
Fターム[3C007ES17]の内容
マニピュレータ、ロボット (46,145) | 挟持装置単体の形態 (1,433) | 載置するもの (126)
Fターム[3C007ES17]に分類される特許
61 - 80 / 126
防塵機構を備えた基板搬送ロボット及びそれを備えた半導体製造装置

【課題】直動式アーム内にあるリニアスライダなどの機構からの発塵を抑制するとともに、真空中に置かれる基板搬送ロボットでも使用可能な防塵機構を提供すること
【解決手段】リニアスライダによって直動する直動式アーム3を備えて基板9を所望の位置に搬送する基板搬送ロボット1において、リニアスライダ18、23を摺動可能に保持するリニアレール7、8の近傍に、リニアスライダ18、23と微小な隙間を介して敷設され、ポリ塩化ビニール又はフッ素樹脂で製作された集塵カバ44をリニアレール7、8に沿って敷設した。リニアレール6上を摺動するリニアスライダ7直近に集塵カバ10を設置し、リニアレール6上のリニアスライダ7が摺動する際に飛散するパーティクル13を集塵カバ10のラビリンス形状部で収集し、アームカバ8の開口部からパーティクル13が流出することを防止し、ウエハ搬送フォーク3上のウエハ12にパーティクル13を付着させない処置をする。
(もっと読む)
基板搬送ロボット

【課題】基板が損傷しない基板搬送ロボットを提供する。
【解決手段】第一、第二の従動アームによって回転され、互いに歯合した第一、第二の規制ギアに対し、それぞれ歯合する第一、第二のピニオンギアを設け、第一、第二のピニオンギアでピニオンギア用ラックを挟む。ハンドが放射方向外側から内側に向けて移動し、ハンドが搬送室内に位置する状態では、ピニオンギア用ラックは放射方向外側に移動し、緩衝部材を介して基板を押圧し、基板をクランプする。ハンドが放射方向外側に移動し、処理室内に位置するときは、ピニオンギア用ラックは放射方向内側に移動し、クランプは解除される。搬送室内でクランプされているので高速移動が可能である。
(もっと読む)
産業用ロボット
【課題】簡易な構成で、搬送対象物の把持、解放を行うことができる産業用ロボットを提供すること。
【解決手段】産業用ロボットは、搬送対象物2を搭載するハンド3と、ハンド3を保持する多関節アーム部とを備えている。ハンド3は、搬送対象物2を把持するための把持部28と、搬送対象物2から退避させる方向へ把持部28を付勢する付勢部材29とを備えている。把持部28は、搬送対象物2に当接する把持部材34と、多関節アーム部の伸縮動作に伴う慣性力で、把持部材34が搬送対象物2に当接する方向へ把持部材34を移動させる重量部材35とを備えている。
(もっと読む)
搬送用治具
【課題】炭素繊維強化樹脂複合材を用いて、その利点を生かしながら、パーティクル発生を抑制し、清浄環境下での基板等を搬送する用途に十分適した搬送用治具を提供する。
【解決手段】複数枚の繊維強化プリプレグシート4Bを積層した積層板を加工してなり、板状物を搬送する搬送装置において板状物を直接接触して保持することができる搬送用治具であって、積層板の表面が樹脂シート4Aで被覆され、加工端面が端面保護層5で被覆されている搬送用治具1。
(もっと読む)
基板搬送装置
【課題】厚みが薄く、かつ撓みが生じにくい搬送フォーク、特に、焼成処理温度のような高温下にさらされた場合であっても撓みが生じにくい搬送フォークを備える基板搬送装置を提供する。
【解決手段】基板焼成炉に対する基板の搬出入を行う基板搬送装置の備える搬送フォーク24を、ハニカム構造体である本体部材Bと、本体部材Bの上面に接合され、本体部材Bよりも熱膨張率の小さい材質によって形成された天板部材Hとによって構成する。搬送フォーク24が高温下にさらされると、本体部材Bと天板部材Hとの間の熱膨張率の差に起因して、相対的に熱膨張率が小さな部材である天板部材Hの側に曲がろうとする上向きの力が生じる。搬送フォーク24の撓みの原因となる下向きの力(すなわち、支持する基板Wの重みや自重に起因する下向きの力)が、この上向きの力で相殺されることによって、搬送フォーク24の撓みが抑制される。
(もっと読む)
搬送装置
【課題】真空雰囲気下で加熱された板状ワークを搬送する場合において、当該ワークからの熱による不都合を解消ないし低減する。
【解決手段】搬送装置Aは、固定ベース1と、固定ベース1に対して旋回可能に支持された旋回ベース2と、旋回ベース2に支持され、ガイドレール32A,32Bを含んで構成された直線移動機構3と、ガイドレール32A,32Bに支持され、直線移動機構3の作動によりワークWを水平直線状の移動行程に沿って搬送するハンド4A,4Bとを備える。ハンド4A,4Bとガイドレール32A,32Bとの間には熱反射板8が設けられる一方、固定ベース1および旋回ベース2には、固定ベース1側と旋回ベース2側とを常に連通させる空間502,602を含んで構成された冷媒循環路が設けられている。上記冷媒循環路は、上記熱反射板8に接するように取り回された冷却管71,73,74,76を含む。
(もっと読む)
搬送用ロボットハンド
【課題】高剛性でかつガラス基板を水平に保持し、高速で安定して搬送することができる搬送用ロボットハンドを提供する。
【解決手段】中空形状である複数のフォーク5を備えた搬送用ロボットハンド1において、前記フォークの固定端側の曲げ剛性が、前記フォークのうち少なくとも2本において異なっていることを特徴とする搬送用ロボットハンド。
(もっと読む)
基板を搬送するためのエンドエフェクタおよびロボット
基板搬送ロボットのエンドエフェクタが、繊維強化プラスチック(FRP)から製造された上プレートと、繊維強化プラスチック(FRP)から製造された下プレートと、上プレートと下プレートとの間に配置され、アルミニウム、ステンレス鋼およびハニカム形繊維強化プラスチック(FRP)からなる群から選択された中間部材とを備える。さらに、基板搬送ロボットが上記のエンドエフェクタを備えている。 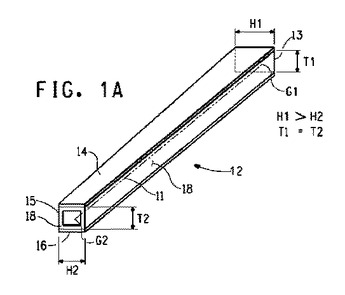 (もっと読む)
(もっと読む)
基板移送用高温抗垂下エンドエフェクター
【課題】本発明の実施形態は、半導体基板移送用の高温抗垂下エンドエフェクターに関する。本発明の一実施形態により基板ハンドラーと共に用いるエンドエフェクターが提供される。
【解決手段】エンドエフェクターは基板を支えるように配置し、その基板を水平面に対し第1角度に位置する基板支持面を有する自由端を含む。エンドエフェクターは基板ハンドラーに取付けるように配置した固定端を含み、基板が自由端上に配置されず、第1角度が第2角度と異なる場合には、基板支持面が水平面に対して第2角度になる位置でエンドエフェクターを基板ハンドラーに取付ける。
(もっと読む)
基板容器用ロボットハンドと蓋付基板容器
【課題】容器及び蓋からなる薄い基板容器を、容器に挟み込む力を作用させることなくハンドリングして、炉内に積層して載置し、炉内から搬出することができ、これにより基板の汚染を防止しながら水蒸気アニール処理をし、かつ炉内処理領域への基板のセット数を高めて、スループットを高めることができる基板容器用ロボットハンドと蓋付基板容器を提供する。
【解決手段】水平に位置する蓋付基板容器3の外縁に沿って延び、水平かつ対向して互いに平行に拡縮可能な1対の容器支持枠12と、容器支持枠を蓋付基板容器の外縁に近接する縮小位置Cと離れた拡大位置Oとの間で移動させる支持枠駆動装置14と、支持枠駆動装置を支持し、容器支持枠を間隔を隔てて水平に囲む枠部材16とを備える。蓋付基板容器3は、その外周の少なくとも一部に所定角度のテーパ下面3cを有し、1対の容器支持枠12は、縮小位置においてテーパ下面に近接しかつ同一角度のテーパ上面12aを有する。
(もっと読む)
FRP管状体
【課題】FRP製ロボットハンドの曲げ剛性向上と機械加工性の向上との両立を可能とするFRP管状体を提供する。
【解決手段】繊維強化プラスチックからなる管状体において、外表面が、管軸方向に対し−5〜+5°の範囲内で一方向に引き揃えられた炭素繊維を強化繊維とするCFRP層[A]と、織物および/または不織布を強化繊維として厚みが0.01〜0.2mmの範囲内のFRP層[B]とからなり、外表面の全面積に占める[A]の面積が30〜98%の範囲内であり、かつ管状体を形成するFRPの厚み方向への貫通穴の外周がFRP層[B]に接していることを特徴とするFRP管状体。
(もっと読む)
フォーク状ハンド先端に装着した緩衝用のバンパー
【課題】 フォークが大きな平面状の搬送物を搬送する際、他の積み重ねた搬送物を破損させることが無く、しかも簡単な板金構造でバネの要素のあるフォーク先端に装着するバンパーを提供すること。
【解決手段】 搬送ロボット等のアームに取り付けられた搬送物を載せるフォーク状ハンド先端に装着した緩衝用のバンパーにおいて、フォーク状ハンドの搬送物に対する進行方向に少なくとも1以上の折り曲げ部の有る板状の構造物であることを特徴とするフォーク状ハンド先端に装着した緩衝用のバンパーとした。
(もっと読む)
高温ロボットエンドエフェクタ
【課題】処理システムにおいて基板を搬送するのに好適なロボットエンドエフェクタ又はブレードを提供する。
【解決手段】ある実施形態において、エンドエフェクタは反対の装着端と遠端とを有し、セラミックの単体の塊から作製された本体を含む。この本体は本体の上面から上方に延びる一対の弓型リップを含む。各リップは、本体の遠端に配置された各フィンガーに配置されている。弓型内壁は、本体の装着端で、上面から上方に延びている。内壁とリップは基板受容ポケットを画定している。複数の接触パッドが本体の上面から上方に延びており、そこで基板はサポートされる。リセスが本体の底面に形成されていて、装着クランプが収容されている。
(もっと読む)
ロボットハンド用フォークおよびロボットハンド
【課題】
ロボットハンド用フォークを構成する管状体と内部に挿入されている部材との接合力を強固にし、優れたロボットハンド用フォーク及び前記フォークを備えたロボットハンドを提供すること
【解決手段】
ねじによって土台に固定されてロボットハンドを構成するフォークであって、断面が矩形である管状体Aと、管状体Aの一端部に挿入された部材Bと、管状体Aの外面から内面まで貫通し部材Bに到達している前記ねじの座ぐり穴とを有し、管状体Aおよび部材Bが管状体Aの内面に対して部材Bを押しつけることで接合固定されていることを特徴とするフォーク。
(もっと読む)
半導体ウェーハ用のクランプ治具
【課題】 フィラーが露出して半導体ウェーハを切削したり、フィラーが脱落してパーティクルを発生させるのを抑制できる半導体ウェーハ用のクランプ治具を提供する。
【解決手段】 半導体ウェーハWの直径以上の長さを有するクランプ板1を備え、クランプ板1の半導体ウェーハWに接触する複数の接触領域をダイヤモンドライクカーボン10によりそれぞれ被覆して耐汚染性、耐食性、耐摩耗性を向上させる。接触領域であるクランプチップ5にダイヤモンドライクカーボン10を皮膜として生成し、カーボンファイバーの端部が露出したり、短いカーボンファイバーが脱落するのを防止するとともに、導電性、耐食性、耐磨耗性等を付与するので、アウトガスや低分子不純物の移行を低減したり、最近の回路の微細化要求を満たしながら半導体ウェーハWの汚染を有効に抑制することができる。
(もっと読む)
基板処理システム、基板搬送装置、基板搬送方法、および記録媒体
【課題】搬送中における基板に対して適切な処置を施すことができる基板搬送装置を提供する。
【解決手段】基板搬送装置50は、第1基板収容部20と第2基板収容部30との間を移動可能なフォーク支持体51と、フォーク支持体に移動可能に支持されたフォーク60,65と、を備える。フォークは、第1基板収容部から第2基板収容部へ搬送される基板を第1支持位置において支持し、第2基板収容部から第1基板収容部へ搬送される基板を第1支持位置とは異なる第2支持位置において支持する。第1支持位置に基板を支持したフォークは、フォーク支持体の移動中に第1待機位置に配置され、第2支持位置に基板を支持したフォークは、フォーク支持体の移動中に第1待機位置とは異なる第2待機位置に配置される。
(もっと読む)
ワーク保持機構
【課題】真空雰囲気の下で用いることができるとともに、軽量かつ簡素な構成とすることができ、搬送時におけるワークの横ずれを確実に防いで搬送速度向上にも寄与することができるワーク保持機構を提供する。
【解決手段】平板状のワークWを水平に保持するためのワーク保持機構は、ワークWが載せられるベース部材1と、ベース部材1の所定箇所に設けられた複数のガイド部材2とを備え、ガイド部材2は、ベース部材1に対して回転自在に支持される軸部20と、ベース部材1にワークWが載せられる際、このワークWの周縁部における下面一部に当接することにより、軸部20を支点として下方に押し下げられる当接部21と、当接部21が下方に押し下げられると、軸部20を支点として上方に押し上げられることにより、ワークWの周縁部における側面一部に対向した姿勢をとる規制部22とを有して構成されている。
(もっと読む)
伸縮式移載装置
【課題】移載部に設置すべきセンサの配線に起因する断線、パーティクルの問題が発生しない伸縮式移載装置を提供する。
【解決手段】基台1に対して移載部5が水平方向に進出後退する伸縮式移載装置30であって、この移載部5に設置すべきセンサ6A、6Bを無線式とし、このセンサ6A、6Bに電源を供給する充電池7を移載部5に備え、この移載部5が待機位置にあるときに、充電池7を充電する非接触充電手段8を基台1に備えた。
(もっと読む)
基板吸着装置およびそれを用いた基板搬送ロボット
【課題】吸着力を保持しながら基板の変形に追従するとともに、外力が開放されたとき(基板開放時)に元の位置に戻る復元力を有し、安定的な基板吸着装置およびこれを用いた搬送ロボットを提供する。
【解決手段】基板吸着部141を有する中空の吸着パッド14と、この吸着パッド14を弾性的に支持する弾性部材からなるパッド支持部材15と、エア吸着力を発生する基板吸着部141とを備えた基板吸着装置13において、
摩擦低減機構を有するマニホールド16と、前記吸着パッド14と前記マニホールド16との間に弾性体18を備えたものである。
(もっと読む)
制振制御機能を持ったロボットハンド
【課題】ロボットハンドの撓み及び振動を大幅に低減し、ガラス基板が更に大型化しても、高い基板収納効率、及び安定した搬送性を確保する制振制御機能を持ったロボットハンドを提供する。
【解決手段】ロボットハンド3の上下面に一対の圧電素子アクチュエーター4が、長さ方向に等間隔に複数対設けられ、ロボットハンドの撓み変位量又は/及び振動を圧電素子アクチュエーターの出力電圧変化として検出するモニタリング手段、検出した出力電圧変化と逆位相の電圧を圧電素子アクチュエーターへ印可するフィードバック手段を具備すること。
(もっと読む)
61 - 80 / 126
[ Back to top ]