段】スカラロボット1は、ベース部2、アーム部3、搬送部4から構成され、ベ
ース部2は、床面等に設置されたベース10を有する。アーム部3は、ベース10に対し
て回転可能に第1のアーム11を、第1のアーム11に回動可能に第2のアーム12を、
第2のアーム12に回動可能に先端部13Bにツールの取付可能な第3のアーム13を備
えている。搬送部4は、支持腕21が固定されて、アーム部3の回動方向とは垂直の方向
に回動する外筒部10Cを有する。支持腕21は、支持腕21に対して回動可能に駆動軸
22が突出形成され、駆動軸22はワークを保持するワーク保持装置23を備えている。
従って、搬送部4は、ワーク保持装置23に保持したワークを搬送面(XY平面)の所定
の目標位置に配置できる。
(もっと読む)
マニプレータシステム
【課題】マスタースレーブ方式のマニプレータにおいて、簡便な手法で作業者とマスターアームの干渉を無くし、作業者の動作範囲を広く確保する。
【解決手段】腕部11及びハンド部20を有するマスターアーム10と、マスターアーム10の動作に追従するスレーブアーム30とを備えたマニプレータシステム1であって、作業者Pがマスターアーム10に動作を入力する動作入力部が、マスターアーム10のハンド部20に設けられ、マニプレータシステム躯体へのマスターアーム10の取付部が、ハンド部20を挟んで、作業者Pの操作位置A1に対向するように設けられている。
(もっと読む)
双腕型ロボットマニピュレータ
【課題】本発明は、マニピュレータの設置位置を変えることなく上部及び前方からのアプローチを可能にした双腕型ロボットマニピュレータを提供する。
【解決手段】旋回軸J8上に配置された胴体1と、前記胴体1に備えられた右腕2Rおよび左腕2Lと、前記右腕2Rおよび前記左腕2Lが複数の関節軸J1〜J7で構成された双腕型ロボットマニピュレータにおいて、前記右腕2Rと前記左腕2Lは、全て共通のアーム体で構成されたものである。
(もっと読む)
双腕型ロボットマニピュレータ
【課題】本発明は、マニピュレータの設置位置を変えることなく上部及び前方からのアプローチを可能にした双腕型ロボットマニピュレータを提供する。
【解決手段】旋回軸J8上に配置された胴体1と、前記胴体1に備えられた右腕2Rおよび左腕2Lと、前記右腕2Rおよび前記左腕2Lが複数の関節軸J1〜J7で構成された双腕型ロボットマニピュレータにおいて、前記右腕2Rおよび前記左腕2Rの第1の関節軸J1が前記胴体1の前方に配置されたものである。
(もっと読む)
ロボットアーム
【課題】高圧空気を駆動源とするワーク保持手段への配管が外部に露出せず、省スペース化が可能であると共に、メンテンス性を良好に保つことが可能なロボットアームを提供する。
【解決手段】軸方向に沿って所定のピッチで多数の磁極が配列されたアーム軸3と、このアーム軸3が遊嵌する貫通孔を有すると共に該アーム軸3と相まってリニアモータを構成し、印加される電気信号に応じて前記アーム軸3を軸方向へ進退させるフォーサと、前記アーム軸3の一端に設けられると共に空気圧に応じて動作するワーク保持手段4とから構成され、前記アーム軸3には前記ワーク保持手段4に対して空気圧を作用させるための流体供給孔30が軸方向に沿って貫通形成され、この流体供給孔30がワーク保持手段4の供給ポートに接続されている。
(もっと読む)
ロボットハンド
【課題】対象物のハンドリング性に優れたロボットハンドを提供する。
【解決手段】振動アクチュエータVにより回転子6を回転させて指部2を移動させ、指部2の互いに摩擦係数の異なる2つの物体接触面8及び9のうちの一方を対象物に接触させ、この状態で対象物をハンドリングする。振動アクチュエータVにより指部2がその中心を通る回転軸Rの周りに180度回転するように回転子6を回転させて2つの物体接触面8及び9のうち他方の物体接触面を対象物に対向させ、さらに指部2を移動させてこの他方の物体接触面を対象物に接触させることにより、摩擦係数の異なる他方の物体接触面で対象物がハンドリングされる。
(もっと読む)
マイクロマニピュレータ
【課題】把持指開閉の微調整可能で操作性の高いマイクロマニュピュレータを提供する。
【解決手段】細胞ハンドリングシステムは、把持アクチュエータ71の駆動力により2本の把持指の先端部を近接させて細胞を把持するハンドリング部と、ハンドリング部をX、Y及びZ方向に移動させるX、Y、Z方向アクチュエータと、ポテンショメータ9aを有し、アクチュエータ71の駆動信号を入力するための第1コントローラと、X、Y、Zアクチュエータの駆動信号を入力するための第2コントローラと、ポテンショメータ9aから出力される電圧とホール素子715aから出力される電圧との差がゼロとなるようにアクチュエータ71の駆動を制御する把持アクチュエータ制御部70と、第2コントローラからの入力に応じたパルス数により、X、Y、Zアクチュエータの駆動を制御するX、Y、Zアクチュエータ制御部と、を備える。
(もっと読む)
医療用マニピュレータ
【課題】機構を単純化して信頼性を向上させ、かつ、操作性に優れた医療用マニピュレータを提供する。
【解決手段】操作指令部、連結部30、作業部、制御部を備えた医療用マニピュレータであって、連結部はトラカールの孔に挿入可能であり、支持部は、連結部の中心軸方向に対して直交する回転軸を有する第1の回転軸と、第1の回転軸に対して直交する回転軸を有する第2の回転軸とを有し、処置部の中心軸方向は、第2の回転軸の軸方向と概ね平行であり、支持部は、第1の回転軸の回りに回転可能な一対の第1ギアと一対の第1ギアに連動して第2の回転軸の回りに回転可能な一対の第2ギアと、一対の第2ギアと共に第2の回転軸の回りに回転可能な一対の連結部材53,54を有し、処置部は、処置部回転軸57と処置部回転軸の回りに回転自在な一対のグリッパ14a,14bを有する。
(もっと読む)
ロボットシステム
【解決手段】ターンテーブルの回転軸から離れた位置にある軸を中心にして回転させることができるように、ターンテーブル上に軸回転可能に取り付けられているアームを有する、回転させることのできるターンテーブルを含んでいるロボットシステム。アームの回転軸は、ターンテーブルを基部上に支持する軸受よりも、ターンテーブルの回転軸の近くに配置されている。アームは、ターンテーブルの下方に位置する、アームの回転軸を横断する方向に伸張する部分を有している。ターンテーブルは、基部の上に、共通平面に位置する部分を有する単一の軸受によって支持されている。 (もっと読む)
アーム機構を備えた移動ロボット
【課題】 到達可能範囲を大きくでき、運搬・移動作業時に折り畳むことが可能な、出っ張りもなく収納が可能な安全性の高いアーム機構を備えた移動ロボットの提供。
【解決手段】 移動ロボットは、本体側面の第1関節で回動可能に軸支される第1アーム部101を備えている。第1アーム部には、収納用凹部及びこの収納用凹部に連通する開口部107を有し、この収納部に折り畳み機構が収納される。折り畳み機構では、第1アームに第2アーム部102が第2関節部を介して連結され、第3アーム部104が第2アーム部に第3関節部を介して連結されている。第1アーム部は、第1関節の周りに回動されてその開口部を任意の方向に向け、収納用凹部に沿って前記第2関節部をスライドさせて折り畳み機構を開口部から取り出すことができ、第3関節部の周りで前記第3アーム部を回動して第3アーム部を展開することができる。
(もっと読む)
1 - 20 / 27
[ Back to top ]