
Fターム[3C007ES17]の内容
マニピュレータ、ロボット (46,145) | 挟持装置単体の形態 (1,433) | 載置するもの (126)
Fターム[3C007ES17]に分類される特許
81 - 100 / 126
基板移載ロボット
【課題】基板の位置決めの際に、基板に生じる傷を軽減できる基板移載ロボットを提供すること。
【解決手段】基板が載置されるハンドユニットと、前記ハンドユニット上に載置された前記基板の位置決めを行なう位置決め手段と、を備えた基板移載ロボットにおいて、前記ハンドユニットが、ハンド本体部と、前記ハンド本体部から上方へ突出し、前記基板が載置される複数の載置部材と、を備え、各々の前記載置部材は、その上端において回転自在に支持されて自由回転する回転体を有することを特徴とする。
(もっと読む)
基板移載装置,基板処理装置,基板移載用アーム,基板移載方法

【課題】ウエハ保持ボートにおける任意の保持板との間で基板のやり取りを可能としつつ,保持板のピッチを従来以上に狭くする。
【解決手段】基板移載装置300は,旋回及び昇降可能に構成された基台310と,基台に進退可能に設けられ,ウエハを載せて搬送するための搬送フォーク部322を有する第1アーム320と,基台に進退可能に設けられ,起倒可能な基板持ち上げ機構340を設けた持ち上げフォーク部332を有する第2アーム330とを備える。
(もっと読む)
ロボット・リスト・アセンブリの為の方法および装置
本発明は、リスト・アセンブリ100の為の方法、装置、システムを提供する。リスト・アセンブリ100は、キャップ104と底部112を有するハウジングと、上記ハウジングに少なくとも一部が内包され、ロボット・アームに結合されるように適合された少なくとも1つのピボットと、上記ピボットに結合され、ベアリングの周りに上記ピボットを回転させるように適合されたベルトとを含む。上記ハウジングの底部は、少なくとも1つのピボットとベアリングから離して熱を反射するように適合されている。  (もっと読む)
(もっと読む)
直線移動機構およびこれを用いた搬送ロボット
【課題】 正確な直線移動行程を実現しつつ、構造の簡略化を図ることができる直線移動機構、およびこれを用いた搬送ロボット、さらには真空環境下での使用に適した当該搬送ロボットを提供する。
【解決手段】 本発明に係る直線移動機構B1は、ガイド部材1と、このガイド部材1上に設定された水平直線状の移動行程GLに沿って移動可能な2つの移動部材と、駆動プーリ31b、およびこの駆動プーリ31bに掛け回されて移動行程GLの平行線に沿う所定の往復動区間3Aa,3Bbを往復動する出力ベルト33を含んで構成された駆動機構3A,3Bと、駆動プーリ31bを駆動するためのモータM3,M4とを備え、移動部材は、連結部材24a,24bによって駆動機構3A,3Bの出力ベルト33にそれぞれ連結されており、駆動機構3A,3BおよびモータM3,M4は、それぞれガイド部材1に支持されている。
(もっと読む)
基板を移送する装置及び方法
【課題】 容器にローディングされた複数の基板を選択的にアンローディングできる基板移送装置及び方法を提供する。
【解決手段】容器内から複数の基板を引き出して移送する基板移送装置は、移送の時に複数の基板が各々載置される複數のブレードと、各々のブレード420aの一端に設置され、容器から基板を引き出す時、ブレード420aの上部に突出される引出部材500aと、各々のブレード420aから各々の引出部材500aを選択的に突出させる駆動ユニット600とを含む。引出部材500aは、中空形であり、ブレード420aの一端に形成された締結孔424aで上下移動するように設置される。引出部材500aは、上部が閉塞された形状を有する。
(もっと読む)
ウエーハの保持機構
【課題】薄化したウェーハを損傷することなく保持することができるとともに、リング状の補強部を残したウェーハであっても搬送することができるウェーハの保持構造を提供する。
【解決手段】ウエーハハンド120は、ハンドピック122が先端部122aを外向きにされた状態でウエーハ1の直上に移動し、さらにハンドピック122の下面がウエーハ1の下面よりも下に位置するまで下降する。次いで、ハンドシャフト124が回転することによってギヤプレート123が回転し、これに連動して各ピックシャフト125とともにハンドピック122が約180°回転し、ハンドピック122の先端部122aがウエーハ1の下面に入り込む。この状態を保持してウエーハハンド120を上昇させウエーハ1を持ち上げる。
(もっと読む)
基板搬送装置およびそれを用いた基板搬送方法
【課題】本発明の課題は、基板に反りや歪があっても、その基板にストレスを与えることなくそのままの状態で搬送できる基板搬送装置およびそれを用いた基板搬送方法を提供することである。
【解決手段】本発明の搬送装置1は、それぞれに3個ずつの吸着孔4a〜4c,4d〜4fを有し、ウェーハWを表裏両面から吸着挟持する上下のフォーク2,3と、上下のフォーク2,3を開閉動作させ、ウェーハWを挟み込んだり、開放したりする駆動部13a,13bと、吸着孔4a〜4c,4d〜4fの吸着圧力を一つ一つ個別に検知する圧力センサ6a〜6fと、その検知結果に基づいて、上下のフォーク2,3の開閉動作を制御する制御部11とを備えている。
(もっと読む)
半導体移送装備(Semiconductormaterialhandlingsystem)
【課題】半導体移送装備を提供すること。
【解決手段】半導体移送装備において、ウエハ移送ロボット1000は、フレーム内に装着され、所定の昇降軸に沿って上下移動する昇降部材を含むロボットボディー100と、駆動リンクと複数の被動リンクとからなり、駆動リンクは昇降部材に装着され、被動リンクの末端部はロードポートが装着されたフレーム面に沿って水平方向に線形移動する関節アーム200と、被動リンクの末端部に装着され、垂直の回転軸を中心に回転するスイングユニット300と、スイングユニットに装着されるベース、ベースに装着されて水平方向に直線往復運動する複数のスライディングユニット、およびウエハカセットからウエハを引き出し、収納するウエハハンドを含む直交アーム400とを備える。
(もっと読む)
基板搬送ロボット用ハンド及びそれを用いた基板搬送ロボット
【課題】
自重による基板の撓みがあっても基板収納カセットの基板の収納可能枚数を減少させる必要がないと共に、簡単な構造で低コストで製造できる基板搬送ロボット用ハンドを提供する。
【解決手段】
基板収納カセット中に所定間隔で配置された複数枚の基板Sを取り出したり収納したりする基板搬送ロボット10に使用されるハンド20で、ハンド20の前記カセットへの挿入方向に直交する方向に湾曲または屈曲せしめられた板状部材21と、板状部材21をその基端部でロボット10のアーム13に装着するための固定部材14及び15とを備える。板状部材21の湾曲・屈曲の向きは、前記カセット中に配置された基板Sの撓みの向きと一致し、その湾曲・屈曲の度合いは基板Sの自重による撓みにほぼ等しいか、基板Sの自重による撓みよりも大きく且つ板状部材21の全厚が前記カセットの基板Sの配置ピッチを越えないように設定される。
(もっと読む)
部品ピックアップ装置および部品ピックアップ方法
【課題】大きなコストアップを招くことなく、簡易な構成で部品のピックアップ作業を行えるようにする。
【解決手段】ロボット1のアーム11の先端部にホーキマニピュレータ13と、チリトリトレイ33を取り付ける。ホーキマニピュレータ13は、先端にホーキ部31を備え、部品箱5内の部品7を、水平方向にずらすようにして移動させることで、チリトリトレイ33に移載する。
(もっと読む)
プレートの表面との付着接触装置、および、該装置を備えるプレートの把持システム
本発明に係る、ガラス板または半導体板(ウエハ)等のプレート(3)の表面(2)に付着接触する装置(1)は、該プレート表面(2)に、吸着力により付着する付着接触面(5)を備えた可撓性材料(4)を含むベース(10)と、可撓性材料(4)からなる付着接触面(5)とプレート(3)の表面(2)との間の分離抵抗を、付着接触面(5)に垂直な方向(7)および平行な方向(8)において、異ならせる手段(6)とを備えることを特徴とする。 (もっと読む)
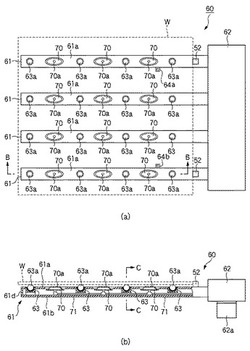
移載方法及びその装置
【課題】支持板材を進退機構により進退移動させることにより移載ベルトの支持板材の作用面側により被移載物を移載することができ、この移載により、移載ベルトと被移載物との間での摩擦は生じないので被移載物を傷つけたりすることがなく、柔軟性や難掴持性の被移載物を容易に移載することができると共に複雑な機構を採用することがなく、簡素な構造とすることができる。
【解決手段】移載本体1と、支持板材3の作用面3b側から先端部3aを折り返して非作用面側3dを経て後端部3cで折り返して巻回配置された被移載物Wを移載可能な移載ベルト4と、移載ベルトの作用面側の部位を移載本体に固定可能な固定機構5と、支持板材を進退移動させる進退機構6とを備えてなる。
(もっと読む)
ハンド
【課題】厚さが比較的薄い半導体ウエーハと通常厚さの半導体ウエーハなどといった、相反する性質を持つ2種類の半導体ウエーハを、ハンドの構成部品をその都度交換することなく搬送することができるハンドを提供する。
【解決手段】ハンド14の一方側面38Aに設けられた第1非接触保持部40により半導体ウエーハWが非接触の状態で保持される。また、同時に、ハンド14の他方側面38Bに設けられた第2非接触保持部60により半導体ウエーハWが非接触の状態で保持される。
(もっと読む)
基板搬送装置、これを用いた表示パネルの製造装置、及び、基板搬送方法、これを用いた表示パネルの製造方法
【課題】 基板搬送装置及び表示パネルの製造装置のスペース効率を向上させること。
【解決手段】 加工装置35を設けた搬送路12に沿って、搬送ロボット13を移動させて、第1の基板31を加工装置35に供給し、加工装置35にて加工の完了した第1の基板31を搬出する基板搬送装置10において、第1の基板31と同じ搬送路12に沿って搬送ロボット13を移動させて、第1の基板31と一対をなす第2の基板32を加工装置35を通過して搬出可能とするもの。
(もっと読む)
ロボット用ハンドおよび該ハンドを具備する搬送ロボット
【課題】対象物を保持する部材の間隔の調整を簡易な構造で実現することにより、軽量かつコンパクトなハンドをロボットに搭載可能にして、安価で小型のロボットを提供すること。
【解決手段】保持するパネルの幅に応じてフォーク15の間隔を調整可能な搬送ロボット用ハンド11であって、フォークを固設した台車23のスライダ23aを連結するレール部材22と、台車が連設されてプーリ25、26に巻き掛ける無端のタイミングベルト27と、このベルトを繰り返し送って回転駆動させる送り機構30と、を備えており、送り機構は、ベルトを挟持・解放する挟持用エアーシリンダ31と、この挟持用シリンダをベルトの延在方向に往復移動させる送り用エアーシリンダ32と、を具備して、プーリ25、26間のベルトの第1、第2ライン部27a、27bのそれぞれに配設されている。
(もっと読む)
走行型ロボット装置及びその制御方法
【課題】比較的重量物であるワークに対してもアームを肥大化させることなくコンパクト化を図ることができ、ワークの積み降ろしにかかるサイクルタイムを短縮することができる走行型ロボット装置及びその制御方法を提供すること。
【解決手段】複数のリンク機構(第一リンク機構11・第二リンク機構12)により水平方向に旋回可能及び伸縮可能に構成されるアーム7と、アーム7の先端部に設けられワークを支持するフォーク9(ワーク支持体)を支持するとともに昇降及び旋回させるロボットアーム20(昇降旋回手段)とを有するロボット6を、走行台5上に備える走行型ロボット装置1であって、フォーク9と連結され、該フォーク9の、ロボットアーム20による昇降動作、旋回動作及びアーム7の伸縮による水平方向の移動動作をアシストするアシスト手段30を設けた。
(もっと読む)
液晶基板搬送用フォーク
【課題】重量を増加することなく、液晶基板積載時のたわみ量を減少し、振動を減衰させることができる液晶基板搬送用フォークを提供すること。
【解決手段】液晶基板を載せるための複数のフォーク部と、前記フォーク部と垂直に配設され、各フォーク部を所定間隔で保持固定するブラケット部とから成り、前記フォーク部を断面形状が中空の薄肉炭素繊維強化樹脂から構成し、その中空内部に発泡樹脂を充填したので、重量を増加することなく、液晶基板積載時のたわみ量を減少させることができる。
(もっと読む)
基板搬送装置、及び基板搬送システム
【課題】製造工程の効率化を図れる基板搬送装置を提供することにある。
【解決手段】処理チャンバ12にガラス基板Bを搬出入する転送ロボット20は、ベース部21に対して旋回可能に支持されたアーム部22と、ガラス基板Bを保持するテーブル部26を備え、アーム部26に対して回転機構25を介してテーブル部26が連結されている。回転機構25によりテーブル部26を回転させることにより、テーブル部26上に載置されるガラス基板Bの処理チャンバ12に対する搬入向きを変えることができる。これにより、特定の処理工程で不良が発生しているか否かを確認したいときに、処理チャンバ12に搬入されるガラス基板Bの向きを容易に変えることができる。したがって、不良発生工程を迅速かつ容易に特定することができ、製造工程の効率化を図ることができる。
(もっと読む)
部品搬送装置および部品搬送方法
【課題】部品表面に接触することなく、低ストレスで部品を搬送する。
【解決手段】保持アーム3がチップトレイ10に接触した後、搬送ヘッド1を下降させ、搬送ヘッド1の貫通孔2から空気を引き、吸引口2a方向へICチップ11を吸引する。そして、搬送ヘッド1が上方へと移動することにより、ICチップ11は前記吸引によりトレイポケット部10aから浮上する。保持アーム3の下アーム部3bが、浮上している状態のICチップ11の底部に入り込んで、ICチップ11を掬い上げるように保持し、搬送ユニット体8を、ICチップ11を載置する所定の位置まで搬送する。
(もっと読む)
ロボットハンド用フォークおよびロボットハンド
【課題】高剛性かつ軽量なロボットハンド用フォークを提供する。
【解決手段】繊維強化プラスチック(FRP)層を含み、断面が中空矩形であるロボットハンド用フォークにおいて、前記断面を構成する4面のうち、載荷面に対し略直角をなす2面の厚みが、載荷面と載荷面に対向する面の2面の厚みよりも小さく、かつ、載荷面に対し略直角をなす2面には、前記フォークの長手方向に対して斜めに繊維配向させたFRP層を含むことを特徴とするロボットハンド用フォーク。
(もっと読む)
81 - 100 / 126
[ Back to top ]