
Fターム[3C007ES17]の内容
マニピュレータ、ロボット (46,145) | 挟持装置単体の形態 (1,433) | 載置するもの (126)
Fターム[3C007ES17]に分類される特許
41 - 60 / 126
物品移載用ロボット装置
【課題】 簡易な方法で物品に打痕などを生じさせず、均一かつ効率的な積付けを可能とする物品移載用ロボット装置を提供する。
【解決手段】物品受渡ステーション3において、物品供給手段4から受取った物品Wを、所定の積込み容器に積付ける物品移載用ロボット装置2であって、ロボットベース部20と、ロボットベース部20に回動自在に連結された多関節ロボットアーム部21と、ロボットアーム部21の先端に回動自在に連結されたロボットハンド部23とを含み、ロボットハンド部23は、バケット保持部8と、物品を収容するためのバケット部9からなり、バケット部9は、バケット保持部8に対して傾動可能に保持され、かつ角度調整駆動部12によって傾き角度の調整が可能とされる。
(もっと読む)
多関節ロボット

【課題】本発明はメンテナンスが容易な多関節ロボットを提供する。
【解決手段】搬送物を載置するハンド部8と、前記ハンド部8と連結され、少なくとも2つ以上の回転関節3、4、5を備え、前記ハンド部8を1方向に移動するように伸縮し、上下方向に対向するように配置された多関節アーム21、22と、上下に移動するようにコラム12に取り付けられた上下方向に移動する移動機構11と前記多関節アーム21、22とを連結する支持部材10と、前記コラム12の下端部に連結され、前記コラム12に取り付けられた前記多関節アーム21、22を旋回する台座13とからなる多関節ロボットにおいて、前記台座13を旋回させる減速機37の出力軸39の固定面が前記台座13を支持する前記軸受42の厚みの略中心に位置するものである。
(もっと読む)
搬送装置
【課題】搬送対象物を支持すると共に設置台に対して旋回可能に設置される支持手段を備える搬送装置の軽量化を図る。
【解決手段】搬送対象物を支持すると共に設置台1に対して旋回可能に設置される支持手段2を備える搬送装置であって、前記設置台1と前記支持手段2とのうち一方に固定される環状のガイド部31と、前記設置台1と前記支持手段2のうち他方に固定されると共に前記ガイド部31に沿って移動可能な複数のブロック部32とを有し、前記支持手段2を前記設置台1に対して旋回可能に支持する旋回支持手段3を備える。
(もっと読む)
基板処理装置およびその方法ならびに基板搬送装置
【課題】基板の搬送時間を十分に短縮できる基板処理装置およびその方法ならびに基板搬送装置を提供する。
【解決手段】インデクサブロックおよび処理ブロックからなる基板処理装置において、インデクサブロックと処理ブロックとの間で、基板WがインデクサロボットIRにより搬送される。インデクサロボットIRは上下に並ぶように設けられた複数のハンド要素260を備える。ハンド要素260間の距離は、インデクサブロックに搬入される基板Wが収納されたキャリアの基板収納溝間の距離と等しい。また、インデクサブロックおよび処理ブロック間に設けられる基板載置部PASS2の上下に隣接する支持板51a間(および支持板52a間)の距離は、ハンド要素260間の距離の2倍である。
(もっと読む)
ロボットハンド装置
【課題】 簡単な構成によって、受光部に対する他の投光部からの干渉を防ぐことができる投光部および受光部の複数対からなる光学的検出手段を備えたロボットハンド装置を提供する。
【解決手段】 ハンド基体11と、ハンド基体11に上下に等間隔で取付けられた複数のハンド12と、各ハンド12上のワーク6の有無を検出する光学的検出手段18とを含む。ハンド12にワーク6を載せて目的位置に移送するためのワークの移載装置1であって、光学的検出手段18は、各ハンド12に対応して対を成す投光部19〜23および受光部24〜28の複数対から成り、各投光部19〜23および受光部24〜28の対は、ハンド基体11に、各ハンド12の幅方向両側に対向関係で配置され、投光部19〜23および受光部24〜28は上下に交互に配置され、かつ、各投光部19〜23と対向関係にある受光部24〜28と、それに隣接する他の受光部とは、幅方向に直交する方向に互いにずれた位置関係で配置される。
(もっと読む)
物体入れ換え装置および物体移動装置
【課題】同一平面内において物体の位置入れ換えを効率的に行って、複数の物体の任意位置への移動を可能とする。
【解決手段】移動機構ビーム5a,5bの交点に配されたスライダ19aに、回転軸7aを介して物体搭載部11aを持つ入れ換え機構13aを連結する。移動機構ビーム6a,6bの交点に配されたスライダ19bに、回転軸7bを介して物体搭載部11bを持つ入れ換え機構13bを連結する。スライダ19a,19bの移動により、物体12a,12bが移動する。入れ換え機構13a,13bは、凸型接続部9aと凹型接続部9bの嵌合により連結可能とされている。この連結状態で、物体搭載部支持機構10が、物体搭載部11a,11bを支持した状態で回転し、物体搭載部11a,11b、従って物体12a,12bの位置入れ換えを行う。入れ換え機構13a,13bの干渉による影響を受けずに、物体12a,12bを任意位置に移動できる。
(もっと読む)
揺動機構を有するハンド及びそれを備えた基板搬送装置
【課題】ハンドに保持された基板の平面の法線方向において、これを直接的に相手側の基板保持機構と授受できるようにする基板搬送装置用のハンドを提供すること。
【解決手段】ハンド1を、基部となるハンドベース4と、ハンドベース4に重なるように配置され、基板2を支持する揺動ハンド3と、ハンドベース4と揺動ハンド3との間にあって、揺動ハンド3をハンドベース4に対して傾斜及び平行移動可能に支持する揺動機構5と、から構成した。
(もっと読む)
真空ピンセットおよびこれを用いた基板搬送装置ならびに基板処理装置
【課題】 剛性の低下を抑えて吸着力を向上させることによって、半導体ウエハ等の基板を確実に吸着して搬送できる真空ピンセットおよびこれを用いた基板搬送装置ならびに基板処理装置を提供する。
【解決手段】 先端側が二股に分岐した板状体7と、板状体7の先端部および分岐部の各表面の少なくとも3カ所に設けられた、気体を吸引して基板8を吸着するための吸着部3と、分岐部の吸着部3と他の吸着部3とをつなぐ吸引路4と、分岐部の吸着部3と吸引路4を介してつながって気体を吸引するための吸引部5とを備えてなる真空ピンセットにおいて、分岐部の吸着部3と吸引部5とをつなぐ吸引路4の断面積が、分岐部の吸着部3側よりも吸引部5側の方で大きい真空ピンセット1である。吸引に掛かる抵抗が小さくなり、吸引路4の容積が大きくなることから、吸着力が向上し基板8を確実に吸着することができる。
(もっと読む)
ロボットハンド用フォーク
【課題】軽量で、高剛性なロボットハンド用フォークを提供すること。
【解決手段】中空構造の棒状部材を有し、前記棒状部材は長手方向に対する側壁面に1または複数の開口部を持つロボットハンド用フォークであって、前記開口部の周囲に補強構造体を設けることにより、開口部周囲の変形を抑え、高剛性を実現するロボットハンド用フォークを得ることが可能となる。
(もっと読む)
CFRP製搬送用部材及びそれを用いたロボットハンド
【課題】ピッチ系炭素繊維の振動減衰性をさらに向上した搬送用部材を提供する。
【解決手段】高弾性率ピッチ系炭素繊維強化樹脂複合材料(CFRP)層及び該CFRP層を構成するマトリックス樹脂よりも低い引張弾性率を有する柔軟性樹脂層で構成されたCFRP製搬送用部材であり、特にピッチ系CFRP層間に前記柔軟性樹脂層が介挿された構造を有することを特徴とする。
(もっと読む)
搬送装置、搬送方法、およびデバイス製造方法
【課題】熱などの諸要因によって被保持面が変形した被保持体を、より確実に保持した状態で搬送することができる搬送装置、および搬送方法を提供すること。
【解決手段】被保持物の被保持面に対して保持面を当接させて前記被保持物を保持した状態で搬送する搬送アームAにおいて、該搬送アームAに、ウエハ吸着孔6が設けられたウエハ支持部2を設けるとともに、該ウエハ支持部2をウエハ支持部2の基端部2aを中心に所定の幅だけ回動自在に構成した。
(もっと読む)
基板保持具、基板搬送装置および基板処理システム
【課題】 基板を支持する支持部材を有する基板保持具がシステム構成部材と接触した場合でも、支持部材の損傷を極力回避できるようにする。
【解決手段】 基板保持具であるフォーク101は、スライダ127に固定されたピックベース117と、該ピックベース117に連結された支持部材として例えば4本の支持ピック119を備えている。支持ピック119は、中空の角筒状をなす本体131と本体131の先端に着脱自在に装着された保護部材としてのキャップ133とを有している。
(もっと読む)
ウエハ検出装置及びウエハ搬送装置
【課題】ウエハ搬送用のハンドが180°回転する構成のウエハ搬送装置において、ハンドに設けられたウエハ検出用のセンサ部の検出情報を本体側に支障なく伝達することを可能にする。
【解決手段】ウエハ搬送装置11は、本体13に対して回動軸21を介してハンド14が回動可能に支持され、ハンド14には第1光ファイバ及び第2光ファイバが、その第1端部が本体13と対向する位置で、かつ回動軸21に対して対称位置に配置され、第2端部が載置部19に載置されたウエハに光を出射及び反射光を受光可能に設けられている。本体13には、ハンド14が第1状態又は第2状態に配置された状態において、前記両光ファイバの第1端部の端面と対向する位置に投光部30及び受光部31が配置されている。ウエハの検出手段は、受光部31の受光量に基づいてウエハの検出を行う。
(もっと読む)
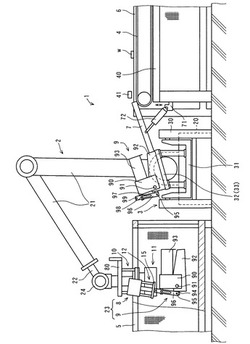
ロボット用ハンド
【課題】搬送物を多段に収納する収納ラックの高さを増大させることなく、収納ラックの各段の搬送物に対するフォークの意図しない当接を回避しながら搬送物の載置または取り出しを行うことが可能なロボット用ハンドを提供する。
【解決手段】このロボット用ハンド6は、先端部へ向かって上向きに傾斜して延びるように配置されるフォーク10を備え、そのフォーク10上に搬送物としてのガラス基板100を載せて搬送するものであって、フォーク10には、その基端部側の第1位置P1と、この第1位置P1よりも先端部側の第2位置P2とに移動可能な加重部材13が設けられている。
(もっと読む)
基板保持装置、基板保持方法、半導体製造装置及び記憶媒体
【課題】基板を搬送する間や基板の位置合わせを行う間にその基板の温度調整を行うこと。
【解決手段】基板の裏面に対向する基板保持面を備えた基板保持部と、各々基板の裏面を支持し、基板との摩擦力によって当該基板の前記基板保持面に対する横滑りを防止する凸部と、前記基板保持面に開口し、基板の裏面に向けてガスを吐出するガス吐出口と、その一端が前記ガス吐出口に接続されたガス流路を流通するガスを温度調整する温度調整部と、を備え、基板の裏面に吐出された前記ガスは基板保持面と基板との隙間を流れ、その隙間の圧力が低下するベルヌーイ効果により、当該基板が基板保持部へ向けて吸引されることにより基板を保持するように基板保持装置を構成する。この基板保持装置は基板搬送手段や基板位置合わせ手段にも適用することができる。
(もっと読む)
エンドエフェクタ及びこれを有する基板移送ロボット
【課題】エンドエフェクタを含む基板移送ロボットを提供すること。
【解決手段】前記エンドエフェクタは、リストプレートと、垂直方向に移動自在に前記リストプレートに連結され、第1基板を支持するための第1ブレードと、前記第1ブレードと隣接するように前記リストプレートに連結され、第2基板を支持するための第2ブレードと、を含む。昇降ユニットは、前記第1基板が前記第1ブレードによって支持されるように前記第1ブレードを上方に移動させ、前記第2基板が前記第2ブレードによって支持されるよう前記第1ブレードを下方に移動させる。
(もっと読む)
複数のウェハを取り扱う能力を備えた受渡し機構
一体化されたロボット機構は、搬送機器を改善し、対象物移動を、アライメント又は識別等の別の機能と一体化するために開示されている。開示された一体化されたロボットアセンブリは、複数の加工物を移動させるための多重エンドエフェクタと、1つの加工物を移動させるための単一エンドエフェクタと、アライメント能力を提供するためのロボットボディに組み込まれた回転チャックと、搬送中に対象物を識別するための選択的な識別サブシステムとを有することができる。本発明のロボットアセンブリは、ソータ又はストッカ機器において、処理機器において、及び受渡しシステムにおいて使用されることができる。 (もっと読む)
真空処理装置、基板搬送方法
【課題】複数枚の基板を一台のハンドに乗せて正確な位置に搬送する。
【解決手段】ハンドに設けられた第一、第二の載置部15a,15bと、第一、第二の台座9a,9bとの間の距離が異なるように高さを違えておき、搬送室内から処理室内に基板16a,16bを第一、第二の台座9a,9b上に配置する際に、先ず、距離が近い方の第一の載置部15aと第一の台座9aとを位置合わせし、第一、第二の載置部15a,15bを降下させ、近い方の第一の台座9a上に基板16aを載置し、第一の載置部15aを基板16aの裏面から離間させた状態で、他方の第二の載置部15bと第二の台座9bを位置合わせし、基板16bを配置する。基板16a,16bを一枚ずつ位置合わせして配置することができる。
(もっと読む)
産業用ロボット
【課題】旋回径を小さくしつつ、1回の搬入動作あるいは搬出動作で複数の搬送対象物を搬送することが可能な産業用ロボットの具体的な構成を提供すること。
【解決手段】ロボット1は、複数の搬送対象物2を搭載する第1ハンド3、第2ハンド4と、第1ハンド3、第2ハンド4をそれぞれ保持する第1アーム5、第2アーム6と、第1アーム5および第2アーム6を保持する共通アーム7と、共通アーム7に対する第1アーム5、第2アーム6のそれぞれの回動中心となる第1回動中心部31、第2回動中心部41と、共通アーム7を保持する本体部とを備えている。第1ハンド3と第2ハンド4とはロボット1の旋回動作時に重なるように配置され、第1ハンド3および第2ハンド4には、第1回動中心部31および第2回動中心部41との干渉を防止するための逃げ部43、44が形成されている。
(もっと読む)
基板搬送装置
【課題】構成を複雑化することなく安定かつ高精度な搬送性を得ることができる基板搬送装置を提供する。
【解決手段】本発明に係る基板搬送装置は、一端が基台63の支持軸に支持され、他端が基板支持用のハンド62に接続された多関節アーム61と、ハンドの直線移動を案内するリニアガイド66と、ハンドをリニアガイドのガイドレール67aに沿って移動させるベルト76と、ベルトを駆動する駆動機構68と、ハンドとリニアガイドのスライダー67bとの間を連結する連結部材81とを備える。連結部材は、当該ハンドの進行方向に平行な第1の方向へのハンドとスライダー間の相対移動を規制し、かつ、鉛直方向に平行な第2の方向へのハンドとスライダー間の相対移動を許容する。
(もっと読む)
41 - 60 / 126
[ Back to top ]